This turret was built as our entry for the Robu Creato 1.0 online hackathon.
We updated the turret to be Bluetooth controllable.
Idea
Our goal was to achieve maximum efficiency with minimum expenditure, a budget turret that would serve the purpose of navigation and firing. Thinking in this direction gave us the idea of using rubber bands as ammunition, owing to their excellent tensile strength and economic availability. Adding on, Balsa wood and superglue helped give our turret the perfect framework it required, making it light and sufficiently durable.We further wondered how we could make our turret look better, which led us to add a red laser pointer that would help improve accuracy along with adding a sweet look to the model.
The Build
1 / 3 • View 1 of the Turret
The turret has been modeled in the following fashion-
The Base
The base includes one servo linked with a shaft connected by a gear system with two gear cogs made of plastic
This servo is mounted on a piece of balsa wood cut according to size, Along with two more pieces of wood providing a stable framework for the rest of the turret to be mounted on
The base of the Turret.
The Motion
The First Servo controls the x-y plane of motion with the rest of the turret mounted on the topmost gear piece
The second servo attached to a screw to provide equal balance controls the z-axis motion of the main barrel of the turret.
The Second Servo
The Main Barrel
The main barrel
The main barrel works in the following manner -
A motor, which is connected to the circuit which is turned on with the help of the push button
The shaft of the motor controls the screw piece
Rubber bands are slung around the rubber band and the aim-support wood piece right in front of the screw.
As the screw rotates, the rubber bands move upwards and the tension of the rubber bands helps launch the bands in the same line of action as the aim support.
The added laser pointer helps assist in targeting the rubber bands at an object. This laser is turned on when the power source is switched on
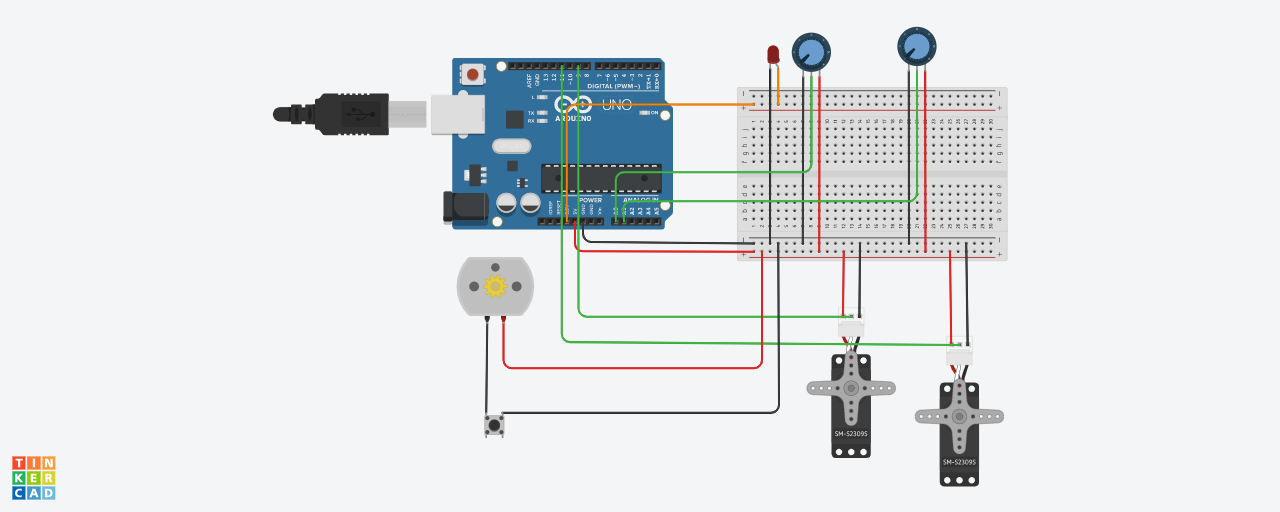
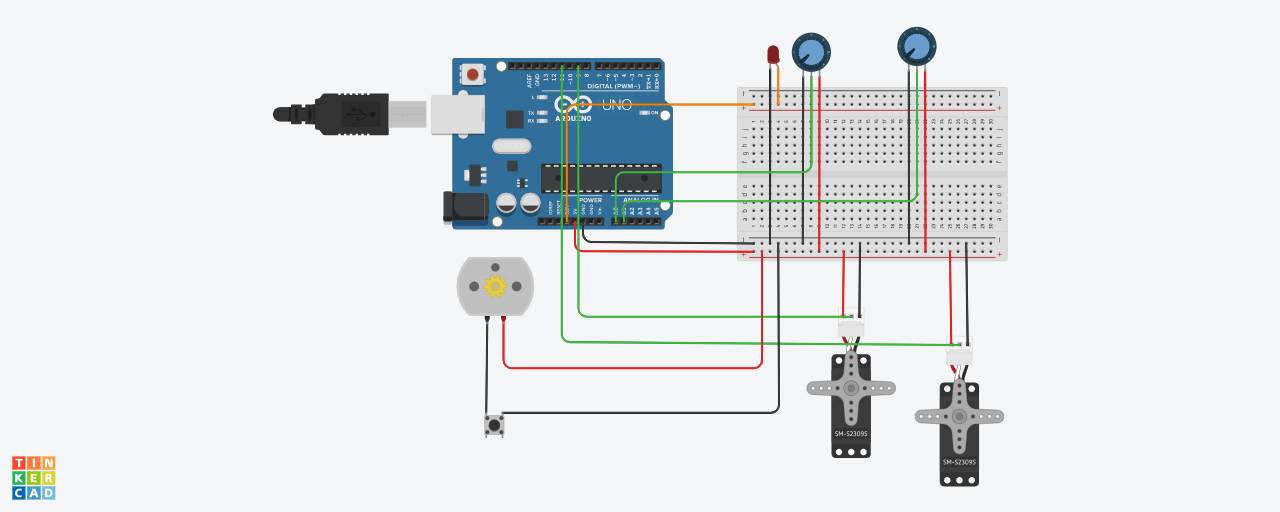
Controlling the Servos
To control the servos, we've used two potentiometers, one for each servo, which when turned on act as regulatory knobs using a basic knob code in the Arduino IDE. The voltage range of the potentiometer is converted to a range of angles (0 to 180) to enable sufficient control of each servo
Navigational Motion of the Turret
Firing Mechanism
Update
We modified the turret to be Bluetooth controllable. Using the MIT App Inventor and a HC05 Bluetooth module.
#include <Servo.h> // add servo libraryServo myservo; // create servo object to control a servo
Servo myservo2;int potpin=0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
int val1;void setup(){ myservo.attach(9); myservo2.attach(11);// attaches the servo on pin 9 to the servo object
}void loop(){val= analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)val= map(val, 0, 1023, 0, 180);val1= analogRead(potpin);val1= map(val1, 0,1023, 0, 180);// scale it to use it with the servo (value between 0 and 180) myservo.write(val); myservo2.write(val1); // sets the servo position according to the scaled value
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












{kind=link}
Comments