







Hardware components | ||||||
| × | 1 | ||||
 |
| × | 4 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
What is the Driver Input Module?
The Driver Input Module (DIM) is a Texas Instruments MSP430G2ET (implemented with a G2553 integrated circuit) micro-controller with the requirements of handling driver input of Lithium, UC Irvine’s 2019 FSAE Electric Racecar competing in Lincoln, Nebraska. The driver input includes two independent Accelerator Pedal Position Sensors (APPS), one Brake System Encoder (BSE), and one Steering Angle Position Sensor (SAPS). These inputs are processed by the DIM, and pulse-width-modulation (PWM) signals are calculated and sent to their respective motor controller. These signals are computed using a torque vectoring algorithm which increases the torque to the outside wheel during a turn.
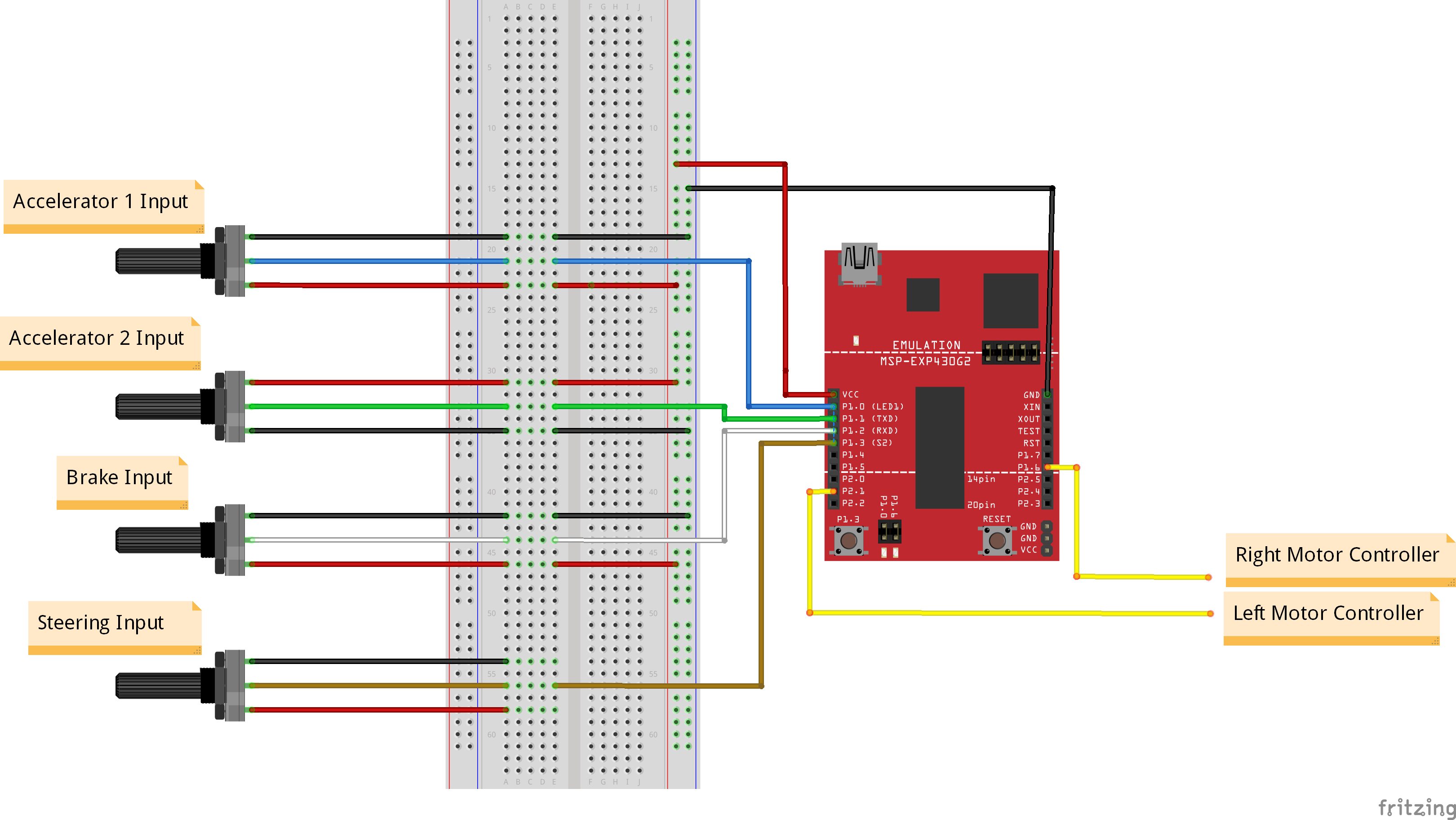
Context of the DIM:The figure below describes the context of the DIM. The driver input sensors (APPS, BSE, and SAPS) are analog potentiometers ranging from 0V-5V connected to the Analog-to-Digital Converter (ADC) of the DIM. The DIM utilizes this input data to check for faults in the system on a software level, and to calculate the two independent throttle signals sent to the motor controllers. The voltage and ground are switched for the Accelerator 2 potentiometer due to the need for the Accelerator 1 and Accelerator 2 input signals to have different transfer functions. The different transfer function is accounted for in the software.
Description of the Faults:
“Faults” were previously mentioned and are critical to the design of the DIM for a tech-ready racecar. Faults can arise if the accelerator (depressed at >20%) and brake pedal are actuated at the same time, if there is a floating input voltage in either sensor, or if there is different APPS voltages between the two independent inputs. These faults are defined as a “plausibility” by the FSAE rulebook, and must be accounted for in our Failure Mode Effect Analysis (FMEA). If a plausibility occurs, the DIM will send throttle values of zero until the fault is cleared.
Why is DIM important?
The DIM is essential for Lithium to be safe and tech-ready for final competition in Lincoln, Nebraska. This system is used to detect faults to prevent the racecar from transmitting incorrect pedal values for safe operation. Furthermore, the DIM provides hands-on experience with a micro-controller for UC Irvine undergraduate Computer Engineers. DIM has been in development since the beginning of Fall 2018 quarter and is expected to be integration ready by February of 2019.
Updates:
2/12/2019
- First iteration of DIM complete (ADC input, PWM output).
- Design phase has begun for implementing CAN Bus communication utilizing MCP2515 CAN Controller and TJA1050 CAN Transceiver. This will modularize the embedded system by allowing communication between multiple micro-controllers.











{kind=link}
Comments