


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
| ||||||
| ||||||
 |
| |||||
Description: This is a simple gesture based Covid'19 Mask that can be controlled by hand gestures. Whenever the "UP" gesture is made the mask covers the face and when "DOWN" gesture is made the mask goes down and face gets uncovered.
Object Oriented ProgrammingThe device is programmed using Object Oriented Programming (OOP). You can use usual structural programming but OOP is preferred because its fast, flexible and easier to modify, maintain and debug. Also in OOP any attribute can be added by just inheriting the class created by the previous developer. You can learn Object Oriented C++ here.Hardware Description
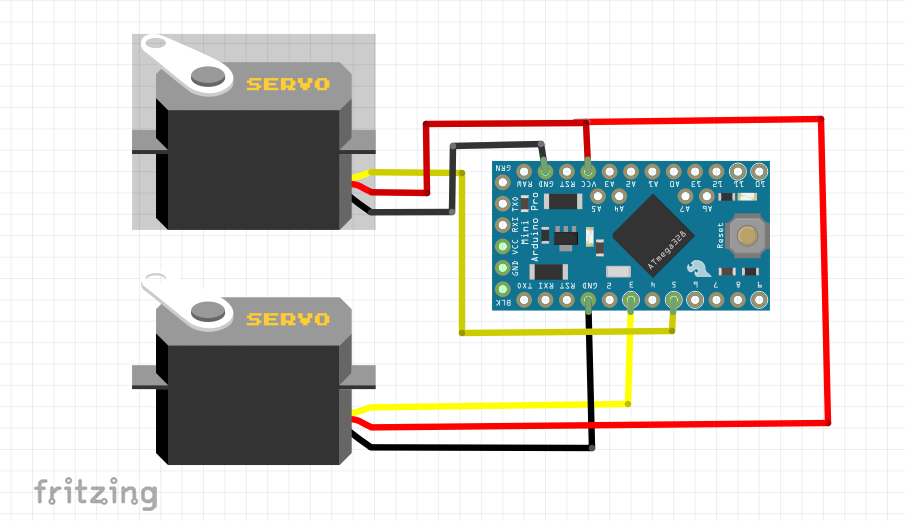
1. Arduino Pro Mini : This will be the microcontroller which will be used in this project. This will act as the brain of the device and will be used to rotate servo motors on the device. Complete guide to learn about this microcontroller can be found here and here. Electronic schematics/specs can be found here.
2. MG-90 Servo Motors: These will be used as actuators for this device. For the mask to go up these motors will rotate at an angle of 90 degrees and for the mask to go down these motors will rotate at an angle of 0 degrees. To know about how these motors work and their electronic specs refer this section. The datasheet for this kind of servo motor can be found here.
3. Ice-Cream Sticks: These will be used as the chassis for the device. Using this is optional as you can anything of your choice to make chassis for this device. But make sure that anything that you use is extremely light weight as the user has to wear this mask on his/her face.
4. GY-7620 Gesture Sensor: As the name suggest this sensor will be used to detect the hand gestures of the user. The complete tutorial on how to use this sensor as well its electronic configuration can be found here.
5. Dummy Frame: Dummy frame is nothing but a component which looks like googles or spectacles and which can be worn like spectacles.This will be the component on which the ice cream sticks will be attached onto. Now again this is optional. You can use any other component if you want in place of this frame but make sure it is quite sturdy and wearable like a dummy frame.
6. Velcro Strap: Circuit will be attached on this strap for the user's flexibility. By attaching this user can roam freely with the mask attached to his/her body.Software Description
Arduino IDE: Arduino IDE is the only software used in this project. This IDE is used for uploading the program/code into the Arduino. The IDE compiles the C++ program and converts it into machine code which is then executed by the microcontroller. To know more about this IDE refer this source.
Note: You can use additonal softwares for this project by adding more attributes to the existing program. The softwares can be MIT app inventor, bluetooth app and many more. More information on these softwares is out of scope of this tutorial.
DIY Step by Step (More Images to be added soon......)Step 1: Gather 9-10 Ice Cream Sticks. If you are not using a dummy frame then gather around 20 Ice-Cream Sticks.
Step 2: Make 2 pairs of H -Shape using 8 Ice-Cream sticks ( 4 sticks per pair) and then stick them two ends of the dummy frame using glue gun. Make sure that the sticks are glued perfectly.
Step 3: Attach the servo motors on both sides.(1 motor per side) Fit the motors at the bottom of the 2 vertical sticks. Fix the motors with glue gun.
Step 4: To fix the upper parallel stick to the dummy frame use glue gun or you can also use cable ties to fix them temporarily.
Step 5: Get a mask from stationary store or if you already have it well and good. Make two holes in the mask both the holes in middle vertically and 5 cm away horizontally.
Step 6: Take two more sticks and fix one end of those sticks into the two holes made earlier in step 5. Stick both their ends with glue gun.
Step 7: Fix the two other ends of those sticks to the servo motors. Use glue gun to fix those sticks on servo motors.
Step 8: Attach the Circuit made to a velcro strap and fix it to the upper chest by tightening it.
Future Implementation IdeasInnovation doesn't stop here. There are tons of ideas to explore which can help in tackling covid'19 easily. Some of these ideas are given below:
1. Attaching Thermal Camera: A thermal camera can detect temperature in nearby surroundings. So attaching this kind of thermal camera to the mask can extends its capabilities by detecting any person who has temperature around the user. This will help the user to keep distance from these people. You can find more about the thermal cameras here.
2. Cough Sound Recognition: Sensor or any kind of machine learning algorithm can be integrated which can detect the sound of cough. This feature can be proved very valuable as this might prevent the user to get in contact with such people.
Demonstration Video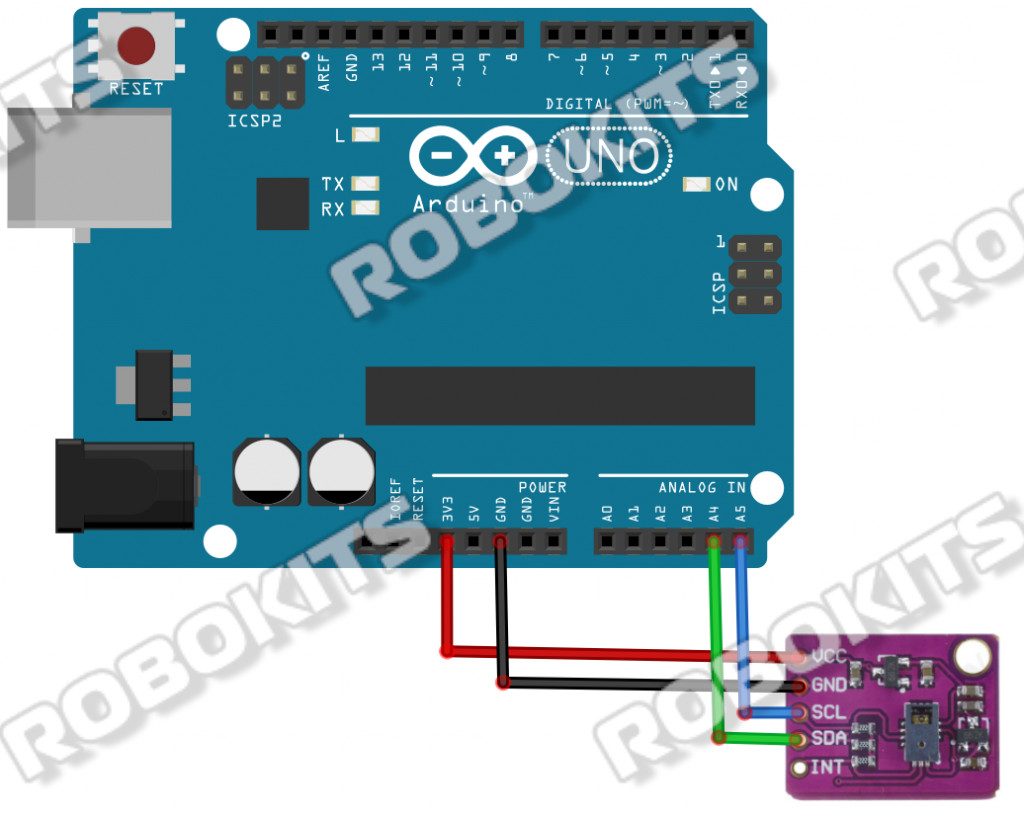




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments