



Now click on run button to run the program. Code section and paste it to min.c of your project.
1. Fan
2 . Water Motor
When we switch on the cooler both parts start and consume electricity continuously. I have seen that the cooler grass it gets wet in 2 min after the water motor starts working and if we stops water motor it takes 2 min to Dry.
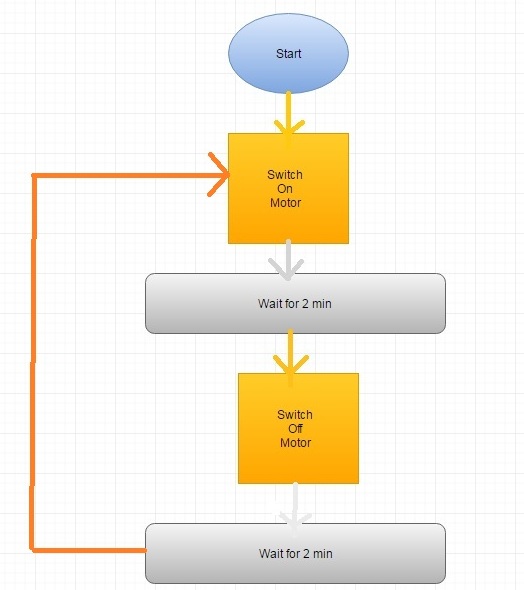
So if we switch on water motor for 2 mins, then switch off it for 2 min we can save electricity via this method.
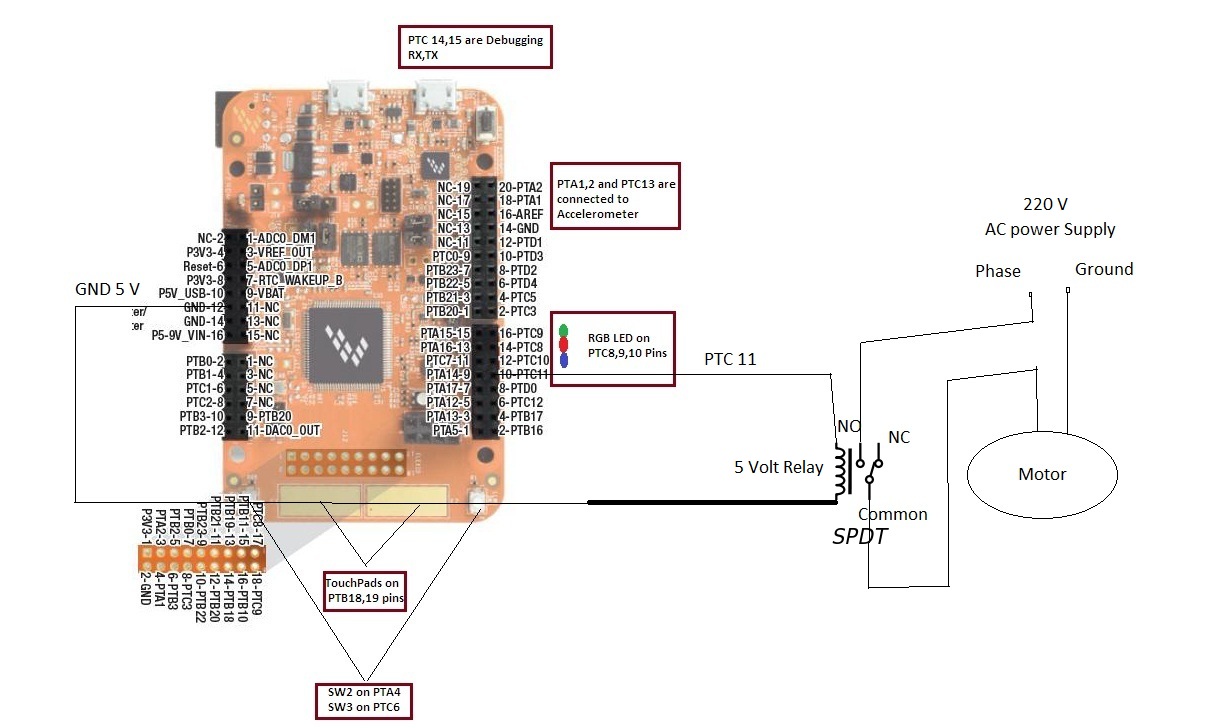
In this project we will use Freedom board (FRDM-K82F) as relay controller. Water motor will be connected through relay module. Freedom Board will switch on the water motor through PORTC pin 11 then wait for 2 mins then switch off motor for 2 min then switch on the motor and this will be continue.
Thus if we Run the Cooler for 8 hours , motor will be in working only for 4 hours and we will be able to save electricity.
Uploading the code into Freedom board from the start1. Open Kinetis Design Studio:
2. Click on FILE > NEW > KINETIS SDK 2.X PROJECT
3. Fill the project name
4. Click on finish
5. Project will be created
6. Double click on project
7. Project files and folders will be shown here
8. Double click on Source folder
9. Double click on main.c
10. Copy the code from main.c file n code section and paste it to min.c of your project
11. Now double click on board folder > pin_mux.c and copy the code from pin_mux.c file n code section and paste it to pin_mux.c of your project
12. Right click on your project folder or click the hammer like option to build it
13. Click on Build Project
14. Screen appears like it wait till completed
15. Now Click on debug option
16. Click on Debug Configurations..
17. Select your project name_Debug_segger in my case "electricity saver_Debug_segger"
18. Accept agreement and click on ok
19. Now click on run button to run the program on boar
Now connect the hardware part from fiure " Connection Diagram freedom board relay and motor" and save electricity.









{kind=link}
{kind=link}
Comments