


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
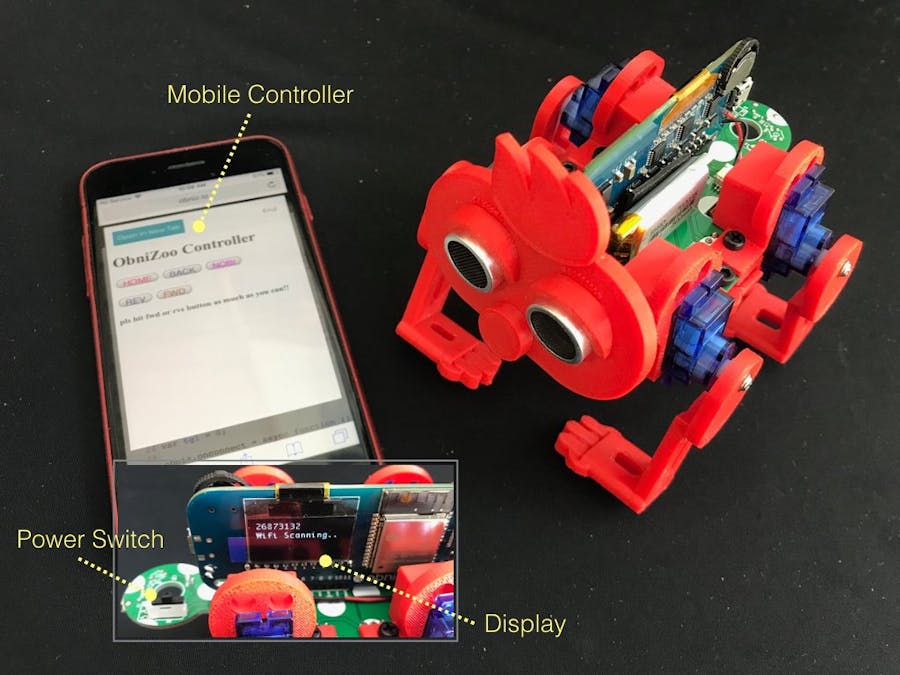
Controller uses Obniz. Connected to the cloud via WiFi. Control code is executed on obniz.io.
Power is supplied from 500mA/h LiPo Battery. Battery Charger MCP73831 is located on Body PCB. You can charge battery connecting micro usb connector on tail.
IO Pin assignment: 0:IR receiver, 1:RGB LED, 2: LED, 3:Photo transistor, 4:Power for sensors, 5:Servo RL, 6:Servo RR, 7:Servo FL, 8:Servo FR, 9:Buzz, 10:Sonar Trig, 11: Sonar Echo
Each parts are 3D-printed. Please refer to the Thingiverse for more information.

20 projects • 34 followers
Chief Prototypist. 20+ years R&D experience in wide range of technology.



Comments