This project was inspired by the green house at the AWS Loft. Our team got to thinking if we can actually create a way to monitor the health of our plants and get that information in the form of a flash briefing.
The product detects when a person walks inside the green house, and gives a flash briefing of the plant health via Bluetooth speaker.
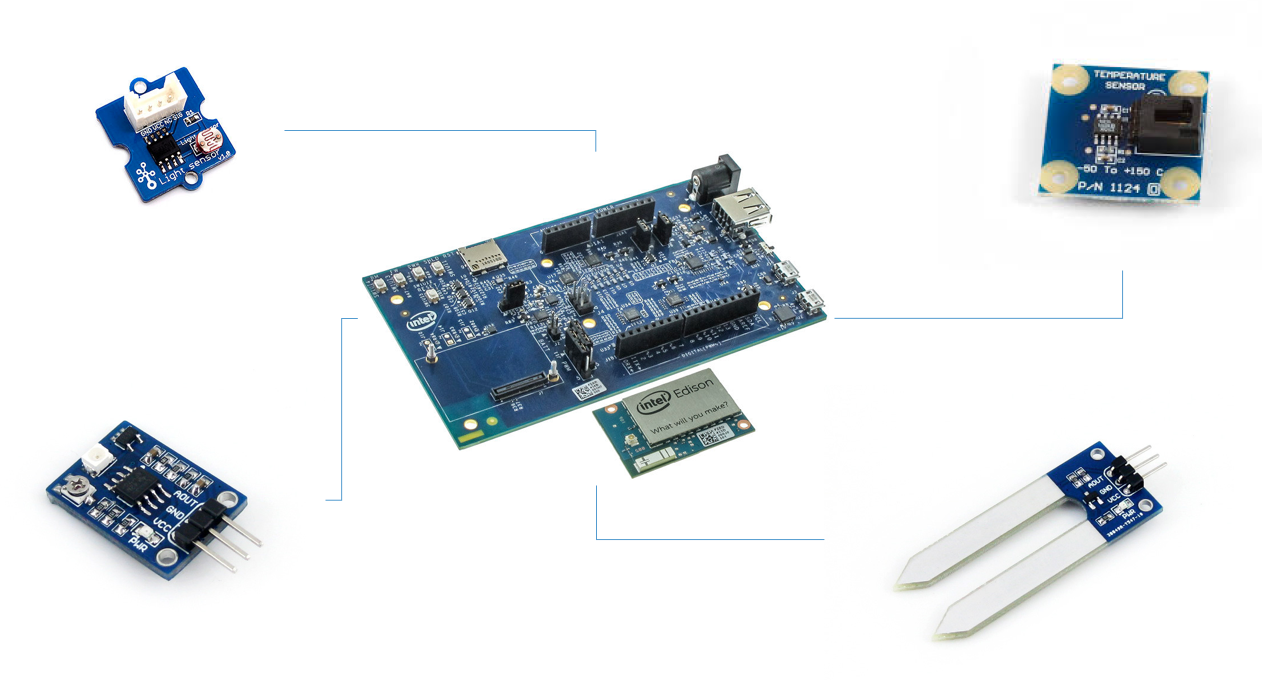
- Setup Intel Edison on the breakout board and configure it with your laptop
- Connect the required sensors to the breakout board
- Download Arduino IDE and paste the code below
- Setup espeak on your Edison
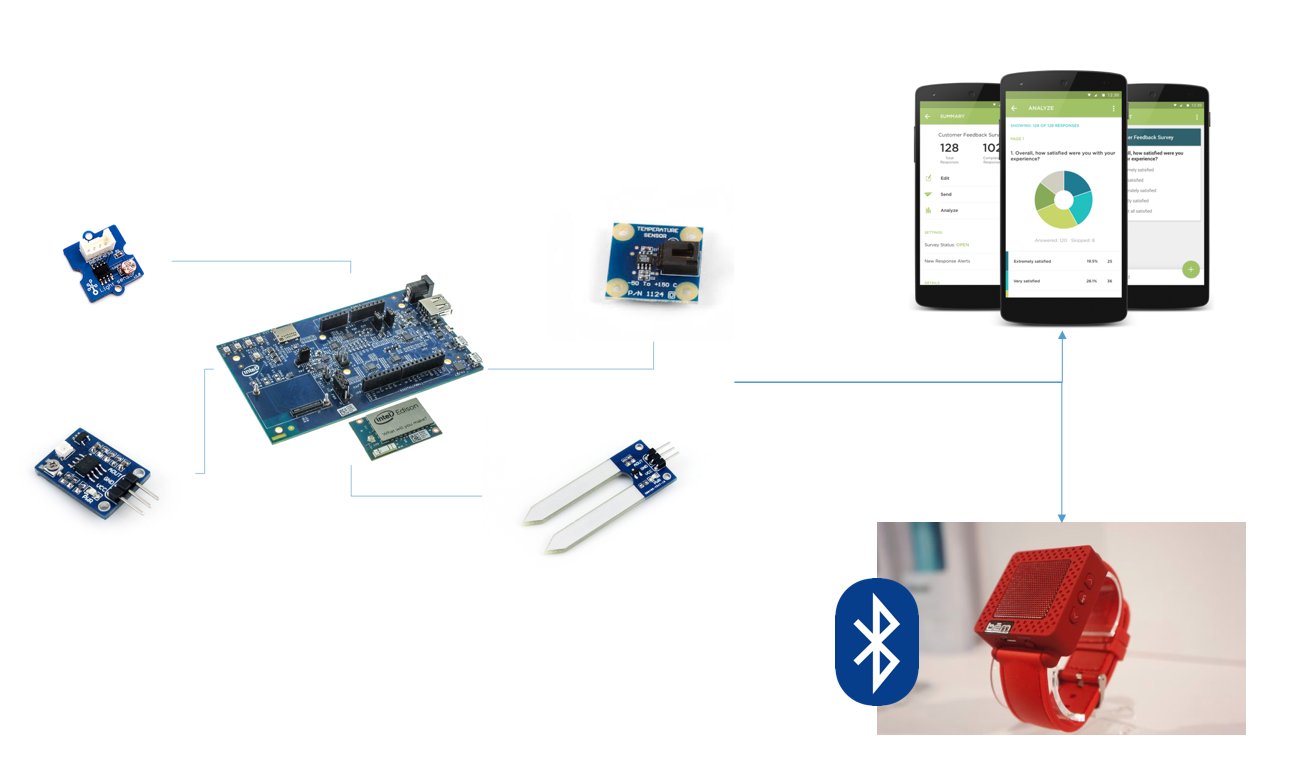
- Pair your Edison with the Bluetooth watch
The code pushes data to the Bluetooth watch as well as your android app

















{kind=link}
{kind=link}
Comments