



Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 2 | ||||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
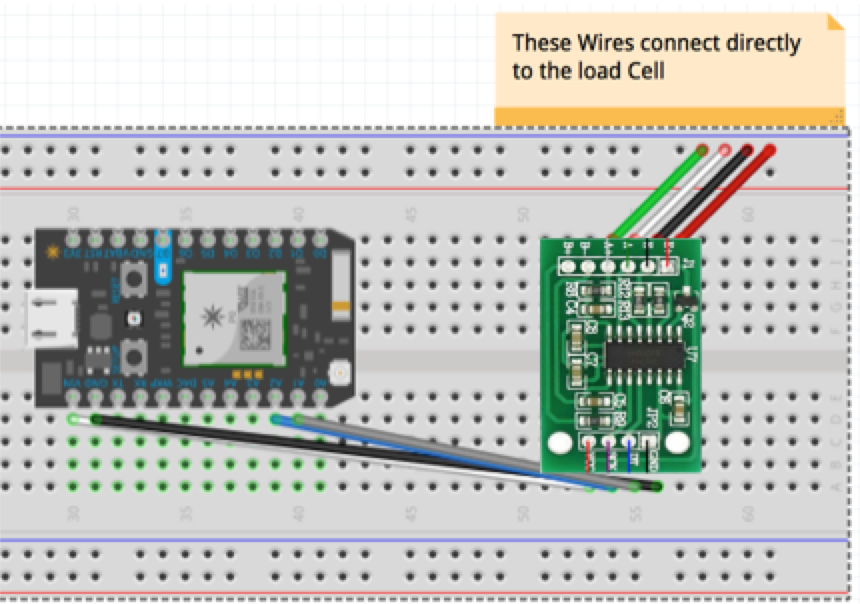
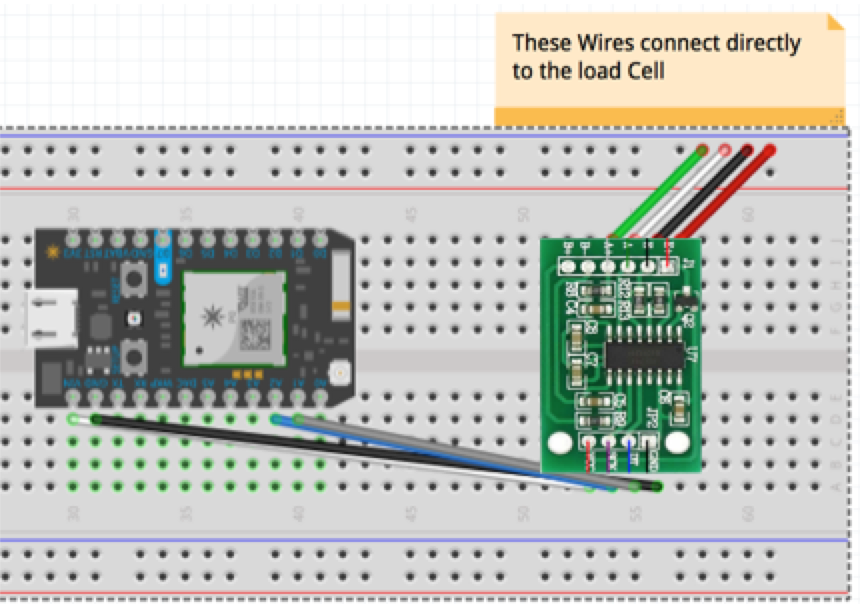
For our IOT project, we decided to design and create a dog food bowl that weighs with a scale how much dog food is left in the bowl and alerts the user via a text message if the bowl needs to be filled. When the dog food bowl is low on food, the photon connected to the bowl sends a message to another photon and scale that has a bag of dog food on it. This photon weighs how much dog food is in the bag. This information is then relayed back to the first photon (i.e two way communication) and a text message is sent to the user that either says that the bowl needs to be refilled or a new bag needs to be bought. The scales were made by using a load cell and a Hx711 chip that connected the load cell to the photon (see schematic). Everything was then connected to a metal housing and a case was then 3D printed to make the scale look clean and presentable. Both scales were made identically.
After the hardware was assembled, the photons were then programmed to read the scale values and communicate with each other, via subscribe and publish, a value based on what is needed. This published value was then sent to “If This Then That” (IFTTT) which allows a published data point to trigger a text message that is sent out based on the data point. The base code was an open source code from "Jaybuilder" on Instructables.com, the original code was used for a scale that could use an app on your phone to display the value. Extra code was added to this to allow for the publishing of data to the cloud and for bi-directional communication. Should the scale with the dog food bowl fall below a threshold of 100 g, that scale will publish "bad" to the cloud. The scale with the bag of food will push push the status "good" to the cloud when the weight is above 1 kg. When the bowl scale sees "good" it checks it's weight and if it is below the threshold it will publish "Feed Me." Similarly when the bag scale sees "bad" it will check its weight and, if it is below the threshold, then it will publish "Buy Food." Without 2-way communication between the photons, this project would have been impossible.
Overall, this project was very challenging but also very rewarding. Neither of us had any programming experience prior to this project so learning how to code a photon was a real challenge. The project was rewarding however because our struggles created something tangible that can have a function in the real world.
After we got the system working, we tested the scales in the real world with my dog over a week long period. As you can see in the real time graph below, the system worked to perfection. The photons were instructed to take a reading at 8 am and 8 pm everyday and text alerts were sent to the users phone every time the bowl needed to be refilled or the bag needed to be replaced. (Note: I intentionally left my bag of dog food a quarter full to test the scale, hence why the real time graph says the bag needs to be refilled twice. Also, I have a small dog and a bowl that holds food for around 2 days, which is why we got the "feed me" notification only 4 times throughout the week.)
#include <HX711ADC.h>
#include "Adafruit_SSD1306.h"
#define OLED_RESET D4
Adafruit_SSD1306 display(OLED_RESET);
#define LOGO16_GLCD_HEIGHT 16
#define LOGO16_GLCD_WIDTH 16
#if (SSD1306_LCDHEIGHT != 64)
#error("Height incorrect, please fix Adafruit_SSD1306.h!");
#endif
//HX711 Pin Hookup
#define SCK A3
#define DT A2
//Initialize scale
HX711ADC scale(DT,SCK);
double prevScaleValue;
double scaleValue;
double fullWeight = 100;
double lockWeight;
bool locked = false;
int lockedInt = 0;
bool updatePrev = true;
double seenWeight;
int numTimesSeen;
int tareScale(String command);
double absValue(double value);
int setFullWeight(String command);
int lockScale(String command);
bool flag = false;
void setup(){
Serial.begin(9600);
Particle.variable("scaleValue", scaleValue);
Particle.variable("lockedInt", lockedInt);
Particle.function("setFull", setFullWeight);
Particle.function("tareScale", tareScale);
Particle.function("lockScale", lockScale);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
display.display();
scale.set_scale(107.32);//Calibrates scale (See calibration instructions)
Serial.println(scale.get_units());
scale.tare();
Particle.subscribe("scaleValue2", myHandler, MY_DEVICES);
}
//checks subscrive data and sets flag based on scale value
void myHandler(const char *event, const char *data)
{
if(strcmp(String(data),"good")==0 && scaleValue < 100){
flag=true;}
else if(strcmp(String(data),"good")==0 && scaleValue > 100){
flag=false;
}
}
void loop(){
scale.power_up();
//Check for a change in weight and send event
if(scaleValue > prevScaleValue+2 || scaleValue < prevScaleValue - 2){
Particle.publish("weightChange",String(scaleValue), PRIVATE);
}
if(locked && (scaleValue > prevScaleValue +2 || scaleValue < prevScaleValue -2)){
updatePrev = false;
numTimesSeen++;
if(numTimesSeen >=2){
updatePrev = true;
numTimesSeen = 0;
Particle.publish("lockWtChange");
}
}
//Get new Readings
if(updatePrev){
prevScaleValue = scaleValue;
}
scaleValue = scale.get_units(5);
scaleValue = absValue(scaleValue);
//Update Display
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printf("Wt:%2d g", (int)scaleValue);
display.setTextSize(1);
display.printf("\n\nFull: %2d g", (int)fullWeight);
if(locked){
display.printf("\n\n\nLocked at %2d g", (int)lockWeight);
}
display.display();
delay(1000);
//checks scale value and publishes to the cloud
if(scaleValue < 100){
Particle.publish("scaleValue1","bad",PRIVATE);
//publish flag data for trouble shooting
Particle.publish("flag", String(flag), PRIVATE);
}
//checks for flag status and reports to the cloud
if(flag==true){
Particle.publish("Feed Me",String(scaleValue)+"g");
}
//Serial.print(scaleValue);Serial.println("g");
scale.power_down();
//delay(43200000);
int startTime = millis();
while(true){
if(millis()-startTime >= 43200000){
break;
}
}
}
int tareScale(String command){
scale.tare();
delay(100);
Serial.println("Scale Teared From Cloud!!");
return 1;
}
int setFullWeight(String command){
fullWeight = scaleValue;
return fullWeight;
}
int lockScale(String command){
locked = !locked;
lockWeight = scaleValue;
if(locked){
lockedInt = 1;
return lockWeight;
}else{
lockedInt = 0;
return -1;
}
}
//Not really working right now
double absValue(double value){
double newValue = 0;
if(value < 0){
newValue = -1*value;
return newValue;
}
return value;
}
#include <HX711ADC.h>
#include "Adafruit_SSD1306.h"
#define OLED_RESET D4
Adafruit_SSD1306 display(OLED_RESET);
#define LOGO16_GLCD_HEIGHT 16
#define LOGO16_GLCD_WIDTH 16
#if (SSD1306_LCDHEIGHT != 64)
#error("Height incorrect, please fix Adafruit_SSD1306.h!");
#endif
//HX711 Pin Hookup
#define SCK A3
#define DT A2
//Initialize scale
HX711ADC scale(DT,SCK);
double prevScaleValue;
double scaleValue;
double fullWeight = 100;
double lockWeight;
bool locked = false;
int lockedInt = 0;
bool updatePrev = true;
double seenWeight;
int numTimesSeen;
int tareScale(String command);
double absValue(double value);
int setFullWeight(String command);
int lockScale(String command);
bool flag=false;
void setup(){
Serial.begin(9600);
Particle.variable("scaleValue", scaleValue);
Particle.variable("lockedInt", lockedInt);
Particle.function("setFull", setFullWeight);
Particle.function("tareScale", tareScale);
Particle.function("lockScale", lockScale);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
display.display();
scale.set_scale(107.32);//Calibrates scale (See calibration instructions)
Serial.println(scale.get_units());
scale.tare();
Particle.subscribe("scaleValue1", myHandler, MY_DEVICES);
}
//checks the subscribe data and sets the flag based on the scale value
void myHandler(const char *event, const char *data)
{
if(strcmp(String(data),"bad")==0 && scaleValue < 1000){
flag=true;}
else if(strcmp(String(data),"bad")==0 && scaleValue > 1000){
flag=false;
}
}
void loop(){
scale.power_up();
//Check for a change in weight and send event
if(scaleValue > prevScaleValue+2 || scaleValue < prevScaleValue - 2){
Particle.publish("weightChange", String(scaleValue), PRIVATE);
}
if(locked && (scaleValue > prevScaleValue +2 || scaleValue < prevScaleValue -2)){
updatePrev = false;
numTimesSeen++;
if(numTimesSeen >=2){
updatePrev = true;
numTimesSeen = 0;
Particle.publish("lockWtChange");
}
}
//Get new Readings
if(updatePrev){
prevScaleValue = scaleValue;
}
scaleValue = scale.get_units(5);
scaleValue = absValue(scaleValue);
//Update Display
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printf("Wt:%2d g", (int)scaleValue);
display.setTextSize(1);
display.printf("\n\nFull: %2d g", (int)fullWeight);
if(locked){
display.printf("\n\n\nLocked at %2d g", (int)lockWeight);
}
display.display();
delay(1000);
//Checks for the weight of the bag of dog food
if(scaleValue > 1000){
Particle.publish("scaleValue2","good",PRIVATE);
//publish tag value for troubleshooting
Particle.publish("flag", String(flag), PRIVATE);
}
//publish the buy food command if the flag is true
if(flag==true){
Particle.publish("Buy Food",String(scaleValue)+"g");
}
//Serial.print(scaleValue);Serial.println("g");
scale.power_down();
//delay(43200000);
int startTime = millis();
while(true){
if(millis()-startTime >= 43200000){
break;
}
}
}
int tareScale(String command){
scale.tare();
delay(100);
Serial.println("Scale Teared From Cloud!!");
return 1;
}
int setFullWeight(String command){
fullWeight = scaleValue;
return fullWeight;
}
int lockScale(String command){
locked = !locked;
lockWeight = scaleValue;
if(locked){
lockedInt = 1;
return lockWeight;
}else{
lockedInt = 0;
return -1;
}
}
//Not really working right now
double absValue(double value){
double newValue = 0;
if(value < 0){
newValue = -1*value;
return newValue;
}
return value;
}
/*********************************************************************
This is a library for our Monochrome OLEDs based on SSD1306 drivers
Pick one up today in the adafruit shop!
------> http://www.adafruit.com/category/63_98
These displays use SPI to communicate, 4 or 5 pins are required to
interface
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, check license.txt for more information
All text above, and the splash screen below must be included in any redistribution
*********************************************************************/
#include "Adafruit_GFX.h"
#include "Adafruit_SSD1306.h"
// the memory buffer for the LCD
static uint8_t buffer[SSD1306_LCDHEIGHT * SSD1306_LCDWIDTH / 8] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80,
0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x80, 0x80, 0xC0, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x80, 0xC0, 0xE0, 0xF0, 0xF8, 0xFC, 0xF8, 0xE0, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80,
0x80, 0x80, 0x00, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x00, 0xFF,
0xFF, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0x80, 0x80, 0x00, 0x00,
0x80, 0xFF, 0xFF, 0x80, 0x80, 0x00, 0x80, 0x80, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x80, 0x80,
0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x00, 0x00, 0x8C, 0x8E, 0x84, 0x00, 0x00, 0x80, 0xF8,
0xF8, 0xF8, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0xF0, 0xF0, 0xF0, 0xF0, 0xF0, 0xF0, 0xF0, 0xF0, 0xF0, 0xF0, 0xF0, 0xF0, 0xE0, 0xE0, 0xC0, 0x80,
0x00, 0xE0, 0xFC, 0xFE, 0xFF, 0xFF, 0xFF, 0x7F, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFE, 0xFF, 0xC7, 0x01, 0x01,
0x01, 0x01, 0x83, 0xFF, 0xFF, 0x00, 0x00, 0x7C, 0xFE, 0xC7, 0x01, 0x01, 0x01, 0x01, 0x83, 0xFF,
0xFF, 0xFF, 0x00, 0x38, 0xFE, 0xC7, 0x83, 0x01, 0x01, 0x01, 0x83, 0xC7, 0xFF, 0xFF, 0x00, 0x00,
0x01, 0xFF, 0xFF, 0x01, 0x01, 0x00, 0xFF, 0xFF, 0x07, 0x01, 0x01, 0x01, 0x00, 0x00, 0x7F, 0xFF,
0x80, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0x7F, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0x01, 0xFF,
0xFF, 0xFF, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x03, 0x0F, 0x3F, 0x7F, 0x7F, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xE7, 0xC7, 0xC7, 0x8F,
0x8F, 0x9F, 0xBF, 0xFF, 0xFF, 0xC3, 0xC0, 0xF0, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFC, 0xFC, 0xFC,
0xFC, 0xFC, 0xFC, 0xFC, 0xFC, 0xF8, 0xF8, 0xF0, 0xF0, 0xE0, 0xC0, 0x00, 0x01, 0x03, 0x03, 0x03,
0x03, 0x03, 0x01, 0x03, 0x03, 0x00, 0x00, 0x00, 0x00, 0x01, 0x03, 0x03, 0x03, 0x03, 0x01, 0x01,
0x03, 0x01, 0x00, 0x00, 0x00, 0x01, 0x03, 0x03, 0x03, 0x03, 0x01, 0x01, 0x03, 0x03, 0x00, 0x00,
0x00, 0x03, 0x03, 0x00, 0x00, 0x00, 0x03, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01,
0x03, 0x03, 0x03, 0x03, 0x03, 0x01, 0x00, 0x00, 0x00, 0x01, 0x03, 0x01, 0x00, 0x00, 0x00, 0x03,
0x03, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
#if (SSD1306_LCDHEIGHT == 64)
0x00, 0x00, 0x00, 0x80, 0xC0, 0xE0, 0xF0, 0xF9, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x3F, 0x1F, 0x0F,
0x87, 0xC7, 0xF7, 0xFF, 0xFF, 0x1F, 0x1F, 0x3D, 0xFC, 0xF8, 0xF8, 0xF8, 0xF8, 0x7C, 0x7D, 0xFF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F, 0x3F, 0x0F, 0x07, 0x00, 0x30, 0x30, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0xFE, 0xFE, 0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xE0, 0xC0, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x30, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0xC0, 0xFE, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F, 0x7F, 0x3F, 0x1F,
0x0F, 0x07, 0x1F, 0x7F, 0xFF, 0xFF, 0xF8, 0xF8, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFE, 0xF8, 0xE0,
0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFE, 0xFE, 0x00, 0x00,
0x00, 0xFC, 0xFE, 0xFC, 0x0C, 0x06, 0x06, 0x0E, 0xFC, 0xF8, 0x00, 0x00, 0xF0, 0xF8, 0x1C, 0x0E,
0x06, 0x06, 0x06, 0x0C, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0xFE, 0xFE, 0x00, 0x00, 0x00, 0x00, 0xFC,
0xFE, 0xFC, 0x00, 0x18, 0x3C, 0x7E, 0x66, 0xE6, 0xCE, 0x84, 0x00, 0x00, 0x06, 0xFF, 0xFF, 0x06,
0x06, 0xFC, 0xFE, 0xFC, 0x0C, 0x06, 0x06, 0x06, 0x00, 0x00, 0xFE, 0xFE, 0x00, 0x00, 0xC0, 0xF8,
0xFC, 0x4E, 0x46, 0x46, 0x46, 0x4E, 0x7C, 0x78, 0x40, 0x18, 0x3C, 0x76, 0xE6, 0xCE, 0xCC, 0x80,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x01, 0x07, 0x0F, 0x1F, 0x1F, 0x3F, 0x3F, 0x3F, 0x3F, 0x1F, 0x0F, 0x03,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0x0F, 0x00, 0x00,
0x00, 0x0F, 0x0F, 0x0F, 0x00, 0x00, 0x00, 0x00, 0x0F, 0x0F, 0x00, 0x00, 0x03, 0x07, 0x0E, 0x0C,
0x18, 0x18, 0x0C, 0x06, 0x0F, 0x0F, 0x0F, 0x00, 0x00, 0x01, 0x0F, 0x0E, 0x0C, 0x18, 0x0C, 0x0F,
0x07, 0x01, 0x00, 0x04, 0x0E, 0x0C, 0x18, 0x0C, 0x0F, 0x07, 0x00, 0x00, 0x00, 0x0F, 0x0F, 0x00,
0x00, 0x0F, 0x0F, 0x0F, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0x0F, 0x00, 0x00, 0x00, 0x07,
0x07, 0x0C, 0x0C, 0x18, 0x1C, 0x0C, 0x06, 0x06, 0x00, 0x04, 0x0E, 0x0C, 0x18, 0x0C, 0x0F, 0x07,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
#endif
};
// the most basic function, set a single pixel
void Adafruit_SSD1306::drawPixel(int16_t x, int16_t y, uint16_t color) {
if ((x < 0) || (x >= width()) || (y < 0) || (y >= height()))
return;
// check rotation, move pixel around if necessary
switch (getRotation()) {
case 1:
swap(x, y);
x = WIDTH - x - 1;
break;
case 2:
x = WIDTH - x - 1;
y = HEIGHT - y - 1;
break;
case 3:
swap(x, y);
y = HEIGHT - y - 1;
break;
}
// x is which column
if (color == WHITE)
buffer[x+ (y/8)*SSD1306_LCDWIDTH] |= (1 << (y&7));
else
buffer[x+ (y/8)*SSD1306_LCDWIDTH] &= ~(1 << (y&7));
}
// constructor for software SPI - we indicate DataCommand, ChipSelect, Reset
Adafruit_SSD1306::Adafruit_SSD1306(int8_t SID, int8_t SCLK, int8_t DC, int8_t RST, int8_t CS) : Adafruit_GFX(SSD1306_LCDWIDTH, SSD1306_LCDHEIGHT) {
cs = CS;
rst = RST;
dc = DC;
sclk = SCLK;
sid = SID;
hwSPI = false;
}
// constructor for hardware SPI - we indicate DataCommand, ChipSelect, Reset
Adafruit_SSD1306::Adafruit_SSD1306(int8_t DC, int8_t RST, int8_t CS) : Adafruit_GFX(SSD1306_LCDWIDTH, SSD1306_LCDHEIGHT) {
dc = DC;
rst = RST;
cs = CS;
hwSPI = true;
}
// initializer for I2C - we only indicate the reset pin!
Adafruit_SSD1306::Adafruit_SSD1306(int8_t reset) :
Adafruit_GFX(SSD1306_LCDWIDTH, SSD1306_LCDHEIGHT) {
sclk = dc = cs = sid = -1;
rst = reset;
}
void Adafruit_SSD1306::begin(uint8_t vccstate, uint8_t i2caddr) {
_vccstate = vccstate;
_i2caddr = i2caddr;
// set pin directions
if (sid != -1){
pinMode(dc, OUTPUT);
pinMode(cs, OUTPUT);
if (!hwSPI){
// set pins for software-SPI
pinMode(sid, OUTPUT);
pinMode(sclk, OUTPUT);
}
if (hwSPI){
digitalWrite(cs, HIGH);
SPI.setBitOrder(MSBFIRST);
SPI.setClockDivider(SPI_CLOCK_DIV8); // 72MHz / 8 = 9Mhz
SPI.setDataMode(0);
SPI.begin();
}
}
else
{
// I2C Init
Wire.begin();
}
// Setup reset pin direction (used by both SPI and I2C)
pinMode(rst, OUTPUT);
digitalWrite(rst, HIGH);
// VDD (3.3V) goes high at start, lets just chill for a ms
delay(1);
// bring reset low
digitalWrite(rst, LOW);
// wait 10ms
delay(10);
// bring out of reset
digitalWrite(rst, HIGH);
// turn on VCC (9V?)
#if defined SSD1306_128_32
// Init sequence for 128x32 OLED module
ssd1306_command(SSD1306_DISPLAYOFF); // 0xAE
ssd1306_command(SSD1306_SETDISPLAYCLOCKDIV); // 0xD5
ssd1306_command(0x80); // the suggested ratio 0x80
ssd1306_command(SSD1306_SETMULTIPLEX); // 0xA8
ssd1306_command(0x1F);
ssd1306_command(SSD1306_SETDISPLAYOFFSET); // 0xD3
ssd1306_command(0x0); // no offset
ssd1306_command(SSD1306_SETSTARTLINE | 0x0); // line #0
ssd1306_command(SSD1306_CHARGEPUMP); // 0x8D
if (vccstate == SSD1306_EXTERNALVCC)
{ ssd1306_command(0x10); }
else
{ ssd1306_command(0x14); }
ssd1306_command(SSD1306_MEMORYMODE); // 0x20
ssd1306_command(0x00); // 0x0 act like ks0108
ssd1306_command(SSD1306_SEGREMAP | 0x1);
ssd1306_command(SSD1306_COMSCANDEC);
ssd1306_command(SSD1306_SETCOMPINS); // 0xDA
ssd1306_command(0x02);
ssd1306_command(SSD1306_SETCONTRAST); // 0x81
ssd1306_command(0x8F);
ssd1306_command(SSD1306_SETPRECHARGE); // 0xd9
if (vccstate == SSD1306_EXTERNALVCC)
{ ssd1306_command(0x22); }
else
{ ssd1306_command(0xF1); }
ssd1306_command(SSD1306_SETVCOMDETECT); // 0xDB
ssd1306_command(0x40);
ssd1306_command(SSD1306_DISPLAYALLON_RESUME); // 0xA4
ssd1306_command(SSD1306_NORMALDISPLAY); // 0xA6
#endif
#if defined SSD1306_128_64
// Init sequence for 128x64 OLED module
ssd1306_command(SSD1306_DISPLAYOFF); // 0xAE
ssd1306_command(SSD1306_SETDISPLAYCLOCKDIV); // 0xD5
ssd1306_command(0x80); // the suggested ratio 0x80
ssd1306_command(SSD1306_SETMULTIPLEX); // 0xA8
ssd1306_command(0x3F);
ssd1306_command(SSD1306_SETDISPLAYOFFSET); // 0xD3
ssd1306_command(0x0); // no offset
ssd1306_command(SSD1306_SETSTARTLINE | 0x0); // line #0
ssd1306_command(SSD1306_CHARGEPUMP); // 0x8D
if (vccstate == SSD1306_EXTERNALVCC)
{ ssd1306_command(0x10); }
else
{ ssd1306_command(0x14); }
ssd1306_command(SSD1306_MEMORYMODE); // 0x20
ssd1306_command(0x00); // 0x0 act like ks0108
ssd1306_command(SSD1306_SEGREMAP | 0x1);
ssd1306_command(SSD1306_COMSCANDEC);
ssd1306_command(SSD1306_SETCOMPINS); // 0xDA
ssd1306_command(0x12);
ssd1306_command(SSD1306_SETCONTRAST); // 0x81
if (vccstate == SSD1306_EXTERNALVCC)
{ ssd1306_command(0x9F); }
else
{ ssd1306_command(0xCF); }
ssd1306_command(SSD1306_SETPRECHARGE); // 0xd9
if (vccstate == SSD1306_EXTERNALVCC)
{ ssd1306_command(0x22); }
else
{ ssd1306_command(0xF1); }
ssd1306_command(SSD1306_SETVCOMDETECT); // 0xDB
ssd1306_command(0x40);
ssd1306_command(SSD1306_DISPLAYALLON_RESUME); // 0xA4
ssd1306_command(SSD1306_NORMALDISPLAY); // 0xA6
#endif
ssd1306_command(SSD1306_DISPLAYON);//--turn on oled panel
}
void Adafruit_SSD1306::invertDisplay(uint8_t i) {
if (i) {
ssd1306_command(SSD1306_INVERTDISPLAY);
} else {
ssd1306_command(SSD1306_NORMALDISPLAY);
}
}
void Adafruit_SSD1306::ssd1306_command(uint8_t c) {
if (sid != -1)
{
// SPI
digitalWrite(cs, HIGH);
digitalWrite(dc, LOW);
digitalWrite(cs, LOW);
fastSPIwrite(c);
digitalWrite(cs, HIGH);
}
else
{
// I2C
uint8_t control = 0x00; // Co = 0, D/C = 0
Wire.beginTransmission(_i2caddr);
Wire.write(control);
Wire.write(c);
Wire.endTransmission();
}
}
// startscrollright
// Activate a right handed scroll for rows start through stop
// Hint, the display is 16 rows tall. To scroll the whole display, run:
// display.scrollright(0x00, 0x0F)
void Adafruit_SSD1306::startscrollright(uint8_t start, uint8_t stop){
ssd1306_command(SSD1306_RIGHT_HORIZONTAL_SCROLL);
ssd1306_command(0X00);
ssd1306_command(start);
ssd1306_command(0X00);
ssd1306_command(stop);
ssd1306_command(0X00);
ssd1306_command(0XFF);
ssd1306_command(SSD1306_ACTIVATE_SCROLL);
}
// startscrollleft
// Activate a right handed scroll for rows start through stop
// Hint, the display is 16 rows tall. To scroll the whole display, run:
// display.scrollright(0x00, 0x0F)
void Adafruit_SSD1306::startscrollleft(uint8_t start, uint8_t stop){
ssd1306_command(SSD1306_LEFT_HORIZONTAL_SCROLL);
ssd1306_command(0X00);
ssd1306_command(start);
ssd1306_command(0X00);
ssd1306_command(stop);
ssd1306_command(0X00);
ssd1306_command(0XFF);
ssd1306_command(SSD1306_ACTIVATE_SCROLL);
}
// startscrolldiagright
// Activate a diagonal scroll for rows start through stop
// Hint, the display is 16 rows tall. To scroll the whole display, run:
// display.scrollright(0x00, 0x0F)
void Adafruit_SSD1306::startscrolldiagright(uint8_t start, uint8_t stop){
ssd1306_command(SSD1306_SET_VERTICAL_SCROLL_AREA);
ssd1306_command(0X00);
ssd1306_command(SSD1306_LCDHEIGHT);
ssd1306_command(SSD1306_VERTICAL_AND_RIGHT_HORIZONTAL_SCROLL);
ssd1306_command(0X00);
ssd1306_command(start);
ssd1306_command(0X00);
ssd1306_command(stop);
ssd1306_command(0X01);
ssd1306_command(SSD1306_ACTIVATE_SCROLL);
}
// startscrolldiagleft
// Activate a diagonal scroll for rows start through stop
// Hint, the display is 16 rows tall. To scroll the whole display, run:
// display.scrollright(0x00, 0x0F)
void Adafruit_SSD1306::startscrolldiagleft(uint8_t start, uint8_t stop){
ssd1306_command(SSD1306_SET_VERTICAL_SCROLL_AREA);
ssd1306_command(0X00);
ssd1306_command(SSD1306_LCDHEIGHT);
ssd1306_command(SSD1306_VERTICAL_AND_LEFT_HORIZONTAL_SCROLL);
ssd1306_command(0X00);
ssd1306_command(start);
ssd1306_command(0X00);
ssd1306_command(stop);
ssd1306_command(0X01);
ssd1306_command(SSD1306_ACTIVATE_SCROLL);
}
void Adafruit_SSD1306::stopscroll(void){
ssd1306_command(SSD1306_DEACTIVATE_SCROLL);
}
// Dim the display
// dim = true: display is dimmed
// dim = false: display is normal
void Adafruit_SSD1306::dim(bool dim) {
uint8_t contrast;
if (dim) {
contrast = 0; // Dimmed display
} else {
if (_vccstate == SSD1306_EXTERNALVCC) {
contrast = 0x9F;
} else {
contrast = 0xCF;
}
}
// the range of contrast to too small to be really useful
// it is useful to dim the display
ssd1306_command(SSD1306_SETCONTRAST);
ssd1306_command(contrast);
}
void Adafruit_SSD1306::ssd1306_data(uint8_t c) {
if (sid != -1)
{
// SPI
digitalWrite(cs, HIGH);
digitalWrite(dc, HIGH);
digitalWrite(cs, LOW);
fastSPIwrite(c);
digitalWrite(cs, HIGH);
}
else
{
// I2C
uint8_t control = 0x40; // Co = 0, D/C = 1
Wire.beginTransmission(_i2caddr);
Wire.write(control);
Wire.write(c);
Wire.endTransmission();
}
}
void Adafruit_SSD1306::display(void) {
ssd1306_command(SSD1306_COLUMNADDR);
ssd1306_command(0); // Column start address (0 = reset)
ssd1306_command(127); // Column end address (127 = reset)
ssd1306_command(SSD1306_PAGEADDR);
ssd1306_command(0); // Page start address (0 = reset)
ssd1306_command((SSD1306_LCDHEIGHT == 64) ? 7 : 3); // Page end address
if (sid != -1)
{
// SPI
digitalWrite(cs, HIGH);
digitalWrite(dc, HIGH);
digitalWrite(cs, LOW);
delayMicroseconds(1); // May not be necessary - needs testing
for (uint16_t i=0; i<(SSD1306_LCDWIDTH*SSD1306_LCDHEIGHT/8); i++) {
fastSPIwrite(buffer[i]);
//ssd1306_data(buffer[i]);
}
delayMicroseconds(1); // May not be necessary - needs testing
digitalWrite(cs, HIGH);
}
else
{
// I2C
for (uint16_t i=0; i<(SSD1306_LCDWIDTH*SSD1306_LCDHEIGHT/8); i++) {
// send a bunch of data in one xmission
Wire.beginTransmission(_i2caddr);
Wire.write(0x40);
for (uint8_t x=0; x<16; x++) {
Wire.write(buffer[i]);
i++;
}
i--;
Wire.endTransmission();
}
}
}
// clear everything
void Adafruit_SSD1306::clearDisplay(void) {
memset(buffer, 0, (SSD1306_LCDWIDTH*SSD1306_LCDHEIGHT/8));
}
inline void Adafruit_SSD1306::fastSPIwrite(uint8_t d) {
if(hwSPI) {
(void)SPI.transfer(d);
} else {
shiftOut(sid, sclk, MSBFIRST, d); // SSD1306 specs show MSB out first
}
}
void Adafruit_SSD1306::drawFastHLine(int16_t x, int16_t y, int16_t w, uint16_t color) {
boolean bSwap = false;
switch(rotation) {
case 0:
// 0 degree rotation, do nothing
break;
case 1:
// 90 degree rotation, swap x & y for rotation, then invert x
bSwap = true;
swap(x, y);
x = WIDTH - x - 1;
break;
case 2:
// 180 degree rotation, invert x and y - then shift y around for height.
x = WIDTH - x - 1;
y = HEIGHT - y - 1;
x -= (w-1);
break;
case 3:
// 270 degree rotation, swap x & y for rotation, then invert y and adjust y for w (not to become h)
bSwap = true;
swap(x, y);
y = HEIGHT - y - 1;
y -= (w-1);
break;
}
if(bSwap) {
drawFastVLineInternal(x, y, w, color);
} else {
drawFastHLineInternal(x, y, w, color);
}
}
void Adafruit_SSD1306::drawFastHLineInternal(int16_t x, int16_t y, int16_t w, uint16_t color) {
// Do bounds/limit checks
if(y < 0 || y >= HEIGHT) { return; }
// make sure we don't try to draw below 0
if(x < 0) {
w += x;
x = 0;
}
// make sure we don't go off the edge of the display
if( (x + w) > WIDTH) {
w = (HEIGHT- x);
}
// if our width is now negative, punt
if(w <= 0) { return; }
// set up the pointer for movement through the buffer
register uint8_t *pBuf = buffer;
// adjust the buffer pointer for the current row
pBuf += ((y/8) * SSD1306_LCDWIDTH);
// and offset x columns in
pBuf += x;
register uint8_t mask = 1 << (y&7);
if(color == WHITE) {
while(w--) { *pBuf++ |= mask; }
} else {
mask = ~mask;
while(w--) { *pBuf++ &= mask; }
}
}
void Adafruit_SSD1306::drawFastVLine(int16_t x, int16_t y, int16_t h, uint16_t color) {
bool bSwap = false;
switch(rotation) {
case 0:
break;
case 1:
// 90 degree rotation, swap x & y for rotation, then invert x and adjust x for h (now to become w)
bSwap = true;
swap(x, y);
x = WIDTH - x - 1;
x -= (h-1);
break;
case 2:
// 180 degree rotation, invert x and y - then shift y around for height.
x = WIDTH - x - 1;
y = HEIGHT - y - 1;
y -= (h-1);
break;
case 3:
// 270 degree rotation, swap x & y for rotation, then invert y
bSwap = true;
swap(x, y);
y = HEIGHT - y - 1;
break;
}
if(bSwap) {
drawFastHLineInternal(x, y, h, color);
} else {
drawFastVLineInternal(x, y, h, color);
}
}
void Adafruit_SSD1306::drawFastVLineInternal(int16_t x, int16_t __y, int16_t __h, uint16_t color) {
// do nothing if we're off the left or right side of the screen
if(x < 0 || x >= WIDTH) { return; }
// make sure we don't try to draw below 0
if(__y < 0) {
// __y is negative, this will subtract enough from __h to account for __y being 0
__h += __y;
__y = 0;
}
// make sure we don't go past the height of the display
if( (__y + __h) > HEIGHT) {
__h = (HEIGHT - __y);
}
// if our height is now negative, punt
if(__h <= 0) {
return;
}
// this display doesn't need ints for coordinates, use local byte registers for faster juggling
register uint8_t y = __y;
register uint8_t h = __h;
// set up the pointer for fast movement through the buffer
register uint8_t *pBuf = buffer;
// adjust the buffer pointer for the current row
pBuf += ((y/8) * SSD1306_LCDWIDTH);
// and offset x columns in
pBuf += x;
// do the first partial byte, if necessary - this requires some masking
register uint8_t mod = (y&7);
if(mod) {
// mask off the high n bits we want to set
mod = 8-mod;
// note - lookup table results in a nearly 10% performance improvement in fill* functions
// register uint8_t mask = ~(0xFF >> (mod));
static uint8_t premask[8] = {0x00, 0x80, 0xC0, 0xE0, 0xF0, 0xF8, 0xFC, 0xFE };
register uint8_t mask = premask[mod];
// adjust the mask if we're not going to reach the end of this byte
if( h < mod) {
mask &= (0XFF >> (mod-h));
}
if(color == WHITE) {
*pBuf |= mask;
} else {
*pBuf &= ~mask;
}
// fast exit if we're done here!
if(h<mod) { return; }
h -= mod;
pBuf += SSD1306_LCDWIDTH;
}
// write solid bytes while we can - effectively doing 8 rows at a time
if(h >= 8) {
// store a local value to work with
register uint8_t val = (color == WHITE) ? 255 : 0;
do {
// write our value in
*pBuf = val;
// adjust the buffer forward 8 rows worth of data
pBuf += SSD1306_LCDWIDTH;
// adjust h & y (there's got to be a faster way for me to do this, but this should still help a fair bit for now)
h -= 8;
} while(h >= 8);
}
// now do the final partial byte, if necessary
if(h) {
mod = h & 7;
// this time we want to mask the low bits of the byte, vs the high bits we did above
// register uint8_t mask = (1 << mod) - 1;
// note - lookup table results in a nearly 10% performance improvement in fill* functions
static uint8_t postmask[8] = {0x00, 0x01, 0x03, 0x07, 0x0F, 0x1F, 0x3F, 0x7F };
register uint8_t mask = postmask[mod];
if(color == WHITE) {
*pBuf |= mask;
} else {
*pBuf &= ~mask;
}
}
}
#ifndef _ADAFRUIT_GFX_H
#define _ADAFRUIT_GFX_H
#include "application.h"
#define swap(a, b) { int16_t t = a; a = b; b = t; }
class Adafruit_GFX : public Print {
public:
Adafruit_GFX(int16_t w, int16_t h); // Constructor
// This MUST be defined by the subclass:
virtual void drawPixel(int16_t x, int16_t y, uint16_t color) = 0;
// These MAY be overridden by the subclass to provide device-specific
// optimized code. Otherwise 'generic' versions are used.
virtual void
drawLine(int16_t x0, int16_t y0, int16_t x1, int16_t y1, uint16_t color),
drawFastVLine(int16_t x, int16_t y, int16_t h, uint16_t color),
drawFastHLine(int16_t x, int16_t y, int16_t w, uint16_t color),
drawRect(int16_t x, int16_t y, int16_t w, int16_t h, uint16_t color),
fillRect(int16_t x, int16_t y, int16_t w, int16_t h, uint16_t color),
fillScreen(uint16_t color),
invertDisplay(boolean i);
// These exist only with Adafruit_GFX (no subclass overrides)
void
drawCircle(int16_t x0, int16_t y0, int16_t r, uint16_t color),
drawCircleHelper(int16_t x0, int16_t y0, int16_t r, uint8_t cornername,
uint16_t color),
fillCircle(int16_t x0, int16_t y0, int16_t r, uint16_t color),
fillCircleHelper(int16_t x0, int16_t y0, int16_t r, uint8_t cornername,
int16_t delta, uint16_t color),
drawTriangle(int16_t x0, int16_t y0, int16_t x1, int16_t y1,
int16_t x2, int16_t y2, uint16_t color),
fillTriangle(int16_t x0, int16_t y0, int16_t x1, int16_t y1,
int16_t x2, int16_t y2, uint16_t color),
drawRoundRect(int16_t x0, int16_t y0, int16_t w, int16_t h,
int16_t radius, uint16_t color),
fillRoundRect(int16_t x0, int16_t y0, int16_t w, int16_t h,
int16_t radius, uint16_t color),
drawBitmap(int16_t x, int16_t y, const uint8_t *bitmap,
int16_t w, int16_t h, uint16_t color),
drawChar(int16_t x, int16_t y, unsigned char c, uint16_t color,
uint16_t bg, uint8_t size),
setCursor(int16_t x, int16_t y),
setTextColor(uint16_t c),
setTextColor(uint16_t c, uint16_t bg),
setTextSize(uint8_t s),
setTextWrap(boolean w),
setRotation(uint8_t r);
virtual size_t write(uint8_t);
int16_t
height(void),
width(void);
uint8_t getRotation(void);
protected:
const int16_t
WIDTH, HEIGHT; // This is the 'raw' display w/h - never changes
int16_t
_width, _height, // Display w/h as modified by current rotation
cursor_x, cursor_y;
uint16_t
textcolor, textbgcolor;
uint8_t
textsize,
rotation;
boolean
wrap; // If set, 'wrap' text at right edge of display
};
#endif // _ADAFRUIT_GFX_H
/*
This is the core graphics library for all our displays, providing a common
set of graphics primitives (points, lines, circles, etc.). It needs to be
paired with a hardware-specific library for each display device we carry
(to handle the lower-level functions).
Adafruit invests time and resources providing this open source code, please
support Adafruit & open-source hardware by purchasing products from Adafruit!
Copyright (c) 2013 Adafruit Industries. All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
- Redistributions of source code must retain the above copyright notice,
this list of conditions and the following disclaimer.
- Redistributions in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the documentation
and/or other materials provided with the distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
*/
#include "Adafruit_GFX.h"
#define pgm_read_byte(addr) (*(const unsigned char *)(addr))
static const unsigned char font[] = {
0x00, 0x00, 0x00, 0x00, 0x00,
0x3E, 0x5B, 0x4F, 0x5B, 0x3E,
0x3E, 0x6B, 0x4F, 0x6B, 0x3E,
0x1C, 0x3E, 0x7C, 0x3E, 0x1C,
0x18, 0x3C, 0x7E, 0x3C, 0x18,
0x1C, 0x57, 0x7D, 0x57, 0x1C,
0x1C, 0x5E, 0x7F, 0x5E, 0x1C,
0x00, 0x18, 0x3C, 0x18, 0x00,
0xFF, 0xE7, 0xC3, 0xE7, 0xFF,
0x00, 0x18, 0x24, 0x18, 0x00,
0xFF, 0xE7, 0xDB, 0xE7, 0xFF,
0x30, 0x48, 0x3A, 0x06, 0x0E,
0x26, 0x29, 0x79, 0x29, 0x26,
0x40, 0x7F, 0x05, 0x05, 0x07,
0x40, 0x7F, 0x05, 0x25, 0x3F,
0x5A, 0x3C, 0xE7, 0x3C, 0x5A,
0x7F, 0x3E, 0x1C, 0x1C, 0x08,
0x08, 0x1C, 0x1C, 0x3E, 0x7F,
0x14, 0x22, 0x7F, 0x22, 0x14,
0x5F, 0x5F, 0x00, 0x5F, 0x5F,
0x06, 0x09, 0x7F, 0x01, 0x7F,
0x00, 0x66, 0x89, 0x95, 0x6A,
0x60, 0x60, 0x60, 0x60, 0x60,
0x94, 0xA2, 0xFF, 0xA2, 0x94,
0x08, 0x04, 0x7E, 0x04, 0x08,
0x10, 0x20, 0x7E, 0x20, 0x10,
0x08, 0x08, 0x2A, 0x1C, 0x08,
0x08, 0x1C, 0x2A, 0x08, 0x08,
0x1E, 0x10, 0x10, 0x10, 0x10,
0x0C, 0x1E, 0x0C, 0x1E, 0x0C,
0x30, 0x38, 0x3E, 0x38, 0x30,
0x06, 0x0E, 0x3E, 0x0E, 0x06,
0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x5F, 0x00, 0x00,
0x00, 0x07, 0x00, 0x07, 0x00,
0x14, 0x7F, 0x14, 0x7F, 0x14,
0x24, 0x2A, 0x7F, 0x2A, 0x12,
0x23, 0x13, 0x08, 0x64, 0x62,
0x36, 0x49, 0x56, 0x20, 0x50,
0x00, 0x08, 0x07, 0x03, 0x00,
0x00, 0x1C, 0x22, 0x41, 0x00,
0x00, 0x41, 0x22, 0x1C, 0x00,
0x2A, 0x1C, 0x7F, 0x1C, 0x2A,
0x08, 0x08, 0x3E, 0x08, 0x08,
0x00, 0x80, 0x70, 0x30, 0x00,
0x08, 0x08, 0x08, 0x08, 0x08,
0x00, 0x00, 0x60, 0x60, 0x00,
0x20, 0x10, 0x08, 0x04, 0x02,
0x3E, 0x51, 0x49, 0x45, 0x3E,
0x00, 0x42, 0x7F, 0x40, 0x00,
0x72, 0x49, 0x49, 0x49, 0x46,
0x21, 0x41, 0x49, 0x4D, 0x33,
0x18, 0x14, 0x12, 0x7F, 0x10,
0x27, 0x45, 0x45, 0x45, 0x39,
0x3C, 0x4A, 0x49, 0x49, 0x31,
0x41, 0x21, 0x11, 0x09, 0x07,
0x36, 0x49, 0x49, 0x49, 0x36,
0x46, 0x49, 0x49, 0x29, 0x1E,
0x00, 0x00, 0x14, 0x00, 0x00,
0x00, 0x40, 0x34, 0x00, 0x00,
0x00, 0x08, 0x14, 0x22, 0x41,
0x14, 0x14, 0x14, 0x14, 0x14,
0x00, 0x41, 0x22, 0x14, 0x08,
0x02, 0x01, 0x59, 0x09, 0x06,
0x3E, 0x41, 0x5D, 0x59, 0x4E,
0x7C, 0x12, 0x11, 0x12, 0x7C,
0x7F, 0x49, 0x49, 0x49, 0x36,
0x3E, 0x41, 0x41, 0x41, 0x22,
0x7F, 0x41, 0x41, 0x41, 0x3E,
0x7F, 0x49, 0x49, 0x49, 0x41,
0x7F, 0x09, 0x09, 0x09, 0x01,
0x3E, 0x41, 0x41, 0x51, 0x73,
0x7F, 0x08, 0x08, 0x08, 0x7F,
0x00, 0x41, 0x7F, 0x41, 0x00,
0x20, 0x40, 0x41, 0x3F, 0x01,
0x7F, 0x08, 0x14, 0x22, 0x41,
0x7F, 0x40, 0x40, 0x40, 0x40,
0x7F, 0x02, 0x1C, 0x02, 0x7F,
0x7F, 0x04, 0x08, 0x10, 0x7F,
0x3E, 0x41, 0x41, 0x41, 0x3E,
0x7F, 0x09, 0x09, 0x09, 0x06,
0x3E, 0x41, 0x51, 0x21, 0x5E,
0x7F, 0x09, 0x19, 0x29, 0x46,
0x26, 0x49, 0x49, 0x49, 0x32,
0x03, 0x01, 0x7F, 0x01, 0x03,
0x3F, 0x40, 0x40, 0x40, 0x3F,
0x1F, 0x20, 0x40, 0x20, 0x1F,
0x3F, 0x40, 0x38, 0x40, 0x3F,
0x63, 0x14, 0x08, 0x14, 0x63,
0x03, 0x04, 0x78, 0x04, 0x03,
0x61, 0x59, 0x49, 0x4D, 0x43,
0x00, 0x7F, 0x41, 0x41, 0x41,
0x02, 0x04, 0x08, 0x10, 0x20,
0x00, 0x41, 0x41, 0x41, 0x7F,
0x04, 0x02, 0x01, 0x02, 0x04,
0x40, 0x40, 0x40, 0x40, 0x40,
0x00, 0x03, 0x07, 0x08, 0x00,
0x20, 0x54, 0x54, 0x78, 0x40,
0x7F, 0x28, 0x44, 0x44, 0x38,
0x38, 0x44, 0x44, 0x44, 0x28,
0x38, 0x44, 0x44, 0x28, 0x7F,
0x38, 0x54, 0x54, 0x54, 0x18,
0x00, 0x08, 0x7E, 0x09, 0x02,
0x18, 0xA4, 0xA4, 0x9C, 0x78,
0x7F, 0x08, 0x04, 0x04, 0x78,
0x00, 0x44, 0x7D, 0x40, 0x00,
0x20, 0x40, 0x40, 0x3D, 0x00,
0x7F, 0x10, 0x28, 0x44, 0x00,
0x00, 0x41, 0x7F, 0x40, 0x00,
0x7C, 0x04, 0x78, 0x04, 0x78,
0x7C, 0x08, 0x04, 0x04, 0x78,
0x38, 0x44, 0x44, 0x44, 0x38,
0xFC, 0x18, 0x24, 0x24, 0x18,
0x18, 0x24, 0x24, 0x18, 0xFC,
0x7C, 0x08, 0x04, 0x04, 0x08,
0x48, 0x54, 0x54, 0x54, 0x24,
0x04, 0x04, 0x3F, 0x44, 0x24,
0x3C, 0x40, 0x40, 0x20, 0x7C,
0x1C, 0x20, 0x40, 0x20, 0x1C,
0x3C, 0x40, 0x30, 0x40, 0x3C,
0x44, 0x28, 0x10, 0x28, 0x44,
0x4C, 0x90, 0x90, 0x90, 0x7C,
0x44, 0x64, 0x54, 0x4C, 0x44,
0x00, 0x08, 0x36, 0x41, 0x00,
0x00, 0x00, 0x77, 0x00, 0x00,
0x00, 0x41, 0x36, 0x08, 0x00,
0x02, 0x01, 0x02, 0x04, 0x02,
0x3C, 0x26, 0x23, 0x26, 0x3C,
0x1E, 0xA1, 0xA1, 0x61, 0x12,
0x3A, 0x40, 0x40, 0x20, 0x7A,
0x38, 0x54, 0x54, 0x55, 0x59,
0x21, 0x55, 0x55, 0x79, 0x41,
0x21, 0x54, 0x54, 0x78, 0x41,
0x21, 0x55, 0x54, 0x78, 0x40,
0x20, 0x54, 0x55, 0x79, 0x40,
0x0C, 0x1E, 0x52, 0x72, 0x12,
0x39, 0x55, 0x55, 0x55, 0x59,
0x39, 0x54, 0x54, 0x54, 0x59,
0x39, 0x55, 0x54, 0x54, 0x58,
0x00, 0x00, 0x45, 0x7C, 0x41,
0x00, 0x02, 0x45, 0x7D, 0x42,
0x00, 0x01, 0x45, 0x7C, 0x40,
0xF0, 0x29, 0x24, 0x29, 0xF0,
0xF0, 0x28, 0x25, 0x28, 0xF0,
0x7C, 0x54, 0x55, 0x45, 0x00,
0x20, 0x54, 0x54, 0x7C, 0x54,
0x7C, 0x0A, 0x09, 0x7F, 0x49,
0x32, 0x49, 0x49, 0x49, 0x32,
0x32, 0x48, 0x48, 0x48, 0x32,
0x32, 0x4A, 0x48, 0x48, 0x30,
0x3A, 0x41, 0x41, 0x21, 0x7A,
0x3A, 0x42, 0x40, 0x20, 0x78,
0x00, 0x9D, 0xA0, 0xA0, 0x7D,
0x39, 0x44, 0x44, 0x44, 0x39,
0x3D, 0x40, 0x40, 0x40, 0x3D,
0x3C, 0x24, 0xFF, 0x24, 0x24,
0x48, 0x7E, 0x49, 0x43, 0x66,
0x2B, 0x2F, 0xFC, 0x2F, 0x2B,
0xFF, 0x09, 0x29, 0xF6, 0x20,
0xC0, 0x88, 0x7E, 0x09, 0x03,
0x20, 0x54, 0x54, 0x79, 0x41,
0x00, 0x00, 0x44, 0x7D, 0x41,
0x30, 0x48, 0x48, 0x4A, 0x32,
0x38, 0x40, 0x40, 0x22, 0x7A,
0x00, 0x7A, 0x0A, 0x0A, 0x72,
0x7D, 0x0D, 0x19, 0x31, 0x7D,
0x26, 0x29, 0x29, 0x2F, 0x28,
0x26, 0x29, 0x29, 0x29, 0x26,
0x30, 0x48, 0x4D, 0x40, 0x20,
0x38, 0x08, 0x08, 0x08, 0x08,
0x08, 0x08, 0x08, 0x08, 0x38,
0x2F, 0x10, 0xC8, 0xAC, 0xBA,
0x2F, 0x10, 0x28, 0x34, 0xFA,
0x00, 0x00, 0x7B, 0x00, 0x00,
0x08, 0x14, 0x2A, 0x14, 0x22,
0x22, 0x14, 0x2A, 0x14, 0x08,
0xAA, 0x00, 0x55, 0x00, 0xAA,
0xAA, 0x55, 0xAA, 0x55, 0xAA,
0x00, 0x00, 0x00, 0xFF, 0x00,
0x10, 0x10, 0x10, 0xFF, 0x00,
0x14, 0x14, 0x14, 0xFF, 0x00,
0x10, 0x10, 0xFF, 0x00, 0xFF,
0x10, 0x10, 0xF0, 0x10, 0xF0,
0x14, 0x14, 0x14, 0xFC, 0x00,
0x14, 0x14, 0xF7, 0x00, 0xFF,
0x00, 0x00, 0xFF, 0x00, 0xFF,
0x14, 0x14, 0xF4, 0x04, 0xFC,
0x14, 0x14, 0x17, 0x10, 0x1F,
0x10, 0x10, 0x1F, 0x10, 0x1F,
0x14, 0x14, 0x14, 0x1F, 0x00,
0x10, 0x10, 0x10, 0xF0, 0x00,
0x00, 0x00, 0x00, 0x1F, 0x10,
0x10, 0x10, 0x10, 0x1F, 0x10,
0x10, 0x10, 0x10, 0xF0, 0x10,
0x00, 0x00, 0x00, 0xFF, 0x10,
0x10, 0x10, 0x10, 0x10, 0x10,
0x10, 0x10, 0x10, 0xFF, 0x10,
0x00, 0x00, 0x00, 0xFF, 0x14,
0x00, 0x00, 0xFF, 0x00, 0xFF,
0x00, 0x00, 0x1F, 0x10, 0x17,
0x00, 0x00, 0xFC, 0x04, 0xF4,
0x14, 0x14, 0x17, 0x10, 0x17,
0x14, 0x14, 0xF4, 0x04, 0xF4,
0x00, 0x00, 0xFF, 0x00, 0xF7,
0x14, 0x14, 0x14, 0x14, 0x14,
0x14, 0x14, 0xF7, 0x00, 0xF7,
0x14, 0x14, 0x14, 0x17, 0x14,
0x10, 0x10, 0x1F, 0x10, 0x1F,
0x14, 0x14, 0x14, 0xF4, 0x14,
0x10, 0x10, 0xF0, 0x10, 0xF0,
0x00, 0x00, 0x1F, 0x10, 0x1F,
0x00, 0x00, 0x00, 0x1F, 0x14,
0x00, 0x00, 0x00, 0xFC, 0x14,
0x00, 0x00, 0xF0, 0x10, 0xF0,
0x10, 0x10, 0xFF, 0x10, 0xFF,
0x14, 0x14, 0x14, 0xFF, 0x14,
0x10, 0x10, 0x10, 0x1F, 0x00,
0x00, 0x00, 0x00, 0xF0, 0x10,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xF0, 0xF0, 0xF0, 0xF0, 0xF0,
0xFF, 0xFF, 0xFF, 0x00, 0x00,
0x00, 0x00, 0x00, 0xFF, 0xFF,
0x0F, 0x0F, 0x0F, 0x0F, 0x0F,
0x38, 0x44, 0x44, 0x38, 0x44,
0x7C, 0x2A, 0x2A, 0x3E, 0x14,
0x7E, 0x02, 0x02, 0x06, 0x06,
0x02, 0x7E, 0x02, 0x7E, 0x02,
0x63, 0x55, 0x49, 0x41, 0x63,
0x38, 0x44, 0x44, 0x3C, 0x04,
0x40, 0x7E, 0x20, 0x1E, 0x20,
0x06, 0x02, 0x7E, 0x02, 0x02,
0x99, 0xA5, 0xE7, 0xA5, 0x99,
0x1C, 0x2A, 0x49, 0x2A, 0x1C,
0x4C, 0x72, 0x01, 0x72, 0x4C,
0x30, 0x4A, 0x4D, 0x4D, 0x30,
0x30, 0x48, 0x78, 0x48, 0x30,
0xBC, 0x62, 0x5A, 0x46, 0x3D,
0x3E, 0x49, 0x49, 0x49, 0x00,
0x7E, 0x01, 0x01, 0x01, 0x7E,
0x2A, 0x2A, 0x2A, 0x2A, 0x2A,
0x44, 0x44, 0x5F, 0x44, 0x44,
0x40, 0x51, 0x4A, 0x44, 0x40,
0x40, 0x44, 0x4A, 0x51, 0x40,
0x00, 0x00, 0xFF, 0x01, 0x03,
0xE0, 0x80, 0xFF, 0x00, 0x00,
0x08, 0x08, 0x6B, 0x6B, 0x08,
0x36, 0x12, 0x36, 0x24, 0x36,
0x06, 0x0F, 0x09, 0x0F, 0x06,
0x00, 0x00, 0x18, 0x18, 0x00,
0x00, 0x00, 0x10, 0x10, 0x00,
0x30, 0x40, 0xFF, 0x01, 0x01,
0x00, 0x1F, 0x01, 0x01, 0x1E,
0x00, 0x19, 0x1D, 0x17, 0x12,
0x00, 0x3C, 0x3C, 0x3C, 0x3C,
0x00, 0x00, 0x00, 0x00, 0x00
};
Adafruit_GFX::Adafruit_GFX(int16_t w, int16_t h):
WIDTH(w), HEIGHT(h)
{
_width = WIDTH;
_height = HEIGHT;
rotation = 0;
cursor_y = cursor_x = 0;
textsize = 1;
textcolor = textbgcolor = 0xFFFF;
wrap = true;
}
// Draw a circle outline
void Adafruit_GFX::drawCircle(int16_t x0, int16_t y0, int16_t r,
uint16_t color) {
int16_t f = 1 - r;
int16_t ddF_x = 1;
int16_t ddF_y = -2 * r;
int16_t x = 0;
int16_t y = r;
drawPixel(x0 , y0+r, color);
drawPixel(x0 , y0-r, color);
drawPixel(x0+r, y0 , color);
drawPixel(x0-r, y0 , color);
while (x<y) {
if (f >= 0) {
y--;
ddF_y += 2;
f += ddF_y;
}
x++;
ddF_x += 2;
f += ddF_x;
drawPixel(x0 + x, y0 + y, color);
drawPixel(x0 - x, y0 + y, color);
drawPixel(x0 + x, y0 - y, color);
drawPixel(x0 - x, y0 - y, color);
drawPixel(x0 + y, y0 + x, color);
drawPixel(x0 - y, y0 + x, color);
drawPixel(x0 + y, y0 - x, color);
drawPixel(x0 - y, y0 - x, color);
}
}
void Adafruit_GFX::drawCircleHelper( int16_t x0, int16_t y0,
int16_t r, uint8_t cornername, uint16_t color) {
int16_t f = 1 - r;
int16_t ddF_x = 1;
int16_t ddF_y = -2 * r;
int16_t x = 0;
int16_t y = r;
while (x<y) {
if (f >= 0) {
y--;
ddF_y += 2;
f += ddF_y;
}
x++;
ddF_x += 2;
f += ddF_x;
if (cornername & 0x4) {
drawPixel(x0 + x, y0 + y, color);
drawPixel(x0 + y, y0 + x, color);
}
if (cornername & 0x2) {
drawPixel(x0 + x, y0 - y, color);
drawPixel(x0 + y, y0 - x, color);
}
if (cornername & 0x8) {
drawPixel(x0 - y, y0 + x, color);
drawPixel(x0 - x, y0 + y, color);
}
if (cornername & 0x1) {
drawPixel(x0 - y, y0 - x, color);
drawPixel(x0 - x, y0 - y, color);
}
}
}
void Adafruit_GFX::fillCircle(int16_t x0, int16_t y0, int16_t r,
uint16_t color) {
drawFastVLine(x0, y0-r, 2*r+1, color);
fillCircleHelper(x0, y0, r, 3, 0, color);
}
// Used to do circles and roundrects
void Adafruit_GFX::fillCircleHelper(int16_t x0, int16_t y0, int16_t r,
uint8_t cornername, int16_t delta, uint16_t color) {
int16_t f = 1 - r;
int16_t ddF_x = 1;
int16_t ddF_y = -2 * r;
int16_t x = 0;
int16_t y = r;
while (x<y) {
if (f >= 0) {
y--;
ddF_y += 2;
f += ddF_y;
}
x++;
ddF_x += 2;
f += ddF_x;
if (cornername & 0x1) {
drawFastVLine(x0+x, y0-y, 2*y+1+delta, color);
drawFastVLine(x0+y, y0-x, 2*x+1+delta, color);
}
if (cornername & 0x2) {
drawFastVLine(x0-x, y0-y, 2*y+1+delta, color);
drawFastVLine(x0-y, y0-x, 2*x+1+delta, color);
}
}
}
// Bresenham's algorithm - thx wikpedia
void Adafruit_GFX::drawLine(int16_t x0, int16_t y0,
int16_t x1, int16_t y1,
uint16_t color) {
int16_t steep = abs(y1 - y0) > abs(x1 - x0);
if (steep) {
swap(x0, y0);
swap(x1, y1);
}
if (x0 > x1) {
swap(x0, x1);
swap(y0, y1);
}
int16_t dx, dy;
dx = x1 - x0;
dy = abs(y1 - y0);
int16_t err = dx / 2;
int16_t ystep;
if (y0 < y1) {
ystep = 1;
} else {
ystep = -1;
}
for (; x0<=x1; x0++) {
if (steep) {
drawPixel(y0, x0, color);
} else {
drawPixel(x0, y0, color);
}
err -= dy;
if (err < 0) {
y0 += ystep;
err += dx;
}
}
}
// Draw a rectangle
void Adafruit_GFX::drawRect(int16_t x, int16_t y,
int16_t w, int16_t h,
uint16_t color) {
drawFastHLine(x, y, w, color);
drawFastHLine(x, y+h-1, w, color);
drawFastVLine(x, y, h, color);
drawFastVLine(x+w-1, y, h, color);
}
void Adafruit_GFX::drawFastVLine(int16_t x, int16_t y,
int16_t h, uint16_t color) {
// Update in subclasses if desired!
drawLine(x, y, x, y+h-1, color);
}
void Adafruit_GFX::drawFastHLine(int16_t x, int16_t y,
int16_t w, uint16_t color) {
// Update in subclasses if desired!
drawLine(x, y, x+w-1, y, color);
}
void Adafruit_GFX::fillRect(int16_t x, int16_t y, int16_t w, int16_t h,
uint16_t color) {
// Update in subclasses if desired!
for (int16_t i=x; i<x+w; i++) {
drawFastVLine(i, y, h, color);
}
}
void Adafruit_GFX::fillScreen(uint16_t color) {
fillRect(0, 0, _width, _height, color);
}
// Draw a rounded rectangle
void Adafruit_GFX::drawRoundRect(int16_t x, int16_t y, int16_t w,
int16_t h, int16_t r, uint16_t color) {
// smarter version
drawFastHLine(x+r , y , w-2*r, color); // Top
drawFastHLine(x+r , y+h-1, w-2*r, color); // Bottom
drawFastVLine(x , y+r , h-2*r, color); // Left
drawFastVLine(x+w-1, y+r , h-2*r, color); // Right
// draw four corners
drawCircleHelper(x+r , y+r , r, 1, color);
drawCircleHelper(x+w-r-1, y+r , r, 2, color);
drawCircleHelper(x+w-r-1, y+h-r-1, r, 4, color);
drawCircleHelper(x+r , y+h-r-1, r, 8, color);
}
// Fill a rounded rectangle
void Adafruit_GFX::fillRoundRect(int16_t x, int16_t y, int16_t w,
int16_t h, int16_t r, uint16_t color) {
// smarter version
fillRect(x+r, y, w-2*r, h, color);
// draw four corners
fillCircleHelper(x+w-r-1, y+r, r, 1, h-2*r-1, color);
fillCircleHelper(x+r , y+r, r, 2, h-2*r-1, color);
}
// Draw a triangle
void Adafruit_GFX::drawTriangle(int16_t x0, int16_t y0,
int16_t x1, int16_t y1,
int16_t x2, int16_t y2, uint16_t color) {
drawLine(x0, y0, x1, y1, color);
drawLine(x1, y1, x2, y2, color);
drawLine(x2, y2, x0, y0, color);
}
// Fill a triangle
void Adafruit_GFX::fillTriangle ( int16_t x0, int16_t y0,
int16_t x1, int16_t y1,
int16_t x2, int16_t y2, uint16_t color) {
int16_t a, b, y, last;
// Sort coordinates by Y order (y2 >= y1 >= y0)
if (y0 > y1) {
swap(y0, y1); swap(x0, x1);
}
if (y1 > y2) {
swap(y2, y1); swap(x2, x1);
}
if (y0 > y1) {
swap(y0, y1); swap(x0, x1);
}
if(y0 == y2) { // Handle awkward all-on-same-line case as its own thing
a = b = x0;
if(x1 < a) a = x1;
else if(x1 > b) b = x1;
if(x2 < a) a = x2;
else if(x2 > b) b = x2;
drawFastHLine(a, y0, b-a+1, color);
return;
}
int16_t
dx01 = x1 - x0,
dy01 = y1 - y0,
dx02 = x2 - x0,
dy02 = y2 - y0,
dx12 = x2 - x1,
dy12 = y2 - y1,
sa = 0,
sb = 0;
// For upper part of triangle, find scanline crossings for segments
// 0-1 and 0-2. If y1=y2 (flat-bottomed triangle), the scanline y1
// is included here (and second loop will be skipped, avoiding a /0
// error there), otherwise scanline y1 is skipped here and handled
// in the second loop...which also avoids a /0 error here if y0=y1
// (flat-topped triangle).
if(y1 == y2) last = y1; // Include y1 scanline
else last = y1-1; // Skip it
for(y=y0; y<=last; y++) {
a = x0 + sa / dy01;
b = x0 + sb / dy02;
sa += dx01;
sb += dx02;
/* longhand:
a = x0 + (x1 - x0) * (y - y0) / (y1 - y0);
b = x0 + (x2 - x0) * (y - y0) / (y2 - y0);
*/
if(a > b) swap(a,b);
drawFastHLine(a, y, b-a+1, color);
}
// For lower part of triangle, find scanline crossings for segments
// 0-2 and 1-2. This loop is skipped if y1=y2.
sa = dx12 * (y - y1);
sb = dx02 * (y - y0);
for(; y<=y2; y++) {
a = x1 + sa / dy12;
b = x0 + sb / dy02;
sa += dx12;
sb += dx02;
/* longhand:
a = x1 + (x2 - x1) * (y - y1) / (y2 - y1);
b = x0 + (x2 - x0) * (y - y0) / (y2 - y0);
*/
if(a > b) swap(a,b);
drawFastHLine(a, y, b-a+1, color);
}
}
void Adafruit_GFX::drawBitmap(int16_t x, int16_t y,
const uint8_t *bitmap, int16_t w, int16_t h,
uint16_t color) {
int16_t i, j, byteWidth = (w + 7) / 8;
for(j=0; j<h; j++) {
for(i=0; i<w; i++ ) {
if(pgm_read_byte(bitmap + j * byteWidth + i / 8) & (128 >> (i & 7))) {
drawPixel(x+i, y+j, color);
}
}
}
}
size_t Adafruit_GFX::write(uint8_t c) {
if (c == '\n') {
cursor_y += textsize*8;
cursor_x = 0;
} else if (c == '\r') {
// skip em
} else {
drawChar(cursor_x, cursor_y, c, textcolor, textbgcolor, textsize);
cursor_x += textsize*6;
if (wrap && (cursor_x > (_width - textsize*6))) {
cursor_y += textsize*8;
cursor_x = 0;
}
}
return 1;
}
// Draw a character
void Adafruit_GFX::drawChar(int16_t x, int16_t y, unsigned char c,
uint16_t color, uint16_t bg, uint8_t size) {
if((x >= _width) || // Clip right
(y >= _height) || // Clip bottom
((x + 6 * size - 1) < 0) || // Clip left
((y + 8 * size - 1) < 0)) // Clip top
return;
for (int8_t i=0; i<6; i++ ) {
uint8_t line;
if (i == 5)
line = 0x0;
else
line = pgm_read_byte(font+(c*5)+i);
for (int8_t j = 0; j<8; j++) {
if (line & 0x1) {
if (size == 1) // default size
drawPixel(x+i, y+j, color);
else { // big size
fillRect(x+(i*size), y+(j*size), size, size, color);
}
} else if (bg != color) {
if (size == 1) // default size
drawPixel(x+i, y+j, bg);
else { // big size
fillRect(x+i*size, y+j*size, size, size, bg);
}
}
line >>= 1;
}
}
}
void Adafruit_GFX::setCursor(int16_t x, int16_t y) {
cursor_x = x;
cursor_y = y;
}
void Adafruit_GFX::setTextSize(uint8_t s) {
textsize = (s > 0) ? s : 1;
}
void Adafruit_GFX::setTextColor(uint16_t c) {
// For 'transparent' background, we'll set the bg
// to the same as fg instead of using a flag
textcolor = textbgcolor = c;
}
void Adafruit_GFX::setTextColor(uint16_t c, uint16_t b) {
textcolor = c;
textbgcolor = b;
}
void Adafruit_GFX::setTextWrap(boolean w) {
wrap = w;
}
uint8_t Adafruit_GFX::getRotation(void) {
return rotation;
}
void Adafruit_GFX::setRotation(uint8_t x) {
rotation = (x & 3);
switch(rotation) {
case 0:
case 2:
_width = WIDTH;
_height = HEIGHT;
break;
case 1:
case 3:
_width = HEIGHT;
_height = WIDTH;
break;
}
}
// Return the size of the display (per current rotation)
int16_t Adafruit_GFX::width(void) {
return _width;
}
int16_t Adafruit_GFX::height(void) {
return _height;
}
void Adafruit_GFX::invertDisplay(boolean i) {
// Do nothing, must be subclassed if supported
}
#pragma once
#if defined(PARTICLE)
# include <Particle.h>
#else
# if ARDUINO >= 100
# include "Arduino.h"
# else
# include "WProgram.h"
# endif
#endif
#include <math.h>
class HX711ADC
{
private:
byte PD_SCK; // Power Down and Serial Clock Input Pin
byte DOUT; // Serial Data Output Pin
byte GAIN; // amplification factor
long OFFSET = 0; // used for tare weight
float SCALE = 1; // used to return weight in grams, kg, ounces, whatever
public:
// define clock and data pin, channel, and gain factor
// channel selection is made by passing the appropriate gain: 128 or 64 for channel A, 32 for channel B
// gain: 128 or 64 for channel A; channel B works with 32 gain factor only
HX711ADC(byte dout, byte pd_sck, byte gain = 128);
HX711ADC();
virtual ~HX711ADC();
// Allows to set the pins and gain later than in the constructor
void begin(byte dout, byte pd_sck, byte gain = 128);
// check if HX711 is ready
// from the datasheet: When output data is not ready for retrieval, digital output pin DOUT is high. Serial clock
// input PD_SCK should be low. When DOUT goes to low, it indicates data is ready for retrieval.
inline bool is_ready() { return !digitalRead(DOUT); };
// set the gain factor; takes effect only after a call to read()
// channel A can be set for a 128 or 64 gain; channel B has a fixed 32 gain
// depending on the parameter, the channel is also set to either A or B
void set_gain(byte gain = 128);
// waits for the chip to be ready and returns a reading (1sec default timeout)
long read(time_t timeout = 1000);
// returns an average reading; times = how many times to read
long read_average(byte times = 1);
// returns (read_average() - OFFSET), that is the current value without the tare weight; times = how many readings to do
double get_value(byte times = 1);
// returns get_value() divided by SCALE, that is the raw value divided by a value obtained via calibration
// times = how many readings to do
float get_units(byte times = 1);
// set the OFFSET value for tare weight; times = how many times to read the tare value
void tare(byte times = 10);
// set the SCALE value; this value is used to convert the raw data to "human readable" data (measure units)
void set_scale(float scale = 1.f);
// get the current SCALE
float get_scale();
// set OFFSET, the value that's subtracted from the actual reading (tare weight)
void set_offset(long offset = 0);
// get the current OFFSET
long get_offset();
// puts the chip into power down mode
void power_down();
// wakes up the chip after power down mode
void power_up();
#if defined(PARTICLE)
// to keep the Particle cloud happy when the library blocks
inline void yield() { Particle.process(); };
#endif
};
#include "HX711ADC.h"
HX711ADC::HX711ADC(byte dout, byte pd_sck, byte gain) {
begin(dout, pd_sck, gain);
}
HX711ADC::HX711ADC() {
}
HX711ADC::~HX711ADC() {
}
void HX711ADC::begin(byte dout, byte pd_sck, byte gain) {
PD_SCK = pd_sck;
DOUT = dout;
pinMode(PD_SCK, OUTPUT);
pinMode(DOUT, INPUT);
set_gain(gain);
}
void HX711ADC::set_gain(byte gain) {
switch (gain) {
case 128: // channel A, gain factor 128
GAIN = 1;
break;
case 64: // channel A, gain factor 64
GAIN = 3;
break;
case 32: // channel B, gain factor 32
GAIN = 2;
break;
}
digitalWrite(PD_SCK, LOW);
//read();
}
long HX711ADC::read(time_t timeout) {
// wait for the chip to become ready
for (time_t ms=millis(); !is_ready() && (millis() - ms < timeout);) {
// Will do nothing on Arduino but
// prevent resets of ESP8266 (Watchdog Issue)
// or keeps cloud housekeeping running on Particle devices
yield();
}
// still not ready after timeout periode, report error Not-A-Number
if (!is_ready()) return NAN;
unsigned long value = 0;
uint8_t data[3] = { 0 };
uint8_t filler = 0x00;
// pulse the clock pin 24 times to read the data
data[2] = shiftIn(DOUT, PD_SCK, MSBFIRST);
data[1] = shiftIn(DOUT, PD_SCK, MSBFIRST);
data[0] = shiftIn(DOUT, PD_SCK, MSBFIRST);
// set the channel and the gain factor for the next reading using the clock pin
for (unsigned int i = 0; i < GAIN; i++) {
digitalWrite(PD_SCK, HIGH);
digitalWrite(PD_SCK, LOW);
}
// Replicate the most significant bit to pad out a 32-bit signed integer
if (data[2] & 0x80) {
filler = 0xFF;
} else {
filler = 0x00;
}
// Construct a 32-bit signed integer
value = static_cast<unsigned long>(filler) << 24
| static_cast<unsigned long>(data[2]) << 16
| static_cast<unsigned long>(data[1]) << 8
| static_cast<unsigned long>(data[0]) ;
return static_cast<long>(value);
}
long HX711ADC::read_average(byte times) {
if (times <= 0) return NAN;
long sum = 0;
for (byte i = 0; i < times; i++) {
sum += read();
yield();
}
return sum / times;
}
double HX711ADC::get_value(byte times) {
return read_average(times) - OFFSET;
}
float HX711ADC::get_units(byte times) {
return get_value(times) / SCALE;
}
void HX711ADC::tare(byte times) {
double sum = read_average(times);
set_offset(sum);
}
void HX711ADC::set_scale(float scale) {
if (scale) {
SCALE = scale;
}
else {
SCALE = 1;
}
}
float HX711ADC::get_scale() {
return SCALE;
}
void HX711ADC::set_offset(long offset) {
OFFSET = offset;
}
long HX711ADC::get_offset() {
return OFFSET;
}
void HX711ADC::power_down() {
digitalWrite(PD_SCK, LOW);
digitalWrite(PD_SCK, HIGH);
}
void HX711ADC::power_up() {
digitalWrite(PD_SCK, LOW);
}
/*********************************************************************
This is a library for our Monochrome OLEDs based on SSD1306 drivers
Pick one up today in the adafruit shop!
------> http://www.adafruit.com/category/63_98
These displays use SPI to communicate, 4 or 5 pins are required to
interface
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, check license.txt for more information
All text above, and the splash screen must be included in any redistribution
*********************************************************************/
#include "application.h"
#include "Adafruit_GFX.h"
#define BLACK 0
#define WHITE 1
#define SSD1306_I2C_ADDRESS 0x3C // 011110+SA0+RW - 0x3C or 0x3D
// Address for 128x32 is 0x3C
// Address for 128x64 is 0x3D (default) or 0x3C (if SA0 is grounded)
/*=========================================================================
SSD1306 Displays
-----------------------------------------------------------------------
The driver is used in multiple displays (128x64, 128x32, etc.).
Select the appropriate display below to create an appropriately
sized framebuffer, etc.
SSD1306_128_64 128x64 pixel display
SSD1306_128_32 128x32 pixel display
-----------------------------------------------------------------------*/
#define SSD1306_128_64
//#define SSD1306_128_32
/*=========================================================================*/
#if defined SSD1306_128_64 && defined SSD1306_128_32
#error "Only one SSD1306 display can be specified at once in SSD1306.h"
#endif
#if !defined SSD1306_128_64 && !defined SSD1306_128_32
#error "At least one SSD1306 display must be specified in SSD1306.h"
#endif
#if defined SSD1306_128_64
#define SSD1306_LCDWIDTH 128
#define SSD1306_LCDHEIGHT 64
#endif
#if defined SSD1306_128_32
#define SSD1306_LCDWIDTH 128
#define SSD1306_LCDHEIGHT 32
#endif
#define SSD1306_SETCONTRAST 0x81
#define SSD1306_DISPLAYALLON_RESUME 0xA4
#define SSD1306_DISPLAYALLON 0xA5
#define SSD1306_NORMALDISPLAY 0xA6
#define SSD1306_INVERTDISPLAY 0xA7
#define SSD1306_DISPLAYOFF 0xAE
#define SSD1306_DISPLAYON 0xAF
#define SSD1306_SETDISPLAYOFFSET 0xD3
#define SSD1306_SETCOMPINS 0xDA
#define SSD1306_SETVCOMDETECT 0xDB
#define SSD1306_SETDISPLAYCLOCKDIV 0xD5
#define SSD1306_SETPRECHARGE 0xD9
#define SSD1306_SETMULTIPLEX 0xA8
#define SSD1306_SETLOWCOLUMN 0x00
#define SSD1306_SETHIGHCOLUMN 0x10
#define SSD1306_SETSTARTLINE 0x40
#define SSD1306_MEMORYMODE 0x20
#define SSD1306_COLUMNADDR 0x21
#define SSD1306_PAGEADDR 0x22
#define SSD1306_COMSCANINC 0xC0
#define SSD1306_COMSCANDEC 0xC8
#define SSD1306_SEGREMAP 0xA0
#define SSD1306_CHARGEPUMP 0x8D
#define SSD1306_EXTERNALVCC 0x1
#define SSD1306_SWITCHCAPVCC 0x2
// Scrolling #defines
#define SSD1306_ACTIVATE_SCROLL 0x2F
#define SSD1306_DEACTIVATE_SCROLL 0x2E
#define SSD1306_SET_VERTICAL_SCROLL_AREA 0xA3
#define SSD1306_RIGHT_HORIZONTAL_SCROLL 0x26
#define SSD1306_LEFT_HORIZONTAL_SCROLL 0x27
#define SSD1306_VERTICAL_AND_RIGHT_HORIZONTAL_SCROLL 0x29
#define SSD1306_VERTICAL_AND_LEFT_HORIZONTAL_SCROLL 0x2A
class Adafruit_SSD1306 : public Adafruit_GFX {
public:
Adafruit_SSD1306(int8_t SID, int8_t SCLK, int8_t DC, int8_t RST, int8_t CS);
Adafruit_SSD1306(int8_t DC, int8_t RST, int8_t CS);
Adafruit_SSD1306(int8_t RST);
void begin(uint8_t switchvcc = SSD1306_SWITCHCAPVCC, uint8_t i2caddr = SSD1306_I2C_ADDRESS);
void ssd1306_command(uint8_t c);
void ssd1306_data(uint8_t c);
void clearDisplay(void);
void invertDisplay(uint8_t i);
void display();
void startscrollright(uint8_t start, uint8_t stop);
void startscrollleft(uint8_t start, uint8_t stop);
void startscrolldiagright(uint8_t start, uint8_t stop);
void startscrolldiagleft(uint8_t start, uint8_t stop);
void stopscroll(void);
void dim(bool dim);
void drawPixel(int16_t x, int16_t y, uint16_t color);
virtual void drawFastVLine(int16_t x, int16_t y, int16_t h, uint16_t color);
virtual void drawFastHLine(int16_t x, int16_t y, int16_t w, uint16_t color);
private:
int8_t _i2caddr, _vccstate, sid, sclk, dc, rst, cs;
void fastSPIwrite(uint8_t c);
boolean hwSPI;
inline void drawFastVLineInternal(int16_t x, int16_t y, int16_t h, uint16_t color) __attribute__((always_inline));
inline void drawFastHLineInternal(int16_t x, int16_t y, int16_t w, uint16_t color) __attribute__((always_inline));
};






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments