


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
EEEP Pedro de Queiroz Lima, Beberibe - CE
Palavras Chave: Deficiente Visual; Angulação; Dispositivo Auxiliar
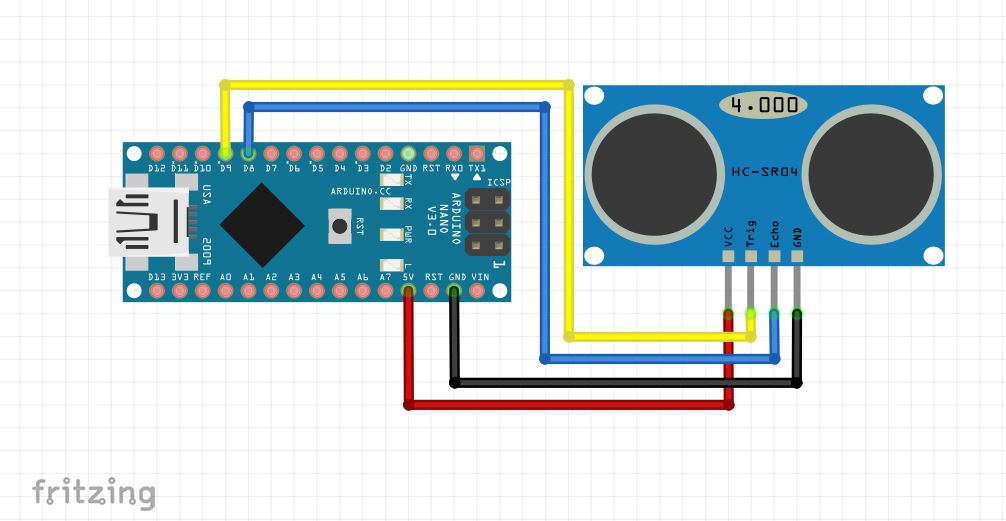
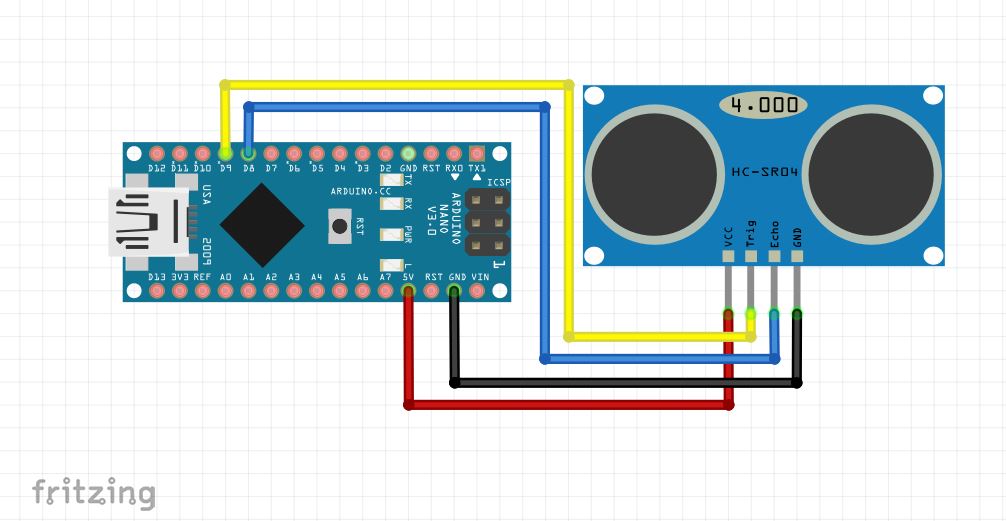
I. INTRODUÇÃO: Atualmente atecnologia tem cada vez mais servido como ferramenta para facilitar a locomoçãohumana. Dentre os diversos campos estudados, a locomoção de pessoas comdeficiências visual tem sofrido inúmeros avanços tecnológicos, como bengalassônicas, robôs guias dentre outros. Apesar disso, alternativas baratas eacessíveis ainda se fazem necessárias para diminuir o impacto causado pelosproblemas visuais. Neste contexto dispositivos de detecção de obstáculos como oAnnuitiwalk e Vibeye, ganharam a atenção do público com propostas semelhantesde fornecer ao seu usuário dispositivos baratos que consigam identificarobstáculos por meio de ondas ultrassônicas não audíveis aos seres humanos. Ambosfuncionam de forma semelhante com dispositivos acoplados a cima da cintura econectados a uma pulseira vibratória que indica quando um objeto é detectadopor meio de vibrações. Vale ressaltar no entanto que até o momento nenhumdestes projetos conta com um sistema de segurança contra a possibilidade deinclinação de seu usuário, isto é, quando o individuo esta com a cabeça muitopara baixo ou para cima, ou mesmo para esquerda ou direita. Neste trabalhopropomos o Auxílío Para Deficientes Visuais(APDV), que de forma semelhantes aostrabalhos anteriores dispõem-se a utilizar um sensor ultrassônico, capaz dedetectar obstáculos imediatamente a frente de seu usuário, e alertando por meiode uma pulseira vibratória. O APDV ainda conta com um sistema capaz ajustar adetecção levando em conta o ângulo emque o dispositivo está em relação ao solo e ao seu usuário.
II.OBJETIVO E QUESTÃOPROBLEMA: Conforme dados do IBGE de 2015, cerca de 3, 6% da população brasileirasofre com algum tipo de deficiência visual (VEILLELA, 2015). Dentre estes, cerca de 16% tem problemas para realizar tarefas do cotidiano como ir aotrabalho, escola e etc. Uma vez que locomover-se em ambientes com obstáculoscomo, por exemplo ruas, terminais de ônibus e praças, é uma das principaisdificuldades para a população com deficiência visual, formas de minimizar esseproblema são necessárias. Em 2014 o grupo de pesquisa pernambucanodesenvolveu o protótipo de óculos inteligente Annuitwalk, que consistia em umsensor ultrassônico acoplado em uns óculos, capaz de detectar obstáculos a cimada altura da cintura (ANNUITWALK, 2014). Tal proposta foi feita, visando paratrabalhar em conjunto com a bengala, em que o usuário teria conhecimento depossíveis obstáculos a baixo da cintura, porém não teria conhecimento algumsobre obstáculos acima da cintura como postes, e cabines telefônicas, verFigura 1 Dessa forma, caso um obstáculofosse detectado o Annuitwalk avisaria o usuário, que poderia desviar do mesmo.De forma semelhante um grupo de pesquisadores desenvolveu o VibEye, como umdispositivo que pode ser anexado em qualquer vestimenta acima da cintura, também com o intuito de detectar obstáculos (VIBEYE, 2017).
FIGURA 1 – altura acima e abaixo da cintura
Fonte: ADAPTADO DEANNUITWALK, 2014
Apesar de ser um grandeavanço tecnológico no aspecto de acessibilidade, muitos problemas ainda nãoforam solucionados. Deve-se levar em conta que a melhor distância da detecçãode um obstáculo qualquer é variável, dependendo da localização e angulação dosensor, bem como da estatura de seu usuário. Vamos supor, por exemplo, que um usuário qualquer inclinasse o dispositivo de detecção emquestão para baixo ou para cima, certamente a distância de medição não sairiada forma mais eficaz, uma vez que ambos os projetos Annuitwalk e VibEye, foramconstruídos de forma que seussensores estejam retos em relação ao solo. Neste trabalho propomos o uso deóculos dotados de um dispositivo capaz de detectar objetos acima da altura dacintura, por meio de pulsos sonoros que leva em conta a disposição e inclinaçãodo mesmo em relação ao seu usuário, fornecendo assim uma melhor experiência aosseus usuários e solucionando o problema da angulação dos dispositivos.
Referências
ANNUITWALK, Sobre o AnnuitWalk, 2017. Disponível em: <http:// http://annuitwalk.com/ />.Acesso em: 05 nov. 2017.
MENDONÇA, Alberto, etal. "Alunos cegos e com baixa visão–Orientações curriculares." Lisboa:Ministério da Educação/Direcção Geral de Inovação e Desenvolvimento Curricular (2008).
VIBEYE. Sobre o VibEye, 2017.Disponível em: <http://www.vibeye.com.br/>. Acesso em: 05 nov. 2017.
VILLELA, F. IBGE: 6, 2% dapopulação têm algum tipo de deficiência. Agência Brasil, 2015.
Apoio: PIXELS ESCOLA; FAMIL, EEEPPEDRO DE QUEIROZ LIMA/SEDUC-CE,
GLEISSONGERMANO, WESLLEY CALDAS, SANDRO MESQUITA





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments