The motivation to make this project was countless times growing up I always got locked out of my house or locked my keys in the car. That is why we decided to create some sort of mechanism that will unlock a door when it senses movement.
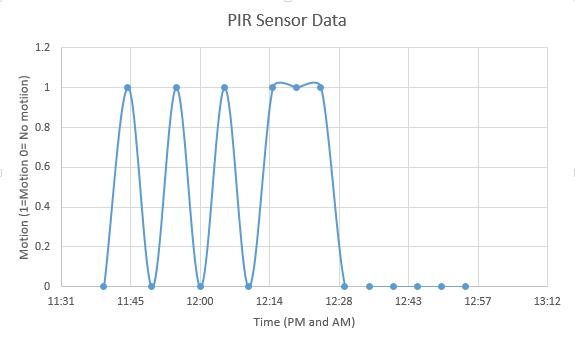
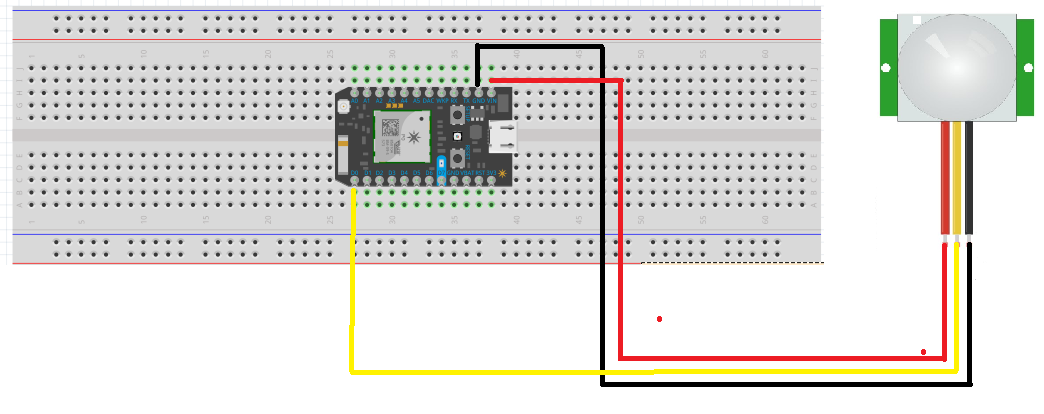
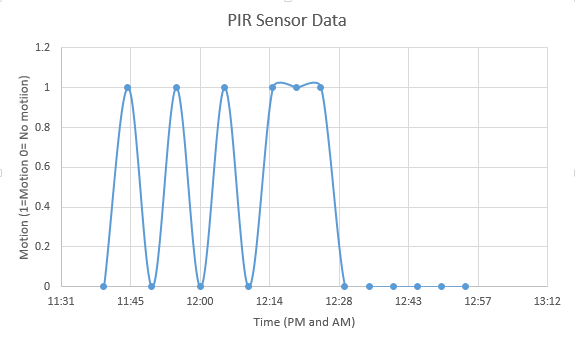
The first photon has a PIR sensor attached to it. This publishes and sends "movement" data to the second photon that motion has been detected.
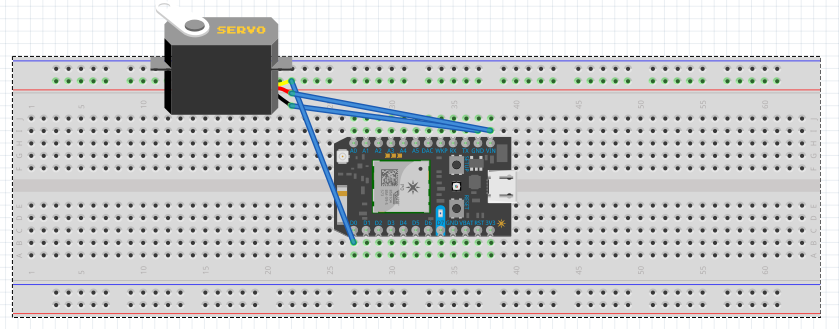
The second photon has the servo motor connected to it. This allows it to subscribe from the first photon and rotate at a designated angle from the servo motor. The angle can vary based on door knob to determine sufficient rotation to lock or unlock the door. There is also a time delay on it to re-lock the door after a certain amount of time has passed.
This support was completely made out of Legos. We decided to not damage the door or add any modifications. So instead we had a little fun and made a support out of Legos and used a strong adhesive tape to attach on the door.
With this project we will be able to unlock a door without touching the lock. We decided to do this project because I have been locked out of my house to many times to even count on my hands. It utilizes a publish & subscribe function to send data from 1 photon to another. When the PIR sensor senses movement it sends that information to the other photon and the second photon turns the servo motor to unlock the door. A few seconds later it locks the door again just in case. This is all shown in the script below.












{kind=link}
{kind=link}
{kind=link}
Comments