

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
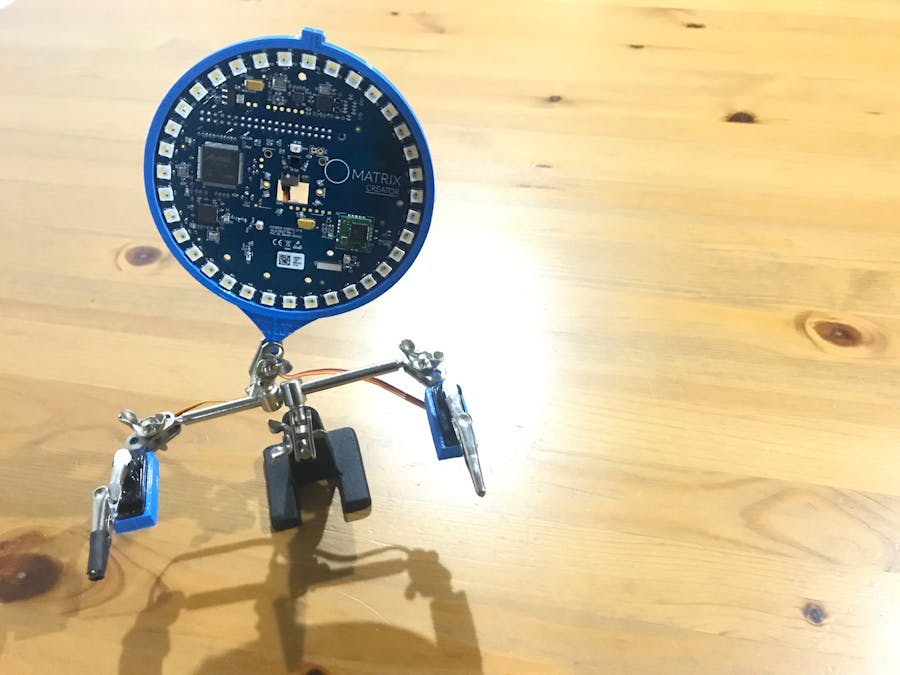
I've been wanting to build something with the MATRIX Creator and Snips.ai, but all my ideas were too involved to knock out over a weekend. And the magnifying glass on my third hand kept falling off. Eventually, I got mad enough at my janky third hand that I decided to replace it (after even hot-glue failed to secure the magnifying glass in its holder... again).
Now, I'm turning it into a smart little lab assistant! Threepio can hold things for me, and will eventually have a camera that he can use to take pictures of stuff, illuminating it with the Creator's built-in LED. I'll be able to trigger this using voice commands!
3D-printed partsI modeled the "wrists" and adjustable ring holder in OnShape:
You can copy and edit my designs via this workspace! I'm also working on a smaller version for the MATRIX Voice, which can run just on the built-in ESP32 (after programming it via a Raspberry Pi).
I printed my parts in sky blue ColorFabb filament.
ElectronicsThe electronic assembly was pretty simple – I attached the Raspberry Pi to the back of the MATRIX Creator, then wired the servos to pins 0 and 1, as well as 5V and GND. To do this, I stripped the ends of the servo wires and soldered them to female headers – with both positive wires attached to one header pin, and both ground wires on another. This allows me to cut down on spaghetti wiring and provides secure, but reconfigurable, connections.
I placed short pieces of heat-shrink along the length of the wires, to hold them together without the rigidity of a single big piece of tubing. There's still plenty of slack for me to move the claws around.
(In the current version, Thr33p10 is running off a Pi 4!)
This li'l guy is set up to stream directly to a service called LetsRobot.tv . It's created as a really positive space where anyone can jump into a robot and remotely control it through the browser, as well as sending chats that the robot will speak aloud! The creator, Jillian Ogle, is working on a replacement called remo.tv – but this is what I set up first, so I'm sticking with it for now.
To connect your robot to the service, follow these directions: https://letsrobot.readme.io/docs/connect-a-robot-to-letsrobottv
Right now, Thr33p10 doesn't have any motion capability, so I've enabled "dev mode" in the settings on the website, to save people confusion when the "left/right/forward/back" buttons don't work.
NFC security system using MATRIX CreatorAlfred and Samreen from the wonderful MATRIX Labs team helped me set this up! I ran into them at Arm TechCon, where they had some new demos showing off the Creator board's built-in NFC capabilities. Not only can you write data to a tag, but you can also read them and trigger code based on that! I realized this would be a sweet security system for Thr33p10.
So, we got together at the office and with their help (as well as Carlos chiming in from Miami), I coded up a system that:
- Waits to start the streaming until a tag is scanned;
- When the black "launch" tag is scanned, it starts streaming to LetsRobot AND turns on the "Everloop" rainbow LED pattern: this alerts you that you're live, and also gives a little extra light :)
- When the white "kill" tag is scanned, it stops streaming and turns off the ring light.
See the code at the bottom of this page for how it works. I'm still working on getting it to launch the Javascript when the Pi reboots, but the rest is working great!
This code is deployed in Javascript, using the MATRIX Lite guide. There are reference examples for the LEDs, sensors, built-in audio, and even servos! Perfect.
To keep it lightweight, I installed Raspbian Stretch Lite from the Raspberry Pi downloads page. Then, I completed the installation guide (linked above) over SSH; this does require first enabling WiFi and SSH on your Pi, which can be done from the command line via:
sudo raspi-configThis may require you to use a monitor and keyboard for the initial setup. Of course, I recommend also changing the password while you're at it.
The final step gave me a bunch of warnings and said, "found 1 high severity vulnerability" / "run `npm audit fix` to fix them, or `npm audit` for details", so I ran the suggested fix command. The feedback said "1 vulnerability required manual review and could not be updated", but I decided to keep going and see what happens.
Servo test
I also created a simple script to test the servo functionality. It worked, too – twitching motors!! But the servos sucked down too much power, and the Pi rebooted itself. Have to give it a separate power source! Fortunately, the power supply has decent amperage and I think I can cannibalize a Micro USB splitter cable from my Pi touchscreen kit, so the controller and motors can draw power separately. :)
See below for the servotest.js code, which I put together from the excellent reference documentation. I'll have to put up a video on this, as well.
In-progress video (interview with MATRIX Labs)I joined the MATRIX Labs weekly livestream to talk about this project and some other cool, nerdy hardware stuff. :)







Comments