/*created by Mostafa Zaghloul with a helper library called RedBot.h you can find
* it on this link https://github.com/sparkfun/RedBot
*--------------------------- thanks a million ---------------------------------
*you can find me on
*FaceBook::https://www.facebook.com/mostafa.zaghlol3
*Twitter::https://twitter.com/Mostafazaghlul
*to Contact for hardware or software questions
*/
#include <RedBot.h>
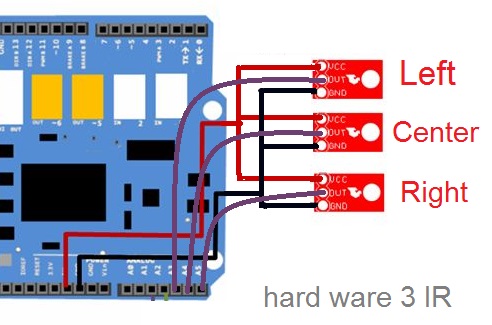
RedBotSensor left_sen = RedBotSensor(A3);
RedBotSensor center_sen = RedBotSensor(A4);
RedBotSensor right_sen = RedBotSensor(A5);
//data_sheet
// constants that are used in the code. lineStandard is the level to detect
// if the sensor is on the line or not. If the sensor value is greater than this
// the sensor is above a DARK line.
//
// SPEED sets the nominal speed
//motor A
#define en1 9
#define in1 4
#define in2 5
//motor b
#define en2 3
#define in3 6
#define in4 7
int lineStandard = 800;
void setup()
{ pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(en1, OUTPUT);
pinMode(en2, OUTPUT);
Serial.begin(9600);
Serial.println("IR Sensor Readings:: ");
delay(1000);
}
void loop()
{
Serial.print(left_sen.read());
Serial.print("\t");
Serial.print(center_sen.read());
Serial.print("\t");
Serial.print(right_sen.read());
Serial.println();
//data_sheet
// if on the line drive left and right at the same speed (left is CCW / right is CW)
if(center_sen.read() > lineStandard)
{//right
right();
}
//data_sheet
// if the line is under the right sensor, adjust relative speeds to turn to the right
else if(right_sen.read() > lineStandard)
{//left
left();
}
//data_sheet
// if the line is under the left sensor, adjust relative speeds to turn to the left
else if(left_sen.read() > lineStandard)
{//right
right();
}
//data_sheet
// if all sensors are on black or up in the air, stop the motors.
// otherwise, run motors given the control speeds above.
if((left_sen.read() > lineStandard) && (center_sen.read() > lineStandard) && (right_sen.read() > lineStandard) )
{
//stop
Stop ();
}
else
{
//any dir
forward();
}
delay(0); // add a delay to decrease sensitivity.
}
void right() {
analogWrite(en1,255);
analogWrite(en2,255);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void Stop () {
analogWrite(en1, 0);
analogWrite(en2, 0);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void left() {
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void forward() {
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void back(){
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, LOW);
digitalWrite(in2,HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}






_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
Comments