


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
Designer: Lonnie Sexton
Code Writers: Lonnie Sexton, Brandon Mutari & Julia Burlingham.
Hello world!
I would like to share this project I've been working using for over a year now. Pulling thousands of 22awg wires 8ft long off a 5000ft spool is no fun task. It's boring, it's prone to inaccuracy, it's boring, it takes 2 people 2 days to manually pull 706 22awg wires and it's boring. If you only have 1 spool (pulling 1 wire at a time) it takes much longer. With the Feed n Cut, you can just enter the desired length and quantity and presto, no lame tasks.
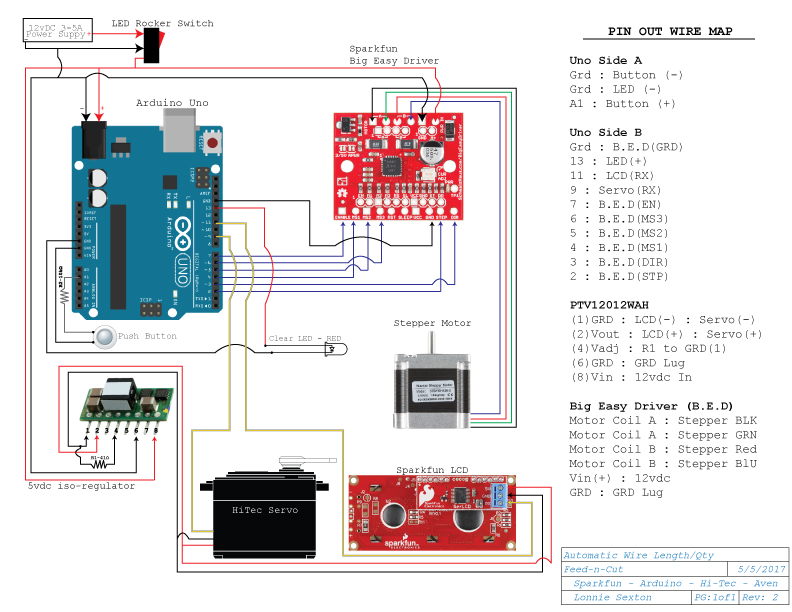
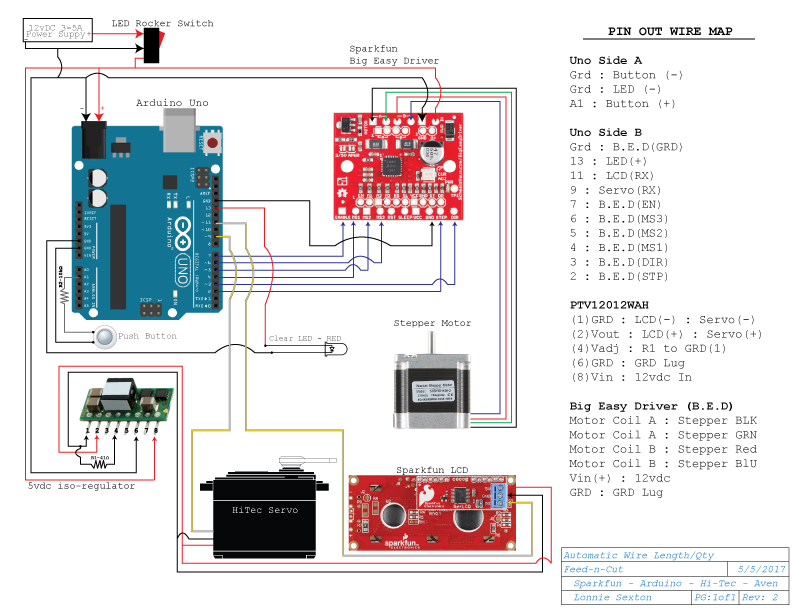
The Wiring Schematic hookup.
Click Here ==> (PDF) = Printable hook up chart.
I built the enclosure from poly-carbonate.250" thick sheets. They were recycled from an oil field product I saved from the going to a land fill.
The Sparkfun Bearing Holder Hubs (ROB-12328 x 4qty) are worth every penny.
Upright Bearing Hub ROB-12333
The wheel axles are from HPI On-Road RC Parts and the Sparkfun.250" OD - D-Shaft. Tapped the center at 6-32 and drilled a 1/16th pin hole.
ROB-12323 D-Shaft with 6-32 tap center
HPI Hex Hub
drilled 1/16th pin hole through the axle
Stepper Motor, T15 Pulleys.250"id
The Drive Wheel on bottom is connected to a nema 23 (200 step) 4 wire stepper motor and Sparkfun Big Easy Driver (An official by Brian S., not the cheap knock offs!). The driver, mounts, pulleys and motor are available from Sparkfun.
Stepper= ROB-13656; Pulleys = ROB-13597
Big Easy = ROB-12859
The top wheel or pitch wheel is pressed down by an HPI On-Road Shock.
Added a Sparkfun LCD 16x2 w/serial to display the state of the cycle. (LCD-09067)
This is just preparing for the 2nd phase of this project (Key Pad and LCD).
The cutter was made with a 1/4 scale servo (183torq oz per inch) and precision wire side cutters. I used some cable clamps to mount the cutters to the enclosure wall.
A short tool review...
I'm actually a little disappointed how easy is was to pull the handles off. Aven isn't the only guilty manufacturer if the handle slip issue. I've seen this from all the great tools. They can all do better. As for the cut produced they are A+. They shear the smallest awg wire smooth, no pinching. It's important when prepping small wires for exact fit into gold crimp pins.
Everbilt cable clamps converted to handle holders.
HiTec HS-755HB Servo ROB-12625
Aven Wire Cutters 10827F-ND
The Control Panel Top holds the LCD, Power Switch, Key Pad (not shown) and start button.
12 to 5 volt DC Isolated Regulator. The small PTV12010 come with 8 small leads coming off the bottom. I created this small break out board for easy access.
12vdc to 5vdc Iso-Regulator
I skinned the top with carbon replica adhesive wrap.
The last piece is the wire spool holder.
The funnel was used to capture the incoming wire off the spool
as it sways from side to side coming off the reel.
Barrel Plug for incoming DC Power.
Learning to code this was more of a task then building the mechanical, it actually took me longer. I knew what I wanted it to do long before I knew how to make it happen. I spent a good 3 weeks of reading forums, Arduino libraries, reference, guides, etc. Spent some time talking to co-workers and friends. Most of the time and frustration went into trial and error. I broke down the code into chucks I needed to learn and tackled them one bit at a time.
- Serial Input; taking a user input and storing it, and using it in functions.
- Operating the Stepper Motor and Big Easy Driver.
- Driving the stepper a certain number of steps.
- Operating the Servo was pretty easy, I had previous experience on another project.
- Operating the LCD. Sending display messages to the LCD. (more to come on this in later updates.)
- Counting down a certain number of cycles then start at the beginning.
It all went smooth, but I got stuck on the counting function for a good 2 weeks. After weeks of torture and triumph it came down to a Julia that spend about 10 minutes looking at my code and helped fix a couple placement issues. I greatly appreciate getting the help from a true code master = Julia B!
Hope you find the project inspiring or helpful. Thanks for stopping by and good luck makers!
Finished ProductSo far using this has been better than I could have planned. The accuracy is almost perfect. There is a small difference offset (+/-.125") at 96.00" (8ft).
Thank you for stopping by to check out the project.
<Exit>
Lonnie Sexton


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments