


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
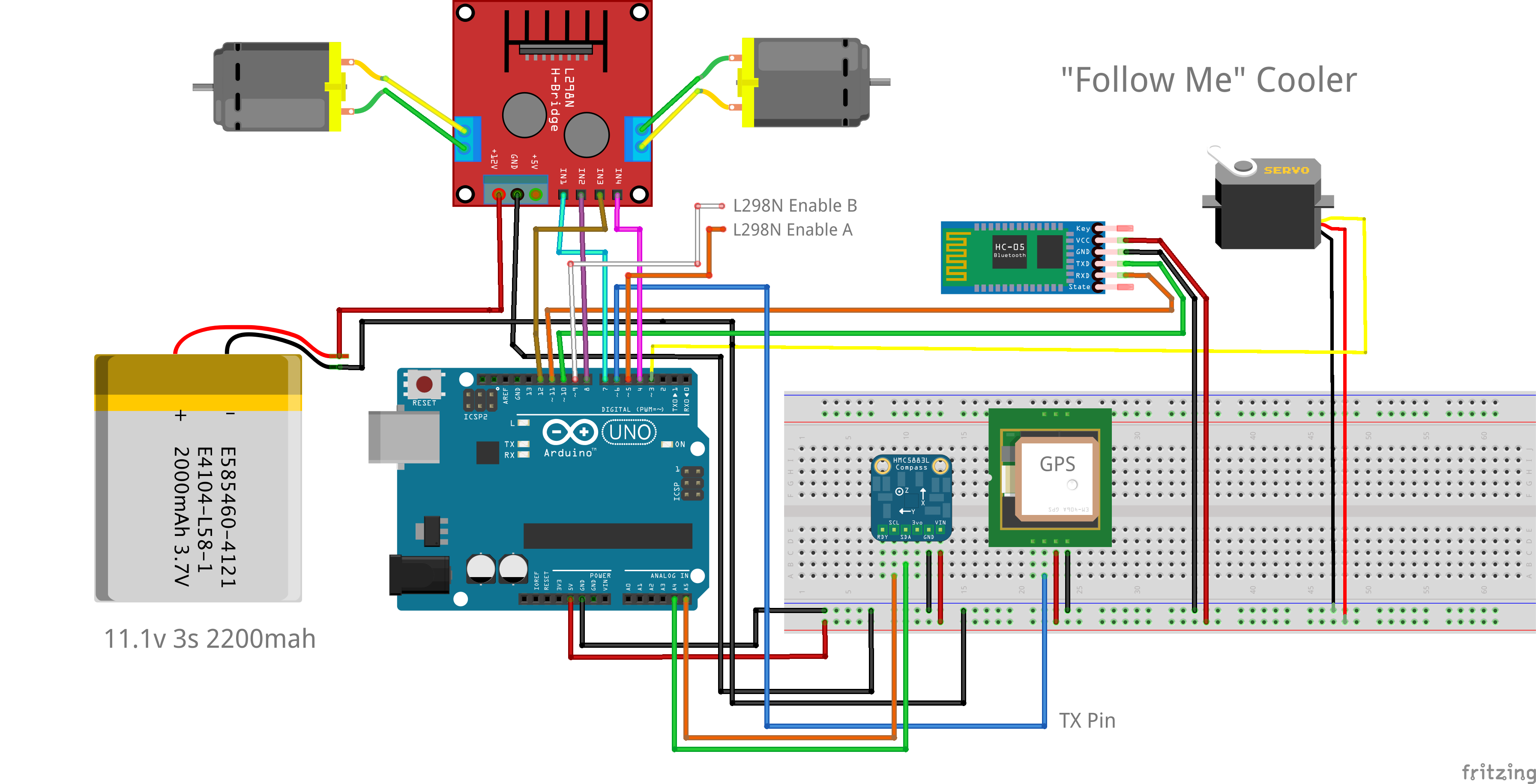
I made this robot in order to carry heavy loads from one location to another. Basically, I want to make a cheap DIY version of high-tech GPS-based robots which are used in industries.
Thanks UTSOURCE.net to offer electronic components for this project!
you can check UTSOURCE.net, they deal in all kinds of electronic components, for example, Arduino board, DC motor driver, and many more.
I've made many changes in its body (you can clearly see that in videos and images).
It works and I have even uploaded a test video on YouTube.
It's incomplete at this point
#define BLYNK_USE_DIRECT_CONNECT
// Imports
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_HMC5883_U.h>
#include <Servo.h>
#include <SoftwareSerial.h>
#include <BlynkSimpleSerialBLE.h>
#include "./TinyGPS.h" // Use local version of this library
#include "./CoolerDefinitions.h"
// GPS
TinyGPS gps;
// Lid
Servo lidServo;
CoolerLid lidState = CLOSED;
// Master Enable
bool enabled = false;
//WidgetTerminal terminal(V3);
// Serial components
SoftwareSerial bluetoothSerial(BLUETOOTH_TX_PIN, BLUETOOTH_RX_PIN);
SoftwareSerial nss(GPS_TX_PIN, 255); // TXD to digital pin 6
/* Compass */
Adafruit_HMC5883_Unified mag = Adafruit_HMC5883_Unified(12345);
GeoLoc checkGPS() {
Serial.println("Reading onboard GPS: ");
bool newdata = false;
unsigned long start = millis();
while (millis() - start < GPS_UPDATE_INTERVAL) {
if (feedgps())
newdata = true;
}
if (newdata) {
return gpsdump(gps);
}
GeoLoc coolerLoc;
coolerLoc.lat = 0.0;
coolerLoc.lon = 0.0;
return coolerLoc;
}
// Get and process GPS data
GeoLoc gpsdump(TinyGPS &gps) {
float flat, flon;
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
GeoLoc coolerLoc;
coolerLoc.lat = flat;
coolerLoc.lon = flon;
Serial.print(coolerLoc.lat, 7); Serial.print(", "); Serial.println(coolerLoc.lon, 7);
return coolerLoc;
}
// Feed data as it becomes available
bool feedgps() {
while (nss.available()) {
if (gps.encode(nss.read()))
return true;
}
return false;
}
// Lid Hook
BLYNK_WRITE(V0) {
switch (lidState) {
case OPENED:
setServo(SERVO_LID_CLOSE);
lidState = CLOSED;
break;
case CLOSED:
setServo(SERVO_LID_OPEN);
lidState = OPENED;
break;
}
}
// Killswitch Hook
BLYNK_WRITE(V1) {
enabled = !enabled;
//Stop the wheels
stop();
}
// GPS Streaming Hook
BLYNK_WRITE(V2) {
GpsParam gps(param);
Serial.println("Received remote GPS: ");
// Print 7 decimal places for Lat
Serial.print(gps.getLat(), 7); Serial.print(", "); Serial.println(gps.getLon(), 7);
GeoLoc phoneLoc;
phoneLoc.lat = gps.getLat();
phoneLoc.lon = gps.getLon();
driveTo(phoneLoc, GPS_STREAM_TIMEOUT);
}
// Terminal Hook
BLYNK_WRITE(V3) {
Serial.print("Received Text: ");
Serial.println(param.asStr());
String rawInput(param.asStr());
int colonIndex;
int commaIndex;
do {
commaIndex = rawInput.indexOf(',');
colonIndex = rawInput.indexOf(':');
if (commaIndex != -1) {
String latStr = rawInput.substring(0, commaIndex);
String lonStr = rawInput.substring(commaIndex+1);
if (colonIndex != -1) {
lonStr = rawInput.substring(commaIndex+1, colonIndex);
}
float lat = latStr.toFloat();
float lon = lonStr.toFloat();
if (lat != 0 && lon != 0) {
GeoLoc waypoint;
waypoint.lat = lat;
waypoint.lon = lon;
Serial.print("Waypoint found: "); Serial.print(lat); Serial.println(lon);
driveTo(waypoint, GPS_WAYPOINT_TIMEOUT);
}
}
rawInput = rawInput.substring(colonIndex + 1);
} while (colonIndex != -1);
}
void displayCompassDetails(void)
{
sensor_t sensor;
mag.getSensor(&sensor);
Serial.println("------------------------------------");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" uT");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" uT");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" uT");
Serial.println("------------------------------------");
Serial.println("");
delay(500);
}
#ifndef DEGTORAD
#define DEGTORAD 0.0174532925199432957f
#define RADTODEG 57.295779513082320876f
#endif
float geoBearing(struct GeoLoc &a, struct GeoLoc &b) {
float y = sin(b.lon-a.lon) * cos(b.lat);
float x = cos(a.lat)*sin(b.lat) - sin(a.lat)*cos(b.lat)*cos(b.lon-a.lon);
return atan2(y, x) * RADTODEG;
}
float geoDistance(struct GeoLoc &a, struct GeoLoc &b) {
const float R = 6371000; // km
float p1 = a.lat * DEGTORAD;
float p2 = b.lat * DEGTORAD;
float dp = (b.lat-a.lat) * DEGTORAD;
float dl = (b.lon-a.lon) * DEGTORAD;
float x = sin(dp/2) * sin(dp/2) + cos(p1) * cos(p2) * sin(dl/2) * sin(dl/2);
float y = 2 * atan2(sqrt(x), sqrt(1-x));
return R * y;
}
float geoHeading() {
/* Get a new sensor event */
sensors_event_t event;
mag.getEvent(&event);
// Hold the module so that Z is pointing 'up' and you can measure the heading with x&y
// Calculate heading when the magnetometer is level, then correct for signs of axis.
float heading = atan2(event.magnetic.y, event.magnetic.x);
// Offset
heading -= DECLINATION_ANGLE;
heading -= COMPASS_OFFSET;
// Correct for when signs are reversed.
if(heading < 0)
heading += 2*PI;
// Check for wrap due to addition of declination.
if(heading > 2*PI)
heading -= 2*PI;
// Convert radians to degrees for readability.
float headingDegrees = heading * 180/M_PI;
// Map to -180 - 180
while (headingDegrees < -180) headingDegrees += 360;
while (headingDegrees > 180) headingDegrees -= 360;
return headingDegrees;
}
void setServo(int pos) {
lidServo.attach(SERVO_PIN);
lidServo.write(pos);
delay(2000);
lidServo.detach();
}
void setSpeedMotorA(int speed) {
digitalWrite(MOTOR_A_IN_1_PIN, LOW);
digitalWrite(MOTOR_A_IN_2_PIN, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(MOTOR_A_EN_PIN, speed + MOTOR_A_OFFSET);
}
void setSpeedMotorB(int speed) {
digitalWrite(MOTOR_B_IN_1_PIN, LOW);
digitalWrite(MOTOR_B_IN_2_PIN, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(MOTOR_B_EN_PIN, speed + MOTOR_B_OFFSET);
}
void setSpeed(int speed)
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
setSpeedMotorA(speed);
// turn on motor B
setSpeedMotorB(speed);
}
void stop() {
// now turn off motors
digitalWrite(MOTOR_A_IN_1_PIN, LOW);
digitalWrite(MOTOR_A_IN_2_PIN, LOW);
digitalWrite(MOTOR_B_IN_1_PIN, LOW);
digitalWrite(MOTOR_B_IN_2_PIN, LOW);
}
void drive(int distance, float turn) {
int fullSpeed = 230;
int stopSpeed = 0;
// drive to location
int s = fullSpeed;
if ( distance < 8 ) {
int wouldBeSpeed = s - stopSpeed;
wouldBeSpeed *= distance / 8.0f;
s = stopSpeed + wouldBeSpeed;
}
int autoThrottle = constrain(s, stopSpeed, fullSpeed);
autoThrottle = 230;
float t = turn;
while (t < -180) t += 360;
while (t > 180) t -= 360;
Serial.print("turn: ");
Serial.println(t);
Serial.print("original: ");
Serial.println(turn);
float t_modifier = (180.0 - abs(t)) / 180.0;
float autoSteerA = 1;
float autoSteerB = 1;
if (t < 0) {
autoSteerB = t_modifier;
} else if (t > 0){
autoSteerA = t_modifier;
}
Serial.print("steerA: "); Serial.println(autoSteerA);
Serial.print("steerB: "); Serial.println(autoSteerB);
int speedA = (int) (((float) autoThrottle) * autoSteerA);
int speedB = (int) (((float) autoThrottle) * autoSteerB);
setSpeedMotorA(speedA);
setSpeedMotorB(speedB);
}
void driveTo(struct GeoLoc &loc, int timeout) {
nss.listen();
GeoLoc coolerLoc = checkGPS();
bluetoothSerial.listen();
if (coolerLoc.lat != 0 && coolerLoc.lon != 0 && enabled) {
float d = 0;
//Start move loop here
do {
nss.listen();
coolerLoc = checkGPS();
bluetoothSerial.listen();
d = geoDistance(coolerLoc, loc);
float t = geoBearing(coolerLoc, loc) - geoHeading();
Serial.print("Distance: ");
Serial.println(geoDistance(coolerLoc, loc));
Serial.print("Bearing: ");
Serial.println(geoBearing(coolerLoc, loc));
Serial.print("heading: ");
Serial.println(geoHeading());
drive(d, t);
timeout -= 1;
} while (d > 3.0 && enabled && timeout>0);
stop();
}
}
void setupCompass() {
/* Initialise the compass */
if(!mag.begin())
{
/* There was a problem detecting the HMC5883 ... check your connections */
Serial.println("Ooops, no HMC5883 detected ... Check your wiring!");
while(1);
}
/* Display some basic information on this sensor */
displayCompassDetails();
}
void setup()
{
// Compass
setupCompass();
// Motor pins
pinMode(MOTOR_A_EN_PIN, OUTPUT);
pinMode(MOTOR_B_EN_PIN, OUTPUT);
pinMode(MOTOR_A_IN_1_PIN, OUTPUT);
pinMode(MOTOR_A_IN_2_PIN, OUTPUT);
pinMode(MOTOR_B_IN_1_PIN, OUTPUT);
pinMode(MOTOR_B_IN_2_PIN, OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH);
//Debugging via serial
Serial.begin(4800);
//GPS
nss.begin(9600);
//Bluetooth
bluetoothSerial.begin(9600);
Blynk.begin(bluetoothSerial, auth);
}
// Testing
void testDriveNorth() {
float heading = geoHeading();
int testDist = 10;
Serial.println(heading);
while(!(heading < 5 && heading > -5)) {
drive(testDist, heading);
heading = geoHeading();
Serial.println(heading);
delay(500);
}
stop();
}
void loop()
{
Blynk.run();
}

375 projects • 392 followers
I'm Arnov. I build, design, and experiment with tech—3D printing, PCB design, and retro consoles are my jam.








_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments