




Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
The objective of this project is to solve the problem of thievery in our college hostels. Hence, after a significant amount of brainstorming we isolated the source of the problem.
The main cause of robbery in our hostel rooms was simply because the owners of the would carelessly leave their rooms unlocked and unattended. If the thief was rendered unable to enter the room, all chances of theft would then be nullified.
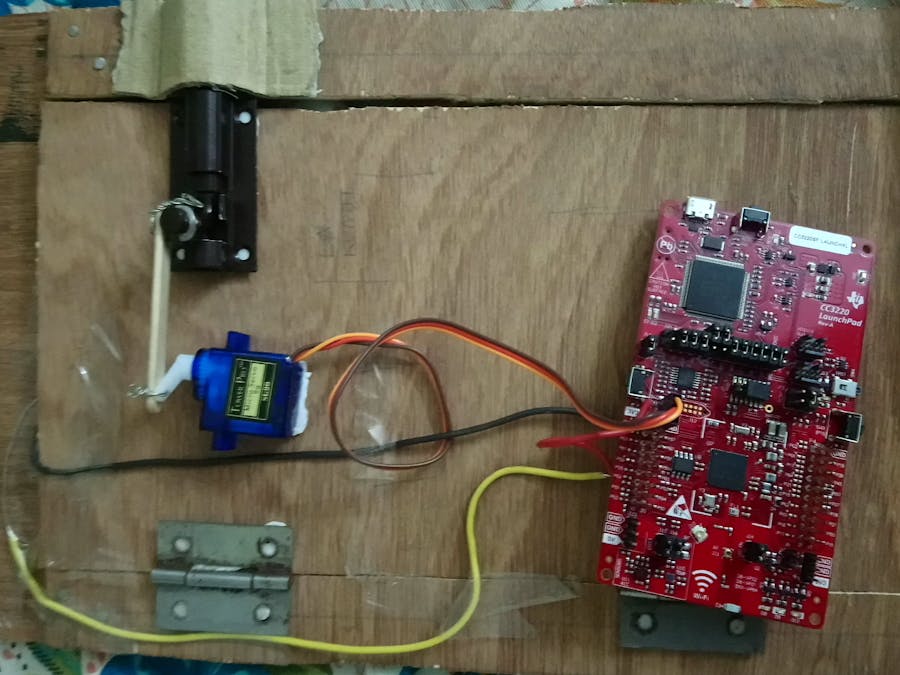
Once we realized this much, finding a solution was child's play. It was simple... The main concept of our project would be to make a self locking door.
On top of this, we further added a few features. The user can unlock the door remotely as well as using Hand Gestures.
WorkingRemote Unlocking
The micro-controller connects to the internet and so does the user's phone. Through this common internet connection, the user can unlock his/her room door on the press of a button.
Gesture Detection
The user merely has to show the correct hand sign which is recognized by the system using OpenCV. If the expected hand sign is show by the user then the door is unlocked.
Remote Unlock
C/C++#include <WiFi.h>
int servo = 9;
int angle;
int pwm;
// your network name also called SSID
char ssid[] = "NITK-NET";
// your network password
char password[] = "2K16NITK";
// your network key Index number (needed only for WEP)
int keyIndex = 0;
WiFiServer server(80);
void setup() {
Serial.begin(115200); // initialize serial communication
pinMode(RED_LED, OUTPUT); // set the LED pin mode
pinMode(servo, OUTPUT);
// attempt to connect to Wifi network:
Serial.print("Attempting to connect to Network named: ");
// print the network name (SSID);
Serial.println(ssid);
// Connect to WPA/WPA2 network. Change this line if using open or WEP network:
WiFi.begin(ssid, password);
while ( WiFi.status() != WL_CONNECTED) {
// print dots while we wait to connect
Serial.print(".");
delay(300);
}
Serial.println("\nYou're connected to the network");
Serial.println("Waiting for an ip address");
while (WiFi.localIP() == INADDR_NONE) {
// print dots while we wait for an ip addresss
Serial.print(".");
delay(300);
}
Serial.println("\nIP Address obtained");
// you're connected now, so print out the status
printWifiStatus();
Serial.println("Starting webserver on port 80");
server.begin(); // start the web server on port 80
Serial.println("Webserver started!");
}
void loop() {
int i = 0;
WiFiClient client = server.available(); // listen for incoming clients
if (client) { // if you get a client,
Serial.println("new client"); // print a message out the serial port
char buffer[150] = {0}; // make a buffer to hold incoming data
while (client.connected()) { // loop while the client's connected
if (client.available()) { // if there's bytes to read from the client,
char c = client.read(); // read a byte, then
Serial.write(c); // print it out the serial monitor
if (c == '\n') { // if the byte is a newline character
// if the current line is blank, you got two newline characters in a row.
// that's the end of the client HTTP request, so send a response:
if (strlen(buffer) == 0) {
// HTTP headers always start with a response code (e.g. HTTP/1.1 200 OK)
// and a content-type so the client knows what's coming, then a blank line:
client.println("HTTP/1.1 200 OK");
client.println("Content-type:text/html");
client.println();
// the content of the HTTP response follows the header:
client.println("<html><head><title>Energia CC3200 WiFi Web Server</title></head><body align=center>");
client.println("<h1 align=center><font color=\"red\">Welcome to the CC3200 WiFi Web Server</font></h1>");
client.print("RED LED <button onclick=\"location.href='/H'\">HIGH</button>");
client.println(" <button onclick=\"location.href='/L'\">LOW</button><br>");
// The HTTP response ends with another blank line:
client.println();
// break out of the while loop:
break;
}
else { // if you got a newline, then clear the buffer:
memset(buffer, 0, 150);
i = 0;
}
}
else if (c != '\r') { // if you got anything else but a carriage return character,
buffer[i++] = c; // add it to the end of the currentLine
}
// Check to see if the client request was "GET /H" or "GET /L":
if (endsWith(buffer, "GET /H")) {
digitalWrite(RED_LED, HIGH); // GET /H turns the LED on
for (angle = 0; angle <= 140; angle += 5) {
servoPulse(servo, angle); }
//for (angle = 140; angle >= 0; angle -= 5) {
// servoPulse(servo, angle); }
}
if (endsWith(buffer, "GET /L")) {
digitalWrite(RED_LED, LOW); // GET /L turns the LED off
for (angle = 140; angle >= 0; angle -= 5) {
servoPulse(servo, angle); }
//myservo.write(0);
//delay(100);
}
}
}
// close the connection:
client.stop();
Serial.println("client disonnected");
}
}
//
//a way to check if one array ends with another array
//
boolean endsWith(char* inString, char* compString) {
int compLength = strlen(compString);
int strLength = strlen(inString);
//compare the last "compLength" values of the inString
int i;
for (i = 0; i < compLength; i++) {
char a = inString[(strLength - 1) - i];
char b = compString[(compLength - 1) - i];
if (a != b) {
return false;
}
}
return true;
}
void printWifiStatus() {
// print the SSID of the network you're attached to:
Serial.print("SSID: ");
Serial.println(WiFi.SSID());
// print your WiFi IP address:
IPAddress ip = WiFi.localIP();
Serial.print("IP Address: ");
Serial.println(ip);
// print the received signal strength:
long rssi = WiFi.RSSI();
Serial.print("signal strength (RSSI):");
Serial.print(rssi);
Serial.println(" dBm");
// print where to go in a browser:
Serial.print("To see this page in action, open a browser to http://");
Serial.println(ip);
}
void servoPulse (int servo, int angle)
{
pwm = (angle*11) + 500; // Convert angle to microseconds
digitalWrite(servo, HIGH);
delayMicroseconds(pwm);
digitalWrite(servo, LOW);
delay(50); // Refresh cycle of servo
}
Gesture Detection
Python # Imports
import numpy as np
import cv2
import math
import serial
import time
import random
# Open Camera
capture = cv2.VideoCapture(0)
CCSerial = serial.Serial('com7', 115200)
time.sleep(2)
label1 = random.randint(1,5)
print(label1)
arr = []
while len(arr) < 200:
# Capture frames from the camera
ret, frame = capture.read()
# Get hand data from the rectangle sub window
cv2.rectangle(frame, (100, 100), (300, 300), (0, 255, 0), 0)
crop_image = frame[100:300, 100:300]
# Apply Gaussian blur
blur = cv2.GaussianBlur(crop_image, (3, 3), 0)
# Change color-space from BGR -> HSV
hsv = cv2.cvtColor(blur, cv2.COLOR_BGR2HSV)
# Create a binary image with where white will be skin colors and rest is black
mask2 = cv2.inRange(hsv, np.array([2, 0, 0]), np.array([20, 255, 255]))
# Kernel for morphological transformation
kernel = np.ones((5, 5))
# Apply morphological transformations to filter out the background noise
dilation = cv2.dilate(mask2, kernel, iterations=1)
erosion = cv2.erode(dilation, kernel, iterations=1)
# Apply Gaussian Blur and Threshold
filtered = cv2.GaussianBlur(erosion, (3, 3), 0)
ret, thresh = cv2.threshold(filtered, 90, 255, 0)
# Show threshold image
cv2.imshow("Thresholded", thresh)
# Find contours
image, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
try:
# Find contour with maximum area
contour = max(contours, key=lambda x: cv2.contourArea(x))
# Create bounding rectangle around the contour
x, y, w, h = cv2.boundingRect(contour)
cv2.rectangle(crop_image, (x, y), (x + w, y + h), (0, 0, 255), 0)
# Find convex hull
hull = cv2.convexHull(contour)
# Draw contour
drawing = np.zeros(crop_image.shape, np.uint8)
cv2.drawContours(drawing, [contour], -1, (0, 255, 0), 0)
cv2.drawContours(drawing, [hull], -1, (0, 0, 255), 0)
# Find convexity defects
hull = cv2.convexHull(contour, returnPoints=False)
defects = cv2.convexityDefects(contour, hull)
# Use cosine rule to find angle of the far point from the start and end point i.e. the convex points (the finger
# tips) for all defects
count_defects = 0
for i in range(defects.shape[0]):
s, e, f, d = defects[i, 0]
start = tuple(contour[s][0])
end = tuple(contour[e][0])
far = tuple(contour[f][0])
a = math.sqrt((end[0] - start[0]) ** 2 + (end[1] - start[1]) ** 2)
b = math.sqrt((far[0] - start[0]) ** 2 + (far[1] - start[1]) ** 2)
c = math.sqrt((end[0] - far[0]) ** 2 + (end[1] - far[1]) ** 2)
angle = (math.acos((b ** 2 + c ** 2 - a ** 2) / (2 * b * c)) * 180) / 3.14
# if angle > 90 draw a circle at the far point
if angle <= 90:
count_defects += 1
cv2.circle(crop_image, far, 1, [0, 0, 255], -1)
cv2.line(crop_image, start, end, [0, 255, 0], 2)
arr.append(count_defects)
# Print number of fingers
if count_defects == 1:
cv2.putText(frame, "ONE", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 2,(0,0,255),2)
elif count_defects == 2:
cv2.putText(frame, "TWO", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 2,(0,0,255), 2)
elif count_defects == 3:
cv2.putText(frame, "THREE", (5, 50), cv2.FONT_HERSHEY_SIMPLEX, 2,(0,0,255), 2)
elif count_defects == 4:
cv2.putText(frame, "FOUR", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 2,(0,0,255), 2)
elif count_defects == 5:
cv2.putText(frame, "FIVE", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 2,(0,0,255), 2)
else:
pass
except:
pass
# Show required images
cv2.imshow("Gesture", frame)
all_image = np.hstack((drawing, crop_image))
cv2.imshow('Contours', all_image)
# Close the camera if 'q' is pressed
if cv2.waitKey(1) == ord('q'):
break
labell = max(set(arr), key=arr.count)
if(labell==label1):
data = CCSerial.write('1'.encode('utf-8'))
print(labell)
else:
data = CCSerial.write('0'.encode('utf-8'))
print(labell)
capture.release()
cv2.destroyAllWindows()







Comments