


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
Be honest: who wants to crawl out of a warm car in the rain (or, even worse, after it) and trudge through clay just to lift a miserable barrier? We got fed up too—especially when it’s your own cozy corner and uninvited guests aren’t welcome. That’s when the idea struck: what if we could give our trusty old gate barrier a brain? And keep the budget from crying expensive tears? The goal seemed impossible (yet we spent far less than you’d think), and the solution turned out to be brilliantly simple. We took an old barrier, gave it a bit of an upgrade, added a couple of electronic brains—and voilà: goodbye, dirty boots!
Mission: Cheap and Tough (But Highly Effective!)Objective: Restrict access to the property without extra hassle or major spending.Approach: Breathe new life into an old barrier. We added an electronic heart powered by an ESP32, attached a motor, and now it opens on command. No frills—just hardcore functionality!
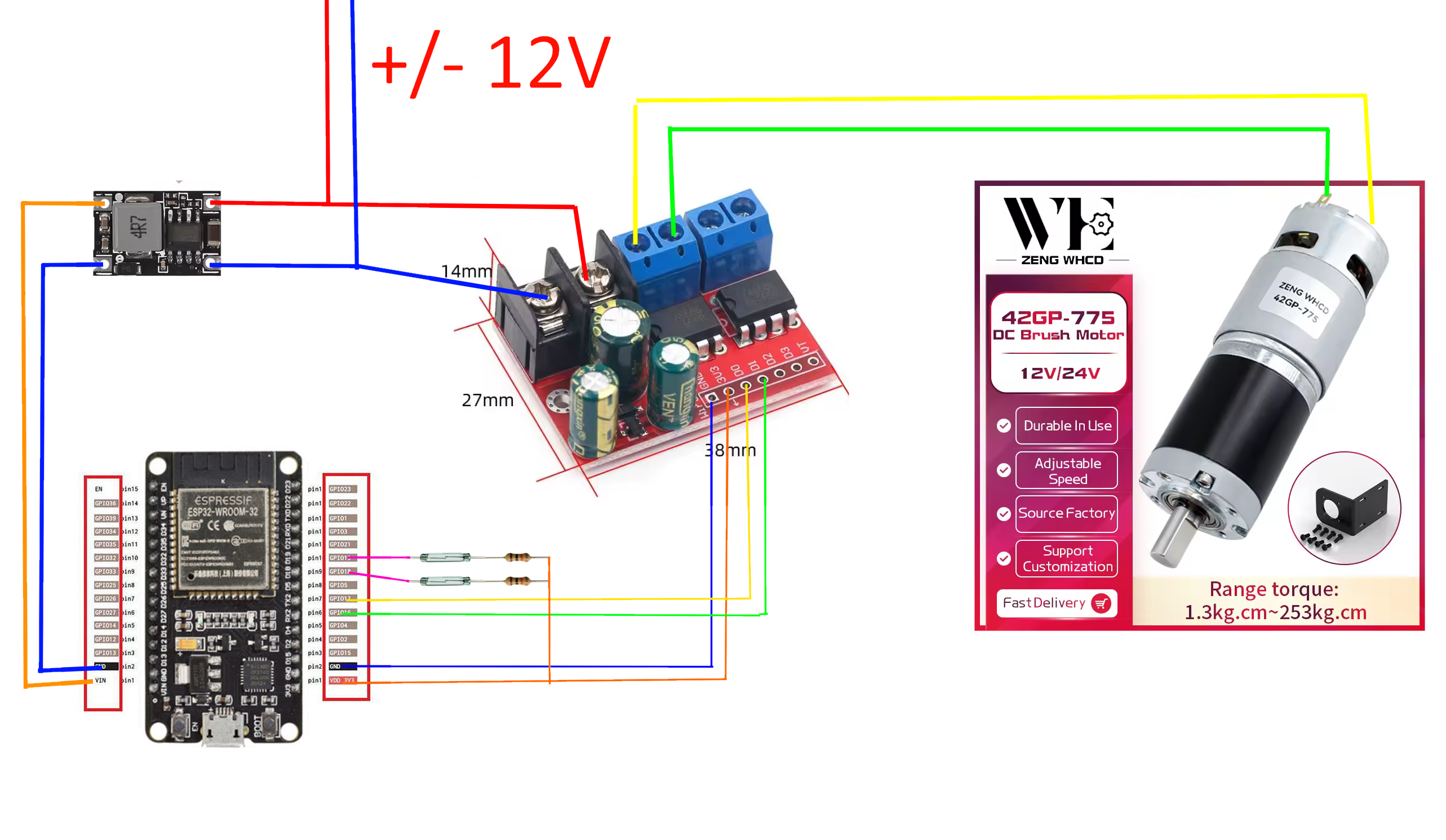
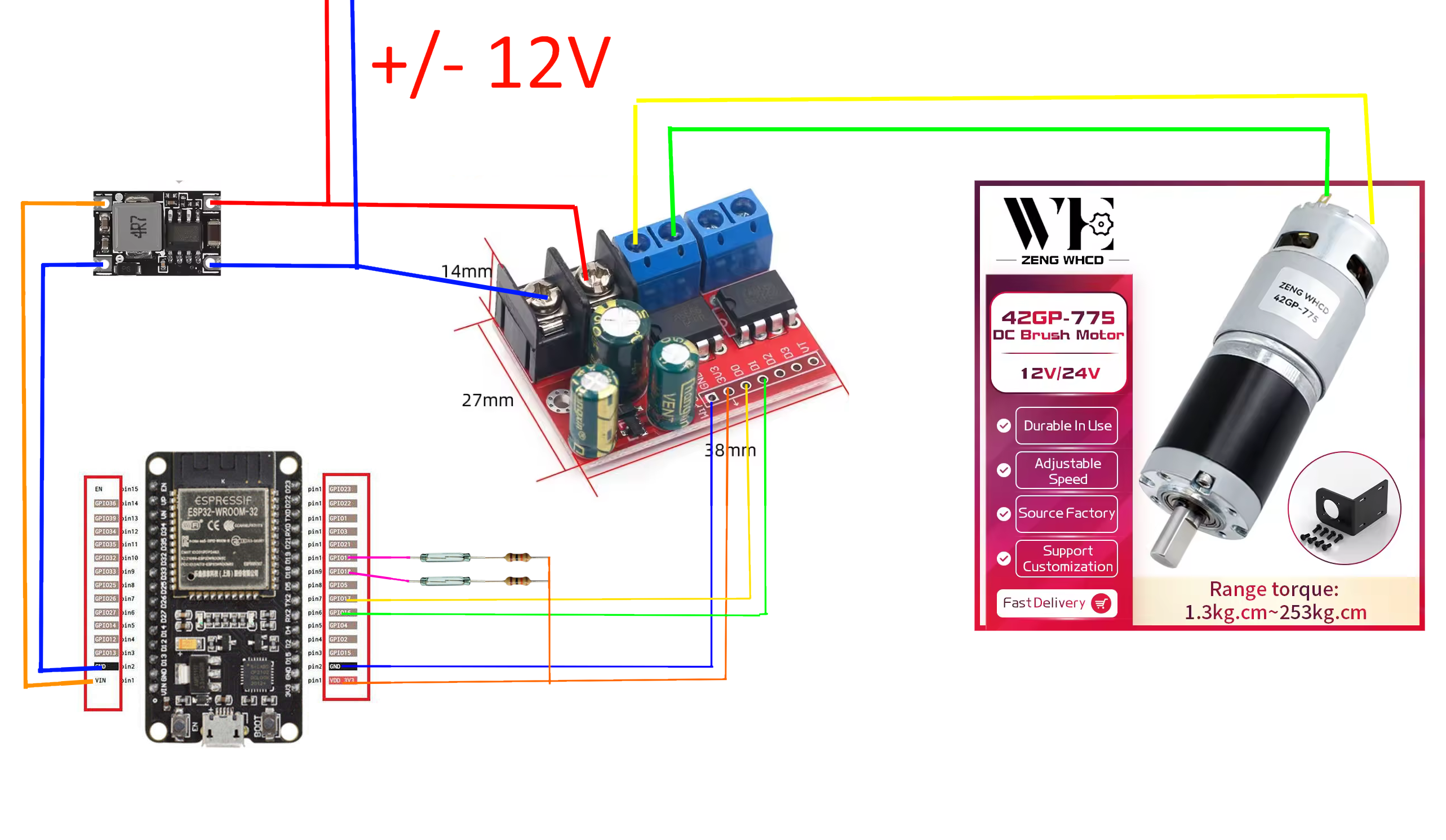
Our Heroes (Component List)- Brain: ESP32 — our tiny but proud controller, fluent in Wi‑Fi and a million other protocols.
- Muscles: 12 V planetary gearbox motor — a Chinese powerhouse rated for 200 kg. You can’t stop it by hand (we tried!).
- Trainer: 5 A H‑bridge motor driver — our personal coach, telling the motor whether to spin "forward" or "backward."
- Power Core: 12 V power supply — nothing fancy, just reliable.
- Energy Regulator: 3.3 V DC‑DC converter — keeps the ESP32 well-fed but never overstuffed.
- Barrier’s Eyes: A pair of magnets and reed switches — our end‑stop sensors. They beat push‑buttons in simplicity and tidiness; plus, you can reposition the magnets for a perfect fit.
- Main Character: The barrier itself — a little battle‑worn, but freshly painted and ready for action.
- Lifeline: 220 V cable — because where else would our barrier live?
- Power: We ran a 220 V line from a nearby streetlight (a bit of electrical wizardry!), connected the 12 V supply, and tucked everything inside the barrier post.
- Motor Installation: Instead of fancy brackets, we welded the motor housing directly inside the post. The motor shaft links to the barrier’s pivot, and the gearbox trades speed for torque—slow but relentless.
- End Stops: Reed switches and magnets serve as our barrier’s eyes. When the barrier fully opens or closes, the magnet triggers the switch, and the ESP32 cuts power to the motor. A few tweaks and the magnets stayed put perfectly.
Brain & Software: The ESP32 orchestrates it all. We wrote a simple Arduino sketch.
Initially, you connect via Wi‑Fi, open a browser, hit "Open Gate, " and watch it swing.
As our "barrier club" grew, we added a tunnel to the outside world—now you can control it remotely. A neighbor’s Wi‑Fi hotspot even saved us from buying a GSM module
In Conclusion: A Tale of Savings and Clean Shoes!We didn’t just build a barrier—we carved out comfort and banished muddy footprints forever. And it cost almost nothing! The system turned out to be robust, user‑friendly, and—most importantly—reliable. We started with smartphone control and ended with full remote access. Progress, indeed!
Don't pay attention to the list of components, everything was bought on Aliexpress
What’s Next? (When You Just Can’t Sit Still)- Eagle Eye (Camera): Imagine seeing who’s at your gate in real time. A camera mount would let you monitor visitors—and give any would‑be thieves a second thought.
- Fail‑Safe Timer: What if a reed switch fails? Our motor could spin endlessly. Add a runtime limiter—say, 10 seconds max—and stop on timeout. Safety first, even for a humble barrier.
- Automatic Reclosure: Who hasn’t driven off and forgotten to close the gate? Add a timed auto‑close with photo‑eyes to avoid pinches. Open, go, and—after a preset delay—the gate swings shut all on its own.
Bahrik
 Дмитрий Батьковичь
Дмитрий Батьковичь




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments