


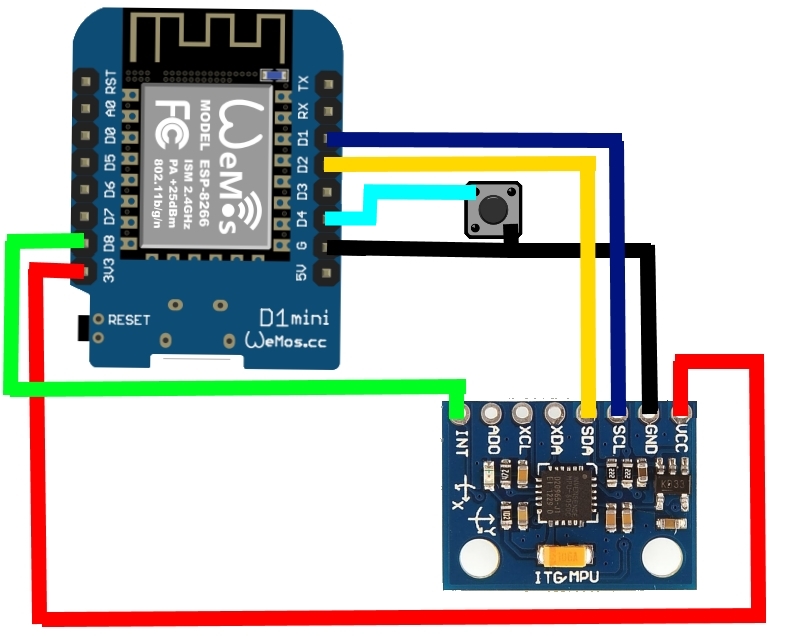
It is a controller that uses an accelerometer-gyroscope combination to report orientation and acceleration telemetry data to a PC via MQTT or UDP (similar to Wii controllers);
It is made with: ESP8266 + MPU6050 + lithium battery (the controller handle).
The MQTT Mosquitto server installed on a networked machine is also used, and a static web page that, connecting to the mqtt server, displays the result.
Version 1.1
is used a complementary filter to combine, without too many calculations, the linear accelerations of the accelerometer with the angular velocities of the gyroscope insides MPU5060.
(I had also done a test with a magnetometer, to automatically calibrate, but without great results)
Version 2.0
The Action Recognition Controller 2.0 uses the MPU5060's internal DMP (Digital Motion Processor) and InvenSense for automatic calibration;
this makes the sensor more precise, in fact we see that the movements are very stable.
As soon as it is started, it is necessary not to touch it for a few seconds so that, without movement, the automatic calibration takes place
{kind=link}

Comments