

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 13 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 13 | ||||
| × | 1 | ||||
| × | 14 | ||||
| × | 1 | ||||
| × | 3 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 14 | ||||
| × | 14 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
 |
| |||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
大陆读者请移步优酷 (readers from mainland China can see it here):
http://v.youku.com/v_show/id_XMzQxMzA1NjM0OA==.html?spm=a2h3j.8428770.3416059.1
Update Jul 2022:
Watch the agility of OpenCat's second model, Bittle, in a football game:
Update Dec 2021:
You can order our two mass-produced models based on OpenCat on our official online store: www.petoi.com/store
Update Oct 2018:
There’s a new Hackster post on Nybble.
You can subscribe to Petoi.com or to my Twitter account at https://twitter.com/PetoiCamp for updates. The codes are posted on GitHub: https://github.com/PetoiCamp/OpenCat.
Thank you!
Mentioned on IEEE: Spectrum:
The Next Web:
------
Update Aug 2020:
I'm launching our second product, Petoi Bittle, on Kickstarter! https://www.kickstarter.com/projects/petoi/bittle
------
Hi,
You may have seen Boston Dynamics' Dogs and the recently released Sony Aibo. They are super cool, but are too expensive to enjoy. I hope to provide some affordable alternatives that have most of their motion capabilities. I'm not saying I can reproduce the precise motions of those robotics giants. I'm just breaking down the barrier from a million dollars to hundreds. I don't expect to send it to the battlefield or other challenging realities. I just want to fit this naughty buddy into a clean, smart, yet too-quiet house.
With very limited resources and knowledge, I started small. A smaller structure avoids many of the engineering challenges of larger models. It also allows for faster iteration and optimization, just as rats adapt faster than elephants. Regardless of the hardware, the major control algorithm could be shared once the accurate mapping of DoFs is achieved. I derived a motion algorithm (with a dozen parameters) for multiple gaits. The historic fastest speed was over 3 body lengths/sec, achieved with trotting (2-leg-in-air). As I constantly add new components and change the CoM, while the adaptive part is not good enough, I reserve the tuning time for finalized models.
The motion algorithm is currently implemented on a 32KB, 16MHz Arduino board, using up its system resources with algorithmic optimization almost everywhere. I'm going to switch to a 256KB, 48MHz board to boost the performance of active adaptation and allow additional code from future users. The motion is actuated by hobby-level (but still robust, digital & metal gear) servos, considering the price. Some elastic structures were introduced to dampen the shock and protect the hardware.
On top of the motion module is a RasPi. The Pi takes no responsibility for controlling detailed limb movements. It focuses on more serious questions, such as "Who am I? Where do I come from? Where am I going?" It generates the mind and sends string commands to the Arduino slave. Motion instructions can still be sent to the Arduino more slowly. A human remote sits in the middle to intercept the robot's control of its own body. It will still hold certain instincts, like refusing to jump down a cliff.
Currently, I have two functional prototypes:
* The mini model is a stand-alone 8-DoF (supports up to 16-DoF) Arduino motion module that holds all skills for multiple gaits and real-time adaptation. The codes are compatible with the full version, but only to change one parameter. The mount dimension matches those of a RasPi board. So it can also be a "leg-hat" for your existing project. With some enhanced "carrier" configuration, it can carry about 1kg of additional weight (but walks more slowly, of course). It's targeted at STEM education and the Maker community. The price will be similar to some robotic car kits.
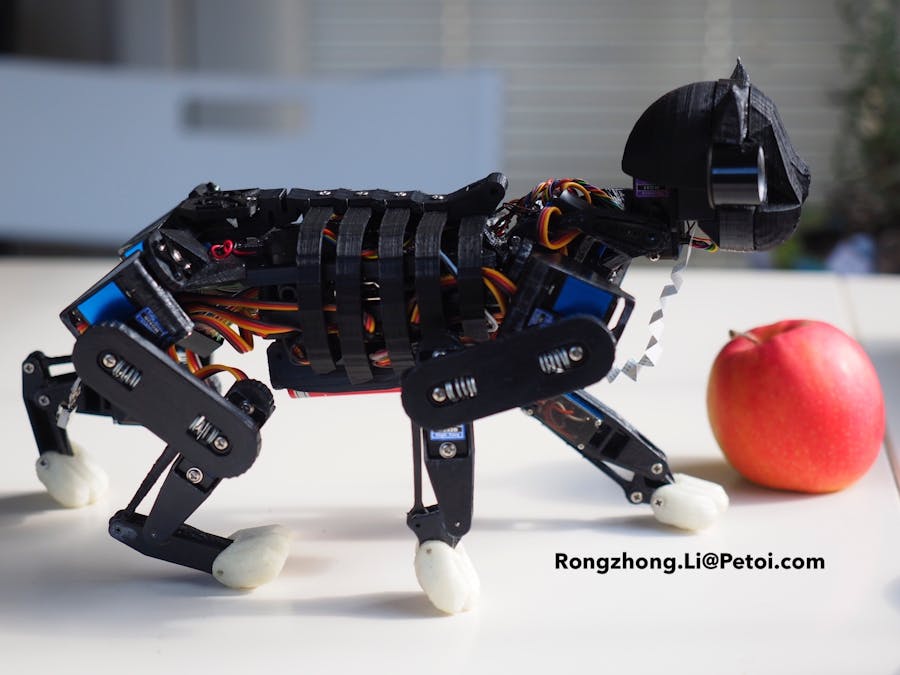
* The full version uses a Pi for more AI-enhanced perception and instructs an upgraded 16-DoF motion module. Besides Pi's wifi and Bluetooth, it also carries ground contact, touch, infrared, distance, voice, and night vision interfaces. All modules have been tested on their lightweight bodies. It also adopts some bionic skeleton designs to make it morphologically resemble a cat. It's targeted at the consumer market with fewer tech backgrounds. You can imagine it as a legged Android phone or an Alexa device with an app store for third-party extensions. It can continuously run at about 2.6 body lengths/sec for 60 mins or stream videos for several hours. I also reserved some space below the spine for additional boards (such as a GPS). I have a regular routine for duplicating the model, but I need better industrialization to reduce the labor. I expect the price to be close to that of a smartphone.
* I also have an obsolete version that uses only Pi for controlling both AI and motion. All code was written in Python. The movement is not as good if it's running intensive AI tasks.
I bought my first Raspberry Pi in June 2016 to learn coding for hardware. To express my joy when I first lit an LED with the spark from Pi, I wrote a Chinese quatrain:
启蒙
夜闻禽兽想炊烟,斑白胼胝枉瘦田。
仙界私厨失圣火,人间春事已燎原。
which literally means:
Enlightenment
Beasts cry through the night; I dream of cooking smoke.
White-haired hands, callused, toil upon lean fields in vain.
A sacred flame slips from the gods’ own kitchen.
Soon, spring fires spread across the human world.”
This robot served as my playground for learning all the components in a regular Raspberry Pi beginner kit. I started with craft sticks, then switched to 3D-printed frames to optimize performance and morphology. An Arduino was introduced in Jul.2017 for better movement. The 7 major iterations were made between Jul.2016 and Sep.2017. No significant progress has been made since last September, when I got distracted from increasing job duties, company formation, and patent writing.
I'm now teaching a university robotics class using the Mini kit. I hope to sell more kits to validate the market and generate revenue to keep the project going. The full version is yet to be polished. I'm also applying for several accelerators and will probably try Indiegogo. Depending on where I can get the best support, I may start a business or make the project fully open source. Even as a commercial product, most codes will be open-sourced with the sale of kits.
I believe in the power of open-source if everyone could grab a robot and start soldering and coding. Rather than a final product, it shows the potential backed by a growing maker community. Users can focus on coding it on either the motion (Arduino with C) or the AI (Pi with Python) part. And the two can communicate through string tokens. It's also easy to teach new body languages and behaviors with a couple of lines of code. Anyone with prior knowledge of Arduino or Raspberry Pi can imagine its possible applications. I've been bored with those animal-shaped cars for years. Now kids can learn physics and coding on a new type of toy. Robotics experts can focus on their walking algorithms on a much cheaper platform. Software developers can write AI-enhanced applications on a pet-like robot, rather than a "wheeled iPad".
If you are interested in the cat and want one in your hands, please like the video and share it. I also love to see your comments to make it better. Your support will determine how soon it will be available on the market.
------------
I was amazed by your warm feedback. It's really encouraging!
I may forget to reply to some of your messages, so here I want to answer a few common questions:
----
* Sharing STL?
- The full version cat needs multiple precisely printed structures with various filaments. It requires ~2 days for printing and post-processing (which involves acetone). And they have to be assembled with specific accessories and tools. Some mechanisms are designed with a precision of <0.2mm, and I'm currently tuning them by careful filing. Even an alternative soldering or wiring method may cause trouble during assembly.
I think the most economical (and safest) way is to invest in an expensive injection mold and then go into mass production, at least for the key mechanical parts. Once I release the files and specifications, you will probably agree with that.
And I need time to put up good documentation. The mini version should come out much earlier.
----
* Sharing Codes?
- The project is published on https://github.com/PetoiCamp/OpenCat.
----
* Open-source?
- Open-source also needs some commercial operations to keep healthy. I'll try my best to balance everything. They are out of my expertise, and I have to learn. I do have to settle down and support my family, rather than sleeping alone in a foreign land. Sorry guys...I'm busy teaching 5-credit university classes just to pay my bills!
I hope to make the project support itself rather than begging for donations every year. For such a complicated system, I'm confident that mass production will bring the unit cost down compared to individual DIY efforts. By achieving that goal, hobbyists can still build this challenging project from source codes (and tens of accessories from the online stores), while the general public can simply enjoy the product at a lower price.
----
You can order our two mass-produced models based on OpenCat on our official online store: www.petoi.com/store





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments