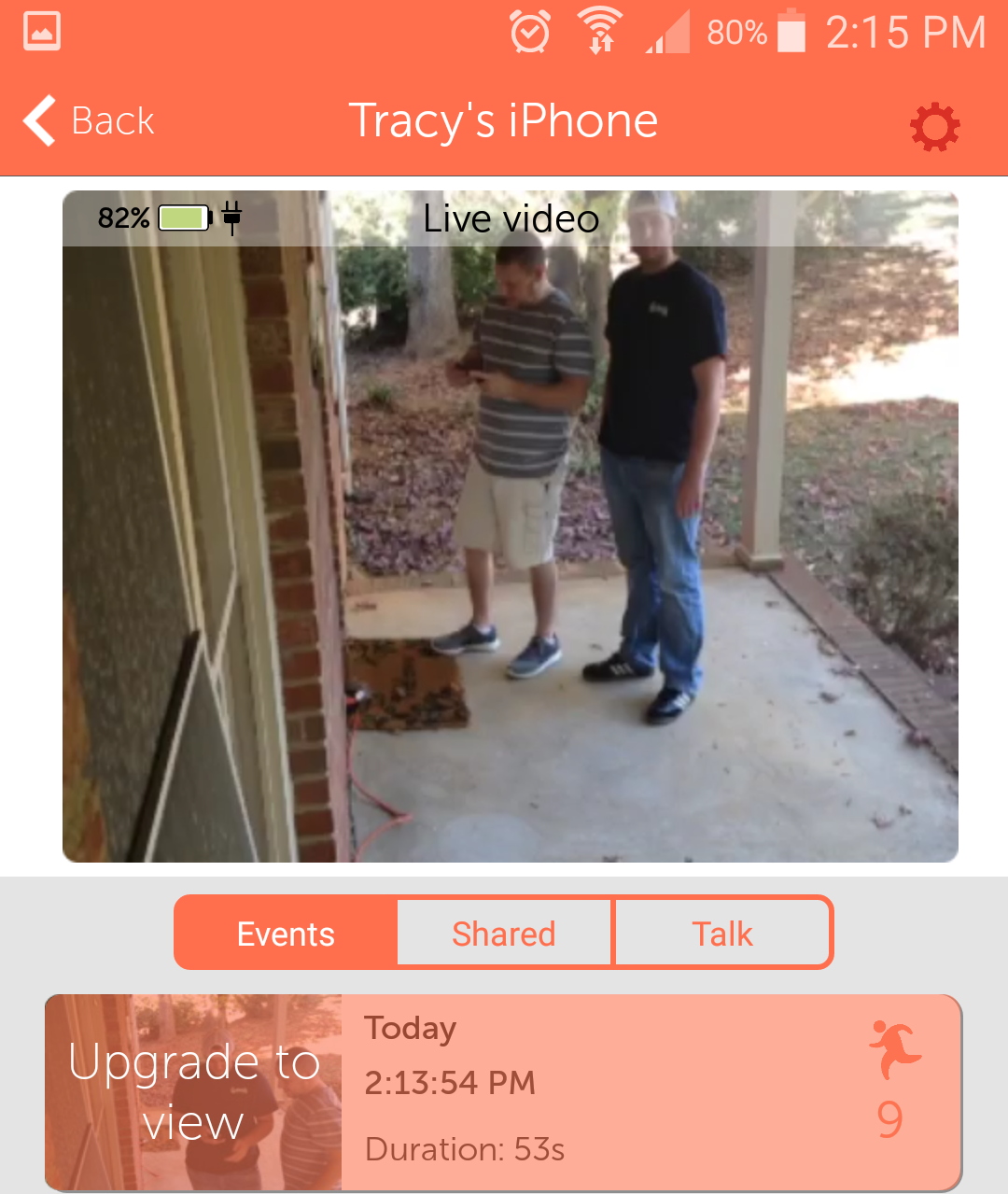
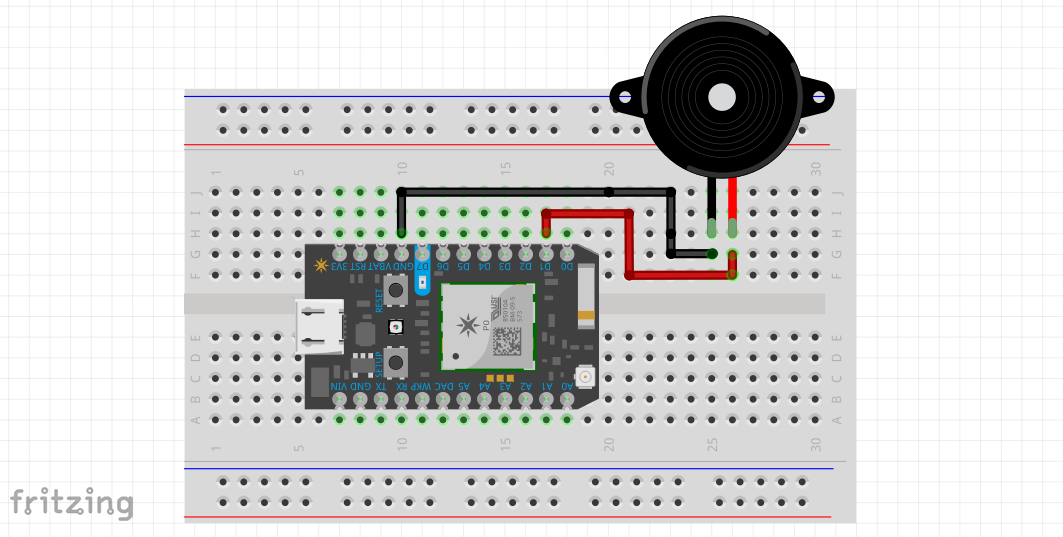
/* HC-SR04 Sensor, iPhone camera, 2x particle photon, blackweb battery brick, & piezo buzzer.
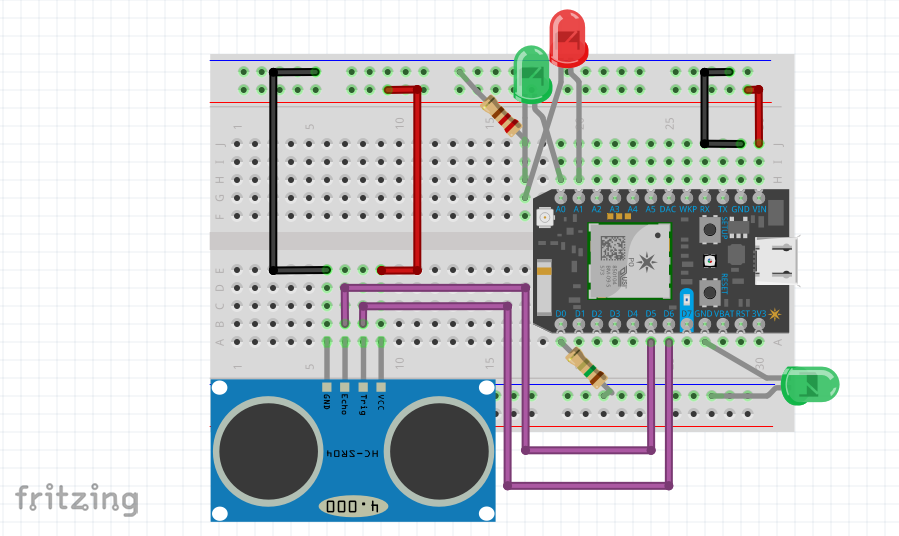
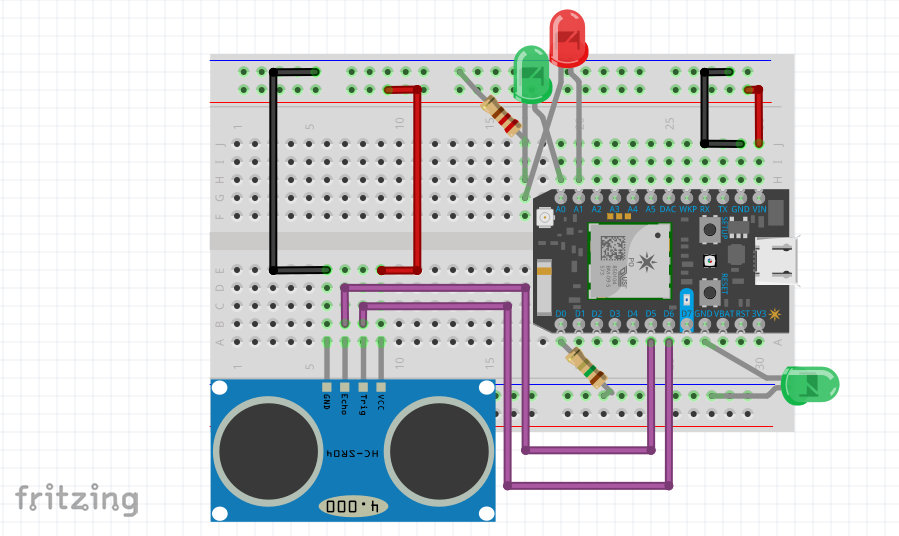
The circuit:
* VCC connection of the sensor attached to +5V (VIN)
* GND connection of the sensor attached to ground
* TRIG connection of the sensor attached to digital pin D6
* ECHO connection of the sensor attached to digital pin D5
rDPulsIn function by Ric from Particle Community
This example code is in the public domain.
*/
const int trigPin = D4;
const int echoPin = D3;
int k=0;
int traffic_counter=0;
int guest_counter=0;
unsigned long distance_in,duration,nowtime,looptime;
unsigned long duration2,duration3,duration4,duration5,duration6,duration7,duration8;
unsigned long distance_in2,distance_in3,distance_in4,distance_in5,distance_in6,distance_in7,distance_in8;
void setup() {
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(D0,OUTPUT);
pinMode(A0,OUTPUT);
pinMode(A1,OUTPUT);
Particle.variable("Distance-in", distance_in);
Particle.variable("pulseIn", duration);
Serial.begin(9600);
}
void loop()
{
nowtime=micros();
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
duration = rdPulseIn(echoPin, HIGH,29);
distance_in=duration/148;
/*The following if statement will publish events for people entering the driveway*/
/*A0 is an led that is also toggle so that by looking at the Particle we know the code has been tripped*/
/*Note that the rdPulseIn function returns 0 for any distance that 'timeouts'*/
/*Because the sensor gave false readings approximately 1 of 10 times... the next several if statements
repeatedly verify the measurement*/
if (distance_in>20&&distance_in<60)/*if statement #1*/
{
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
duration2 = rdPulseIn(echoPin, HIGH,29);
distance_in2=duration2/148;
Serial.print("1.1");
}/*end if statement #1*/
if (distance_in2>20&&distance_in2<60)/*if statement #2*/
{
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
duration3 = rdPulseIn(echoPin, HIGH,29);
distance_in3=duration3/148;
Serial.print("1.2");
}/*end if statement #2*/
if (distance_in3>20&&distance_in3<60)/*if statement #3*/
{
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
duration4 = rdPulseIn(echoPin, HIGH,29);
distance_in4=duration4/148;
Serial.print("1.3");
}/*end if statement #3*/
if (distance_in4>20&&distance_in4<60)/*if statement #4*/
{
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
duration5 = rdPulseIn(echoPin, HIGH,29);
distance_in5=duration5/148;
Serial.print("1.4");
}/*end if statement #4*/
if (distance_in5>20&&distance_in5<60)/*if statement #5*/
{
distance_in=distance_in5;
duration=duration5;
/*serial data for troubleshooting*/
Serial.print("1.5");
Serial.print("/Someone-is-in-the-drivewway/");
Serial.print("Distance=");
Serial.print(String(distance_in4));
Serial.print(duration);
Serial.println("Microseconds/");
guest_counter=guest_counter+1;
Particle.publish("Guest_at_Home","true");/*event published for 'IFTTT' (for email notification) and the second particle (for buzzer)*/
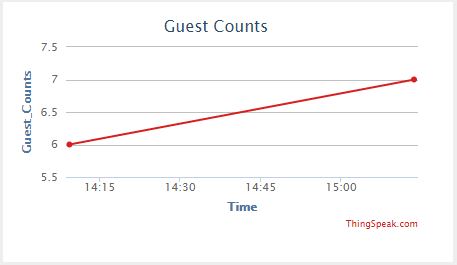
Particle.publish("Guest_Counts",String(guest_counter));/*event published for 'thingspeak' to graph data*/
/*The following line prevents one passing car from being counted twice*/
/*and lights an led to acknowledge visually that the particle code worked*/
digitalWrite(A1,HIGH);
delay(6000);
digitalWrite(A1,LOW);
/*The following if statement sends pulses to the power brick to keep it on*/
digitalWrite(D0,HIGH);
delay(250);
digitalWrite(D0,LOW);
}/*end if statement #5*/
/*The following if statement will publish events for traffic passing by*/
/*the sensor didn't give many false readings, if any, from this distance... the next three if statements
wil still reduce the probablity of getting a false reading as an extra precaution*/
else if (distance_in>60&&distance_in<170)/*if statement #1*/
{
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
duration6 = rdPulseIn(echoPin, HIGH,29);
distance_in6=duration6/148;
Serial.print("1.2.1");
}/*if statement #1*/
if (distance_in6>60&&distance_in6<170)/*if statement #2*/
{
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
duration7 = rdPulseIn(echoPin, HIGH,29);
distance_in7=duration7/148;
Serial.print("1.2.2");
}/*if statement #2*/
if (distance_in7>60&&distance_in7<170)/*if statement #3*/
{
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
duration8 = rdPulseIn(echoPin, HIGH,29);
distance_in8=duration8/148;
Serial.print("1.2.3");
}/*if statement #3*/
if (distance_in8>60&&distance_in8<170)/*if statement #4*/
{
distance_in=distance_in8;
/*serial data for troubleshooting*/
Serial.print("1.2.4");
Serial.print("/Traffic-passed-by/");
Serial.println("Microseconds=");
Serial.print(duration);
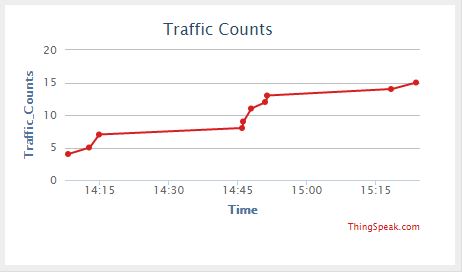
traffic_counter=traffic_counter+1;
Particle.publish("Plus_One_for_Traffic","true");
Particle.publish("Traffic_Counts",String(traffic_counter));/*event published for 'thingspeak' to graph data*/
/*The following line prevents one passing car from being counted twice*/
delay(2000);
/*The following if statement sends pulses to the power brick to keep it on*/
digitalWrite(D0,HIGH);
delay(250);
digitalWrite(D0,LOW);
}/*end if statement #4*/
/*The following if statement sends pulses at leasst every 20 seconds to the power brick to keep it on*/
else if (Time.second()==0||Time.second()==20||Time.second()==40)
{
digitalWrite(D0,HIGH);
delay(250);
digitalWrite(D0,LOW);
}
/*The following if statement will restart the 'traffic' and 'guest' counters at midnight*/
if (Time.hour()==0&&Time.minute()==0)
{
traffic_counter=0;
guest_counter=0;
Serial.print(traffic_counter);
Serial.print(guest_counter);
}
looptime=micros()-nowtime;
Serial.print("/time to loop=");
Serial.print(looptime);
/*reinitialize variables*/
distance_in=0;
distance_in2=0;
distance_in3=0;
distance_in4=0;
distance_in5=0;
distance_in6=0;
distance_in7=0;
distance_in8=0;
}/*end of loop*/
/*!!!Below is the rdPulseIn function with a timeout specificaiton: in the event the sensor sees nothing it will timeout instead of continuing to wait and returning false measurements!!!*/
unsigned long rdPulseIn(int pin, int value, int timeout) { // the following comments assume that we're passing HIGH as value. timeout is in milliseconds
unsigned long now = micros();
while(pinReadFast(pin) == value) { // wait if pin is already HIGH when the function is called, but timeout if it never goes LOW
if (micros()-now > (timeout*1000)) {
duration=0;
return 0;
}
}
now = micros(); // could delete this line if you want only one timeout period from the start until the actual pulse width timing starts
while (pinReadFast(pin) != value) { // pin is LOW, wait for it to go HIGH befor we start timing, but timeout if it never goes HIGH within the timeout period
if (micros()-now > (timeout*1000)) {
duration=0;
return 0;
}
}
now = micros();
while (pinReadFast(pin) == value) { // start timing the HIGH pulse width, but time out if over timeout milliseconds
if (micros()-now > (timeout*1000)) {
duration=0;
return 0;
}
}
return micros() - now;
}


















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments