



Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 1 | |||
.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
Introduction:
This project was done by Sarah Aljishi and Hanin Elathram, mechanical engineering juniors, in the University of North Carolina at Charlotte as a part of their curriculum for MEGR 3171 during fall 2016.
The purpose of this project is to sense the motion in front of a house door, and lit the light bulbs to the guests and welcome them.
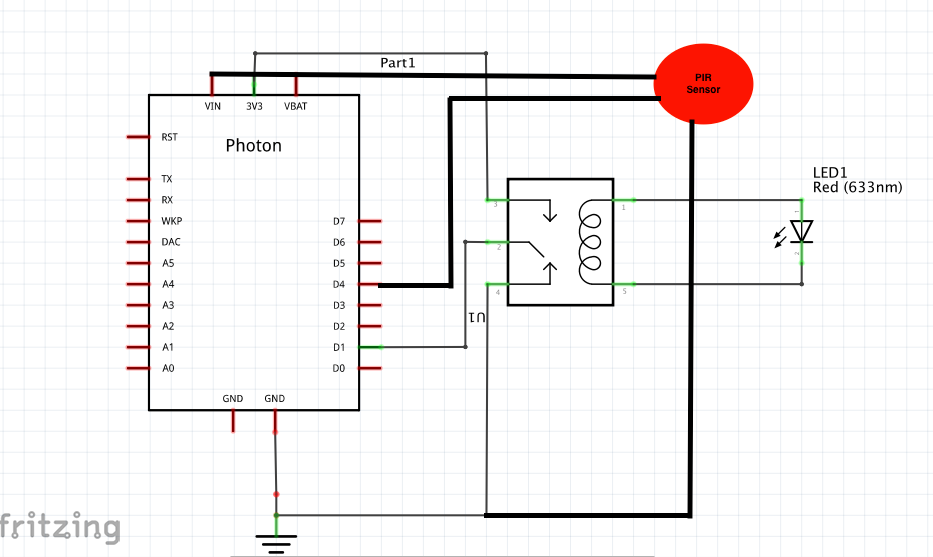
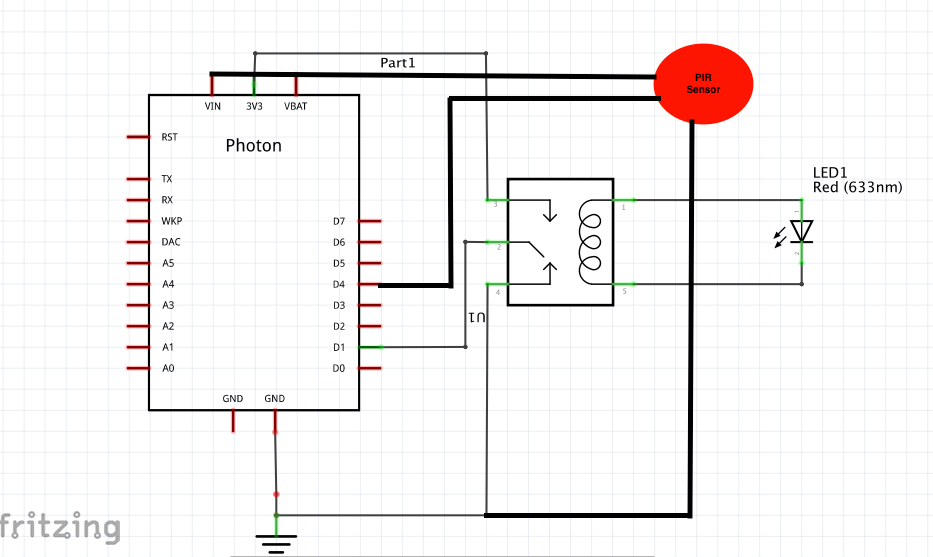
In the project, the used Microcontroller was a particle (photon). A PIR sensor was connected to the particle in a way that the data pin of the sensor was connected to pin D4 of the photon and VCC pin of the sensor was linked to the Vin of the particle, and GND pin of the sensor was connected to the particle ground.
A relay switch was connected in a way that its Vcc pin was connected to 3.3v pin of the particle, and its Vin pin was connected to D1 of the particle, and its GND pin was connected to the particle ground.
The light bulbs were connected to an extension cord that was linked to the relay through channel 1.
As someone passes through the motion sensor, a signal is sent to the LED from the motion sensor through the relay. After that, the light will turn on for two minutes, then it will turn off, and if there is no motion, there will be no light.
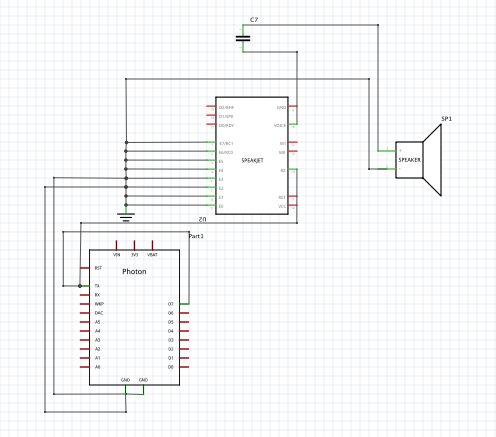
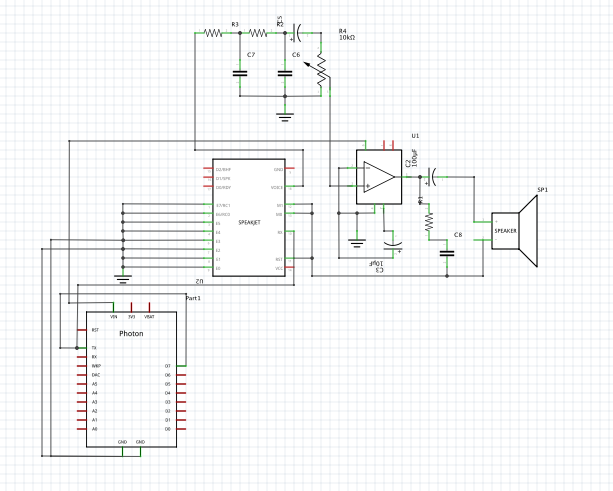
The second particle was connected to another circuit. The purpose of the second circuit was to send signals to a Speak jet letting it know that the LED was turned on, so the Speak jet can send signals to the mini speaker to say “Welcome.” Speak jet is a self-programmed (generator) device that gets an input order from a Microcontroller such as a particle in our case to apply the written code inserted in it. The spoken word “welcome” was inserted in the code based on its pronunciations and syllables. The word “Welcome” was represented by five numbers 147, 159, 194, 135 and 140. Each one of them represented a specific Sound Allophone as illustrated in the following:
- 147 = WW
- 159 =EHLL
- 194 = KE
- 135 = OH
- 140 = MM
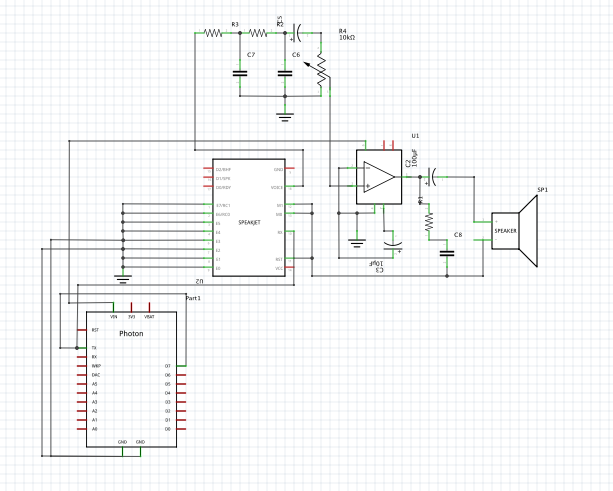
Going over the components of the second circuit, it consisted of particle and speak jet which we already mentioned their functions. Also, it consisted of two low pass filter circuits to get rid of the noise and unwanted signals by allowing the low-frequency signals to pass through them. After filtering the signal, the resulted output signal had a low amplitude than the original one, so an Audio amplifier LM386 was needed to amplify the signal, and pass it to an audio output device “Speaker”
An easier way to implement the circuit is by using MINI Speaker which has an internal amplifier inserted in it, and that is what we did.
Particle 1 and particle 2 were connected to each other by using subscribe and publish functions.
The following video demonstrates our project.
IF This Then That
Also, If This Then That was used to send SMS (short message service) to the user whenever someone stops at his/her front door as illustrated in the following graphs.
IF This Then That with a google drive spreadsheet was used to collect data during the day, and it was graphed as illustrated in the following.
The Led output had a value of one when there was a motion, and it was a zero when there was no motion. Also, you can see that the Led turned on for two minutes during the motion, and kept off when there was not any motion.










_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments