















To design a grass-cutting robot that can be controlled through the Internet.
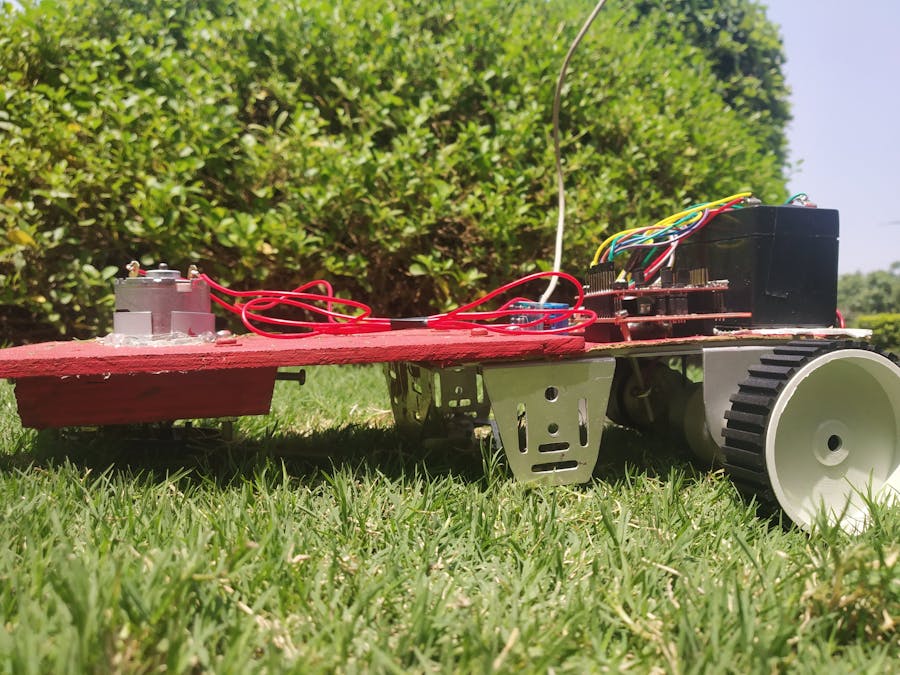
Block Diagram:We are controlling a grass cutter robot using internet and it also contains voice control system. We have developed the mobile application which send commands to the UBIDOTS server. MSP432 LaunchPad reads the data from the server using WiFi Booster Pack. The motor movement and different direction is governed by the program which is loaded to the launchpad credit.
The movement of robot is controlled keeping in view the following points:
❖ Variable1 : Forward
❖ Variable2 : Backward
❖ Variable3 : Left
❖ Variable4 : Right
❖ Variable5 : Stop
Advantages:❖ It contains a voice control system.
❖ It requires low maintenance.
❖ It is environment friendly as it contains battery instead of fossil fuels.
❖ It is safer to use because if any mishap occurs we can quickly give command to stop the robot.
❖ Now we are safety with no pollutants emitted.
❖ It will work via app as it does not need any gardener to cut the grass manually.
❖ The cost of electricity to recharge the battery is minimal compared to the high
cost of fossil fuels.
❖ Has less moving parts
❖ Less space required.
App Features:❖Build our own application which contain forward, backward, left, right buttons.
❖It also contain stop cutter, start cutter, stop robot buttons.
❖Voice module from MIT app inventor.
❖ It is used for household purposes like designing terrace garden, park etc.
❖ It is used for commercial purposes for designing lawns.
❖ It is used in agricultural fields to cut crops and grasses.
Limitations:❖ We need to modify robot (i.e. wheels) to operate in farms because the surface is
uneven.
❖ We can use solar energy panels instead of charging batteries.
❖ We have to increase the size of our grass cutter robot for farms, etc.
Demo Video:












Comments