






Hardware components | ||||||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 3 | ||||
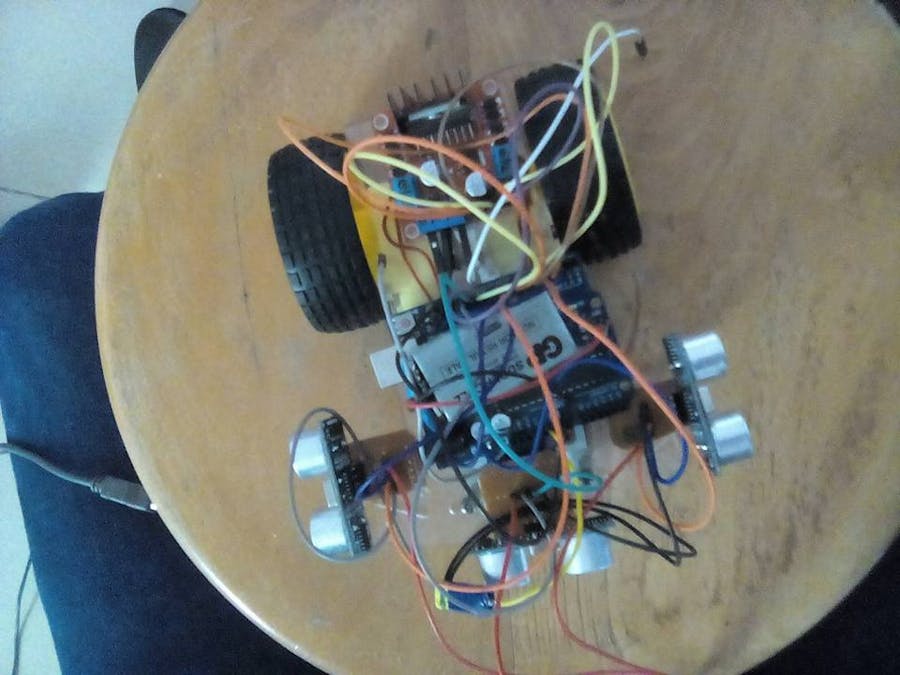
we have a task to solve this Maze with a car start from any Door then it will reach the Out Door without any Outside help out any Control
/*this code created by Mostafa salah zaghloul for سمينا بنفسك Team
*first trial at 9:55 pm on fri 2/10/2015
*secound trial at 00:30 am on 5/10/2015
*third trial at 11pm on 8/10/2015
*
*
*/
//motor A
#define en1 9
#define in1 4
#define in2 5
//motor b
#define en2 3
#define in3 6
#define in4 7
int front_trig = A4;
int front_echo = A5;
int left_trig = A2;
int left_echo = A3;
int right_trig = A0;
int right_echo = A1;
//distance,time
long front_time, front_dis, right_time, right_dis, left_time, left_dis;
void setup() {
pinMode(front_trig, OUTPUT);
pinMode(front_echo, INPUT);
pinMode(left_trig, OUTPUT);
pinMode(left_echo, INPUT);
pinMode(right_trig, OUTPUT);
pinMode(right_echo, INPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(en1, OUTPUT);
pinMode(en2, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(front_trig, LOW);
delayMicroseconds(2);
digitalWrite(front_trig, HIGH);
delayMicroseconds(5);
digitalWrite(front_trig, LOW);
front_time = pulseIn(front_echo, HIGH);
front_dis = front_time/ 29 / 2;
digitalWrite(left_trig, LOW);
delayMicroseconds(2);
digitalWrite(left_trig, HIGH);
delayMicroseconds(5);
digitalWrite(left_trig, LOW);
left_time= pulseIn(left_echo, HIGH);
left_dis= left_time / 29 / 2;
digitalWrite(right_trig, LOW);
delayMicroseconds(2);
digitalWrite(right_trig, HIGH);
delayMicroseconds(5);
digitalWrite(right_trig, LOW);
right_time = pulseIn(right_echo, HIGH);
right_dis = right_time / 29 / 2;
Serial.print(right_dis);
Serial.print(":");
Serial.print(front_dis);
Serial.print(":");
Serial.println(left_dis);
if (right_dis <= 6&& left_dis <= 6&& front_dis>5){
forward();
}
else if(right_dis > 6&&left_dis <= 6&& front_dis>5){
right();
}else if (left_dis >6&&right_dis <= 6&& front_dis>5){
left();
}
}
void right() {
analogWrite(en1,255);
analogWrite(en2,255);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void Stop () {
analogWrite(en1, 0);
analogWrite(en2, 0);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void left() {
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void forward() {
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void back(){
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, LOW);
digitalWrite(in2,HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}
/*this code created by Mostafa salah zaghloul for سمينا بنفسك Team
*first trial at 9:55 pm on fri 2/10/2015
*secound trial at 00:30 am on 5/10/2015
*third trial at 11pm on 8/10/2015
*
*
*/
//motor A
#define en1 9
#define in1 4
#define in2 5
//motor b
#define en2 3
#define in3 6
#define in4 7
int front_trig = A4;
int front_echo = A5;
int left_trig = A2;
int left_echo = A3;
int right_trig = A0;
int right_echo = A1;
//distance,time
long front_time, front_dis, right_time, right_dis, left_time, left_dis;
void setup() {
pinMode(front_trig, OUTPUT);
pinMode(front_echo, INPUT);
pinMode(left_trig, OUTPUT);
pinMode(left_echo, INPUT);
pinMode(right_trig, OUTPUT);
pinMode(right_echo, INPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(en1, OUTPUT);
pinMode(en2, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(front_trig, LOW);
delayMicroseconds(2);
digitalWrite(front_trig, HIGH);
delayMicroseconds(5);
digitalWrite(front_trig, LOW);
front_time = pulseIn(front_echo, HIGH);
front_dis = front_time/ 29 / 2;
digitalWrite(left_trig, LOW);
delayMicroseconds(2);
digitalWrite(left_trig, HIGH);
delayMicroseconds(5);
digitalWrite(left_trig, LOW);
left_time= pulseIn(left_echo, HIGH);
left_dis= left_time / 29 / 2;
digitalWrite(right_trig, LOW);
delayMicroseconds(2);
digitalWrite(right_trig, HIGH);
delayMicroseconds(5);
digitalWrite(right_trig, LOW);
right_time = pulseIn(right_echo, HIGH);
right_dis = right_time / 29 / 2;
Serial.print(right_dis);
Serial.print(":");
Serial.print(front_dis);
Serial.print(":");
Serial.println(left_dis);
if (right_dis <= 6&& left_dis <= 6&& front_dis>5){
forward();
}
else if(right_dis > 6&&left_dis <= 6&& front_dis>5){
right();
}else if (left_dis >6&&right_dis <= 6&& front_dis>5){
left();
}
}
void right() {
analogWrite(en1,255);
analogWrite(en2,255);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void Stop () {
analogWrite(en1, 0);
analogWrite(en2, 0);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void left() {
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void forward() {
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void back(){
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, LOW);
digitalWrite(in2,HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}
/*this code created by Mostafa salah zaghloul for سمينا بنفسك Team
*first trial at 9:55 pm on fri 2/10/2015
*secound trial at 00:30 am on 5/10/2015
*third trial at 11pm on 8/10/2015
*
*
*/
//motor A
#define en1 9
#define in1 4
#define in2 5
//motor b
#define en2 3
#define in3 6
#define in4 7
int front_trig = A4;
int front_echo = A5;
int left_trig = A2;
int left_echo = A3;
int right_trig = A0;
int right_echo = A1;
//distance,time
long front_time, front_dis, right_time, right_dis, left_time, left_dis;
void setup() {
pinMode(front_trig, OUTPUT);
pinMode(front_echo, INPUT);
pinMode(left_trig, OUTPUT);
pinMode(left_echo, INPUT);
pinMode(right_trig, OUTPUT);
pinMode(right_echo, INPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(en1, OUTPUT);
pinMode(en2, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(front_trig, LOW);
delayMicroseconds(2);
digitalWrite(front_trig, HIGH);
delayMicroseconds(5);
digitalWrite(front_trig, LOW);
front_time = pulseIn(front_echo, HIGH);
front_dis = front_time/ 29 / 2;
digitalWrite(left_trig, LOW);
delayMicroseconds(2);
digitalWrite(left_trig, HIGH);
delayMicroseconds(5);
digitalWrite(left_trig, LOW);
left_time= pulseIn(left_echo, HIGH);
left_dis= left_time / 29 / 2;
digitalWrite(right_trig, LOW);
delayMicroseconds(2);
digitalWrite(right_trig, HIGH);
delayMicroseconds(5);
digitalWrite(right_trig, LOW);
right_time = pulseIn(right_echo, HIGH);
right_dis = right_time / 29 / 2;
Serial.print(right_dis);
Serial.print(":");
Serial.print(front_dis);
Serial.print(":");
Serial.println(left_dis);
if (right_dis <= 6&& left_dis <= 6&& front_dis>5){
forward();
}
else if(right_dis > 6&&left_dis <= 6&& front_dis>5){
right();
}else if (left_dis >6&&right_dis <= 6&& front_dis>5){
left();
}
}
void right() {
analogWrite(en1,255);
analogWrite(en2,255);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void Stop () {
analogWrite(en1, 0);
analogWrite(en2, 0);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void left() {
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void forward() {
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void back(){
analogWrite(en1, 255);
analogWrite(en2, 255);
digitalWrite(in1, LOW);
digitalWrite(in2,HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}

6 projects • 19 followers
mostafa zaghloul a communication engineer student at "Egypt's Higher Institute Mansoura"




Comments