

Solder it up!
Follow these first few steps to assemble your Capacitive Touch Backpack with a soldering iron and heat gun. If you're new to surface-mount soldering, we'll teach you!
Bill o' Materials
Here's what you'll need:
- Pinoccio Scout (Field Scout, $59)
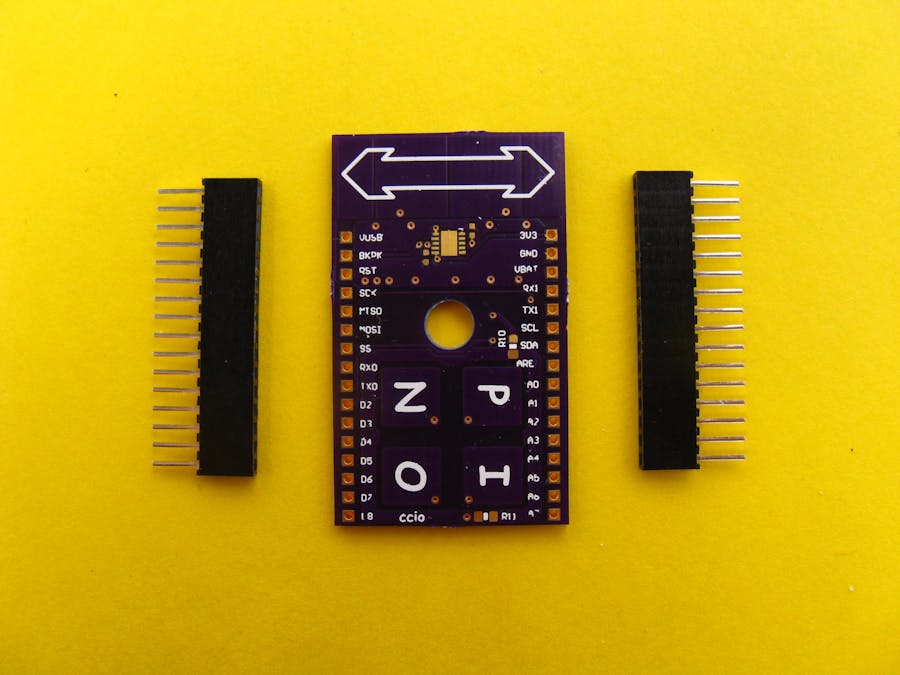
- Capacitive Touch Backpack (available in groups of three for $8.50)
- Pinoccio headers (One set of two headers, $5)
- 8 x 1 mΩ surface-mount resistors
- 8 x 0 Ω surface-mount resistors
And for tools:
- Soldering iron and thin solder
- Flux
- Heat gun
- Tweezers
Tips and Extras
- When you're first taking your resistors out, take out exactly the number you'll need for the current board. This builds in an error-check, since it can be tough to tell if something's missing just by looking at the circuit board.
- Keep them on something with a contrasting, solid-color background so they're easy to spot. These things are tiny!
- After you've soldered on the headers, you can trim off the top sockets to save space, since you may only need the pins on the bottom. Use strong tweezers (or even your wire cutters) to grab the black plastic on one end and lift it away from the PCB. Then, pull the other end off. You may have to do a little at a time. Then, use the wire cutters to trim off the shiny silver "claws" that were inside the plastic headers.
- Why a 0 ohm resistor, you ask? These are sometimes used in cases where multiple versions of a board are available. This makes them easy to assemble without switching tools. In our case, the backpack was designed by a community member *before he even got his Pinoccio.* (How's that for impressive?) He didn't know what values would be needed for the resistors until he got his Scouts.
Trimming the headers
Upload this to your board from the Arduino IDE...
Enter these functions in the HQ Console...
...and you're good to go!
Plug in your new capacitive touch backpack, and build something new.

153 projects • 1638 followers
Hackster Pro Partner; the Hackster team's resident Hardware Nerd for 10 years. Robots, music, EEG, wearables, languages; FIRST Robotics kid.


Comments