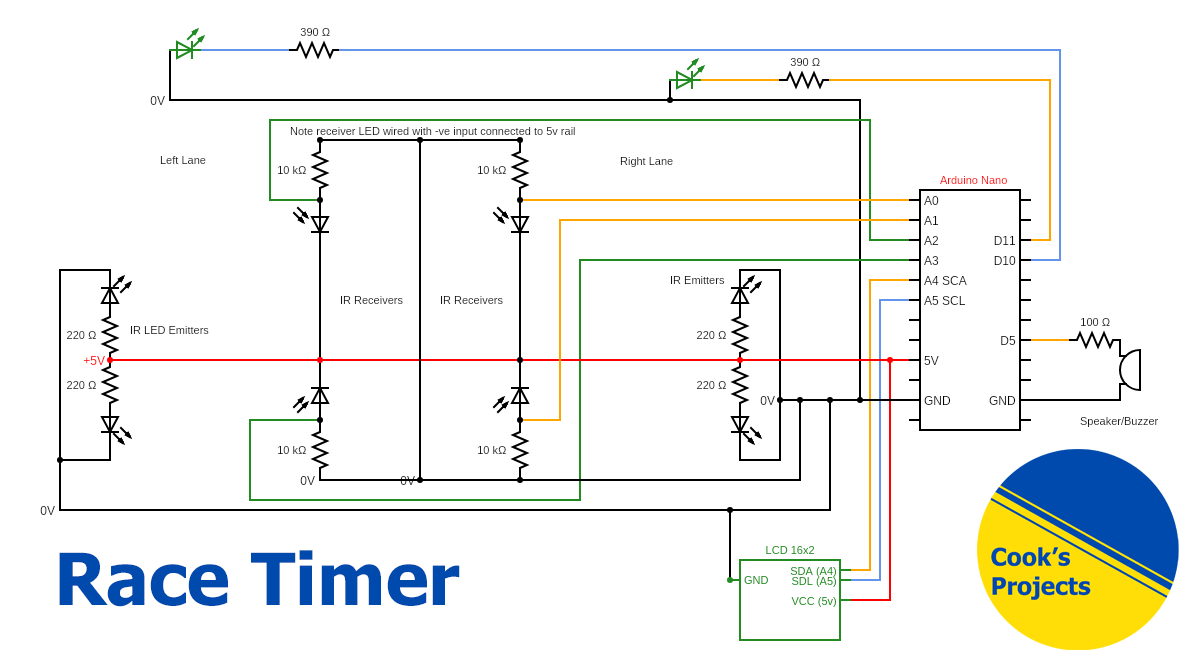
// Hot Wheels Race Timer
// v2.0
// by Ian Cook
// Check our YouTube channel at Cooks Projects
// https://www.youtube.com/channel/UC5M_udtMhAwnymLyAY5qAkw
// Released Feb 2021 under licence
// Please acknowledge me if you use any of my code
// A further refined program that allows dual function of constant speed measurement as well as the race timer is available for additional fee.
// See website links or https://www.emmaalexandercook.com/cooks-projects/p/race-timer for details.
#include <I2CIO.h>
#include <FastIO.h>
#include <Wire.h>
#include <LCD.h>
#include <LiquidCrystal.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // double check your LCD address first using: i2C_scanner
//NANO uses SDA on A4 and SCL on A5
#define DEBUG false //Use to toggle the debug function on/off
#define DEBUG_SENSORS false //Use to toggle the sensor debug function
#define COMP_OUTPUT true //Use this to send info to a connected computer via serial interface. Use false if time is critical in detecting cars simultaneously
#define SPEED_CRITICAL false //Set to TRUE to improve detection speeds of the SpeedClock() function so that simultaneous detection of cars >20Km/h is always possible.
const int L_LANE_LED=10; //Lane 2 winning LED in D10 PIN
const int R_LANE_LED=11; //lane 1 winning LED on D11 PIN
const unsigned int MaxWaitTime=10000; //This is the maximum time to wait for second car to finish before recording result (millisecs)
const int buzzer=5; //Digital PIN buzzer is attached to - has to allow PWM (pin 3,5,6 or 9)
const int LEFT=1, RIGHT=2, BOTH=11;
const int RFDataIn = A1, RRDataIn = A3, LFDataIn = A0, LRDataIn = A2; //Define the Anologue pins set up to which sensor. Reading Pin A3 causes Tone() to terminate early
//Beware NANO uses the LCD serial transmit (SDA,SCL) on pins A4 and A5
const int IRLEDThreshold = 800; //Set to a value that indicates when the IR receiver is blocked. IR sensor returns 1024 at maximum brightness. Adjust for your configuration
const int DISTANCE_BETWEEN_SENSORS = 8; //set this to the distance (cm) between the front and rear IR sensor
const int L_LANE = 1, R_LANE = 2;
const int HIGH_TONE = 2400, LOW_TONE = 800;
const float SENSOR_DISTANCE_FACTOR = float(288); // to speed up program, manually calculate this factor and place here. =float(DISTANCE_BETWEEN_SENSORS/100000)/float(0.27777778);
// SENSOR_DISTANCE_FACTOR is 288 if the DISTANCE_BETWEEN_SENSORS is 8cm
int FrontSensor[2], RearSensor[2]; //For recording the sensor information and allowing all subroutines to be able to read them.
// Although array[0] should be available, my analysis shows that using array[0] is unreliable when using global variables.
void setup() {
Serial.begin(9600);
pinMode(RFDataIn, INPUT);
pinMode(RRDataIn, INPUT);
pinMode(LFDataIn, INPUT);
pinMode(LRDataIn, INPUT);
pinMode(R_LANE_LED, OUTPUT); //lane 1
pinMode(L_LANE_LED, OUTPUT); //lane 2
pinMode(buzzer, OUTPUT); // Set buzzer - as an output
digitalWrite(R_LANE_LED, HIGH);
digitalWrite(L_LANE_LED, HIGH);
lcd.begin(16, 2);
lcd.setCursor(3, 0);
lcd.print("Race Timer");
lcd.setCursor(3, 1);
lcd.print("by:Ian Cook");
delay(2000);
lcd.clear();
}
void loop() {
int Winner;
bool R_LANEFinish, L_LANEFinish, R_LANESpeedTrap, L_LANESpeedTrap, Sound;
float LSpeed, LScaleSpeed=0, RSpeed, RScaleSpeed=0, WinningDiff, RaceTime;
unsigned long StartTime, WaitTime, SampleTime, timediff;
unsigned long FrontSensorTime[2], RearSensorTime[2]; //Using array[0] results in a bug with global variables in the compilier, so I haven't used array[0]
// Race reset - so reset variable values
FrontSensorTime[L_LANE]= 0;
FrontSensorTime[R_LANE]= 0;
RearSensorTime[L_LANE] = 0;
RearSensorTime[R_LANE] = 0;
Winner = 99;
LSpeed = 0;
RSpeed = 0;
WinningDiff = 999.999;
RaceTime = 0;
timediff =9999;
R_LANEFinish = false;
L_LANEFinish = false;
R_LANESpeedTrap = false;
L_LANESpeedTrap = false;
//Flash lights,sound buzzer and declare we are ready to race
lcd.clear();
lcd.setCursor(3, 0);
lcd.print("Race Timer ");
delay(2000);
lcd.setCursor(0, 1);
lcd.print("Ready to race...");
digitalWrite(R_LANE_LED, LOW);
digitalWrite(L_LANE_LED, LOW);
tone(buzzer, LOW_TONE, 600);
delay(900);
tone(buzzer, LOW_TONE,600);
digitalWrite(L_LANE_LED, HIGH);
delay(900);
tone(buzzer, LOW_TONE,600);
digitalWrite(R_LANE_LED,HIGH);
delay(900);
tone(buzzer, HIGH_TONE,800);
digitalWrite(R_LANE_LED, LOW);
digitalWrite(L_LANE_LED, LOW);
Sound = true; //flag to allow tone to sound as workaround for Arduino bug that stops tone when pin A3 is read!
lcd.clear();
lcd.setCursor(4,0);
lcd.print("GO GO GO!");
StartTime = millis(); //set the start time of the race which begins when lights go out
WaitTime = StartTime; //Set this so that we don't wait for ever for a finishing car that has crashed
// Loop to wait until the first car crosses - the do Loop takes 1-2 ms which means speeds over 144 Km/h will sometimes not be read. 288km/h is the max theoretical speed detectable on Arduino Nano
do {
//Read the sensor data and record the time
SampleTime = SampleSensors(Sound);
if (Sound && SampleTime>(StartTime+800)) Sound = false; //Workaround for Tone bug that stops tone when pin A3 read!
//Set DEBUG flag for your setup to make sure the constant IRLEDThreshold value is accurate for your hardware
//If DEBUG is left true then these serial prints will slow the sample rate considerably and reduce the max detectable speed to approx 7Km/h
#if (DEBUG)
TestSensors(false); //Debug routine to display the sensor recorded state
#endif
if (!L_LANEFinish && (FrontSensor[L_LANE] < IRLEDThreshold)) {
// Left Lane has finished
FrontSensorTime[L_LANE] = SampleTime;
if (!R_LANEFinish) {
//As the other lane hasn't finished yet, this lane is the winner
Winner = L_LANE;
digitalWrite(L_LANE_LED, HIGH);
}
L_LANEFinish = true;
WaitTime = millis(); //Reset the timer to ensure we don't wait if the other lane has crashed
}
if (!R_LANEFinish && (FrontSensor[R_LANE] < IRLEDThreshold)) {
// Right Lane has finished
FrontSensorTime[R_LANE] = SampleTime;
if (!L_LANEFinish) {
//As the other lane hasn't finished yet, this lane is the winner
Winner = R_LANE;
digitalWrite(R_LANE_LED, HIGH);
}
R_LANEFinish = true;
WaitTime = millis(); //Reset the timer to ensure we don't wait if the other lane has crashed
}
if (L_LANEFinish && !L_LANESpeedTrap && RearSensor[L_LANE] < IRLEDThreshold) {
//The car has crossed the line and now the rear sensor
RearSensorTime[L_LANE] = SampleTime;
L_LANESpeedTrap = true;
}
if (R_LANEFinish && !R_LANESpeedTrap && RearSensor[R_LANE] < IRLEDThreshold) {
//The car has crossed the line and now the rear sensor
RearSensorTime[R_LANE] = SampleTime;
R_LANESpeedTrap = true;
}
// Exit the loop once all sensors have been triggered or once one lane has finished and there has been a delay > MaxWaitTime
} while (!((L_LANEFinish && R_LANEFinish && L_LANESpeedTrap && R_LANESpeedTrap) || ((L_LANEFinish || R_LANEFinish) && (millis() - WaitTime > MaxWaitTime)) ) );
tone(buzzer, HIGH_TONE,150);
delay(200);
tone(buzzer, HIGH_TONE,150);
// Send information to a connected computer which can be used in data analysis
#if (COMP_OUTPUT)
Serial.println("Times:\tLEFT Front,\tRear,\tRIGHT Front,\tRear");
Serial.print("\t");
Serial.print(FrontSensorTime[L_LANE]);
Serial.print("\t");
Serial.print(RearSensorTime[L_LANE]);
Serial.print("\t\t");
Serial.print(FrontSensorTime[R_LANE]);
Serial.print("\t");
Serial.println(RearSensorTime[R_LANE]);
#endif
//Race is over. Calculate and display times
//Race Time is time for first car to finish
switch (Winner) {
case R_LANE:
RaceTime = float (FrontSensorTime[R_LANE]-StartTime)/1000; //Recorded in Sec
if (FrontSensorTime[L_LANE]>0) WinningDiff = float(FrontSensorTime[L_LANE] - FrontSensorTime[R_LANE])/1000;
break;
case L_LANE:
RaceTime = float (FrontSensorTime[L_LANE]-StartTime)/1000;
if (FrontSensorTime[R_LANE]>0) WinningDiff = float(FrontSensorTime[R_LANE] - FrontSensorTime[L_LANE])/1000;
break;
default:
RaceTime = 0;
}
//Check for a draw due to sample timings being equal
if (WinningDiff == 0) Winner=555;
//The distance between the sensors is DistanceBetweenSensors (cm) so the speed is D cm/time taken (cm/ms *3 600 000 / 100 000 = km/h) :: Millis() returns milliseconds which 1/1000 s
// Km/h = (D/100000)/(milli/(1000*60*60)) = D/(milli/3600) or D/3600 * 1/milli; D=8 then km/h = 288 / milli
//Max speed capable of reading at 2ms sample rate is 144 Km/h!
// Speed = Dist in KM (cm /100000) / time in hrs ( millis/1000/60/60)
// distance = 8 cm then Speed = (8/100000)/(millis/.27777778) = (0.00008/0.27777778)/millis = 288/millis
timediff = RearSensorTime[L_LANE] - FrontSensorTime[L_LANE];
if (timediff>0) {
LSpeed = SENSOR_DISTANCE_FACTOR / float(timediff); //km/h
#if (DEBUG)
//Use to check that the SENSOR_DISTANCE_FACTOR is correct for your set up
Serial.print ("Time Diff:\t");
Serial.print (timediff);
Serial.print (" Lspeed calc ");
Serial.println (LSpeed);
#endif
}
else LSpeed = 0;
timediff = RearSensorTime[R_LANE] - FrontSensorTime[R_LANE];
if (timediff>0) {
RSpeed = SENSOR_DISTANCE_FACTOR / float(timediff); //km/h
#if (DEBUG)
//Use to check that the SENSOR_DISTANCE_FACTOR is correct for your set up
Serial.print ("Time Diff:\t");
Serial.print (timediff);
Serial.print (" Rspeed calc ");
Serial.println (RSpeed);
#endif
}
else RSpeed = 0;
//Hot wheels cars are 1:64 scale so calculate scale speed
LScaleSpeed=LSpeed*float(64);
RScaleSpeed=RSpeed*float(64);
//Send information to serial device (computer) for data analysis
#if (COMP_OUTPUT)
Serial.print("Race Time: ");
Serial.println(RaceTime);
Serial.println("Final Speeds");
Serial.print("LEFT: ");
Serial.print(LSpeed,3);
Serial.print(" Km/h : Scale Spd= ");
Serial.print(LScaleSpeed,2);
Serial.println(" Km/h");
Serial.print("RIGHT: ");
Serial.print(RSpeed,3);
Serial.print(" Km/h : Scale Spd= ");
Serial.print(RScaleSpeed,2);
Serial.println(" Km/h");
Serial.print("Left Lane Race Time (ms)");
Serial.println("\tRight Lane Race Time (ms)");
Serial.print(FrontSensorTime[L_LANE]);
Serial.print("\t\t\t");
Serial.println(FrontSensorTime[R_LANE]);
if (Winner== 555) Serial.print("This was a DRAW! ");
else if (Winner == R_LANE) Serial.print("Right car won by ");
else Serial.print("Left car won by ");
Serial.print(WinningDiff,3);
Serial.println(" s");
#endif
//Send the information to the LCD display on the hardware unit
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Race Time:");
lcd.setCursor(10,0);
lcd.print(RaceTime,3);
lcd.setCursor(14,0);
lcd.print("s ");
lcd.setCursor(0,1);
if (Winner == L_LANE) {
lcd.print("L won by");
}
else if (Winner == R_LANE) {
lcd.print("R won by");
}
else {
lcd.print("DRAW!");
}
lcd.setCursor(10,1);
lcd.print(WinningDiff,3);
lcd.setCursor(15,1);
lcd.print("s");
delay(5000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("LSpd:");
lcd.setCursor(5, 0);
if (LSpeed > 0.001) {
lcd.print(LSpeed, 2);
lcd.setCursor(11, 0);
lcd.print(" Km/h");
}
else lcd.print(" * DNF *"); //This lane did not finish
lcd.setCursor(0, 1);
lcd.print("RSpd:" );
lcd.setCursor(5, 1);
if (RSpeed > 0.001) {
lcd.print(RSpeed, 2);
lcd.setCursor(11, 1);
lcd.print(" Km/h");
}
else lcd.print(" * DNF *"); //This lane did not finish
if (Winner != 555) {
//i.e. This is NOT a draw
//set cursor for Winnner text
delay(1000);
lcd.setCursor(11, (Winner-L_LANE));
lcd.print("*WIN*");
for (int i=0; i<6; i++) {
digitalWrite(Winner+9, LOW);
delay(400);
digitalWrite(Winner+9, HIGH);
delay(400);
}
}
else {
//This must be a draw
lcd.setCursor(12,0);
lcd.print ("DRAW");
lcd.setCursor(12,1);
lcd.print ("DRAW");
for (int i=0; i<6; i++) {
digitalWrite(L_LANE, LOW);
digitalWrite(R_LANE, LOW);
delay(400);
digitalWrite(R_LANE, HIGH);
digitalWrite(L_LANE, HIGH);
delay(400);
}
}
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("LScaleSpd:");
if (LScaleSpeed<10) lcd.setCursor(12,0);
else {
if (LScaleSpeed<100) lcd.setCursor(11, 0); //line up the decimal points on the display
else lcd.setCursor(10,0);
}
if (LScaleSpeed >0) lcd.print(LScaleSpeed, 1);
else lcd.print("DNF");
lcd.setCursor(0, 1);
lcd.print("RScaleSpd:");
if (RScaleSpeed<10) lcd.setCursor(12,1);
else {
if (RScaleSpeed<100) lcd.setCursor(11, 1); //line up the decimal points on the display
else lcd.setCursor(10,0);
}
if (RScaleSpeed >0) lcd.print(RScaleSpeed, 1);
else lcd.print("DNF");
// Delay before staring the race again.
delay(5000);
}
unsigned long SampleSensors(bool sound) {
//Read the sensor data and return the time they are taken (ms)
//The parameter sound is used to prevent the tone being terminated early due to Arduino Nano issue that reading A3 pin causes the tone to stop!
FrontSensor[R_LANE] = analogRead(RFDataIn);
FrontSensor[L_LANE] = analogRead(LFDataIn);
//This section only compiles the relevant code if RRDataIn is connected to pin A3, defined in constants. This is to prevent cutting tone short during start sequence
#if RRDataIn == A3
if (!sound) RearSensor[R_LANE] = analogRead(RRDataIn);
#else
RearSensor[R_LANE] = analogRead(RRDataIn);
#endif
RearSensor[L_LANE] = analogRead(LRDataIn);
return(millis());
}

















{kind=link}
Comments