



Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hey there!!
We will be trying to control a robot through user voice so lets get started with our project :
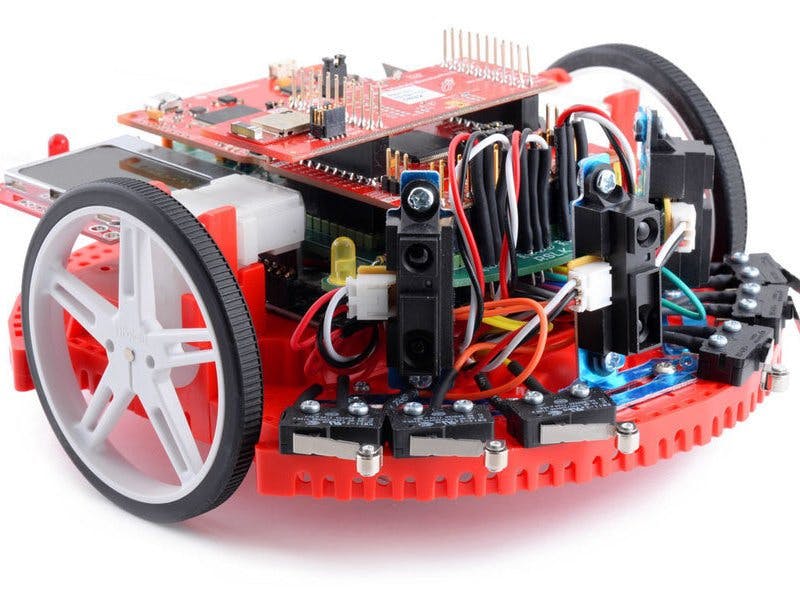
We will be making a robot that will accept user command and follow it accordingly.It is programmed in such a way that it will take certain commands like:START, STOP, LEFT, RIGHT, BACKWARD and FORWARD.For this we will be needing TI-RSLK. It contains MSP432 microcontroller, Pololu Board, chassis, tyres and motors.
MSP432 is a combination of MSP430 and ARM CORTEX architecture, a power supply of 7800mAh is given by Pololu board. The power can be distributed from 3.3V to 12V using Pololu board.Using Thunkable Classic (a platform on which mobile application can be made) a custom android application was created having 'Voice Recognization' tool in it which will automatically convert user voice to binary using Google Assistant and it will be transferred to the robot through a Bluetooth module. The bluetooth module will then communicate the binary message to the microcontroller using UART communication.
Microcontroller is programmed using Energia IDE. The programming language is based on C.
The video attached will demonstrate the working of the robot.
Happy Learning!!!





Comments