

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Thanks UTSOURCE.net to offer electronic components for this project!
you can check UTSOURCE.net, they deal in all kinds of electronic components, for example, Arduino board, Motor driver, proximity sensors, and many more.
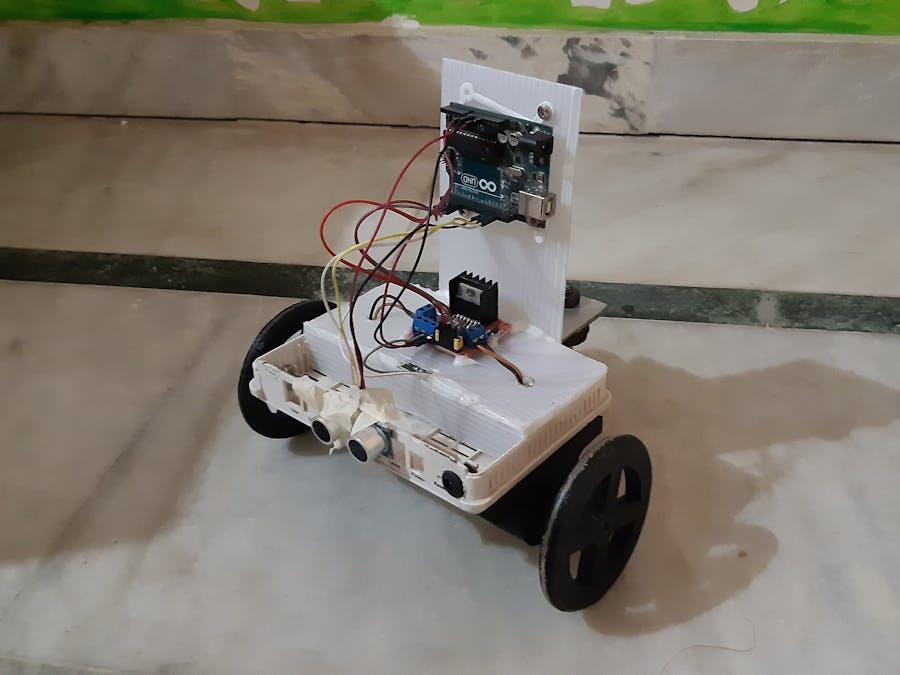
Watch the video! part 1 and part 2
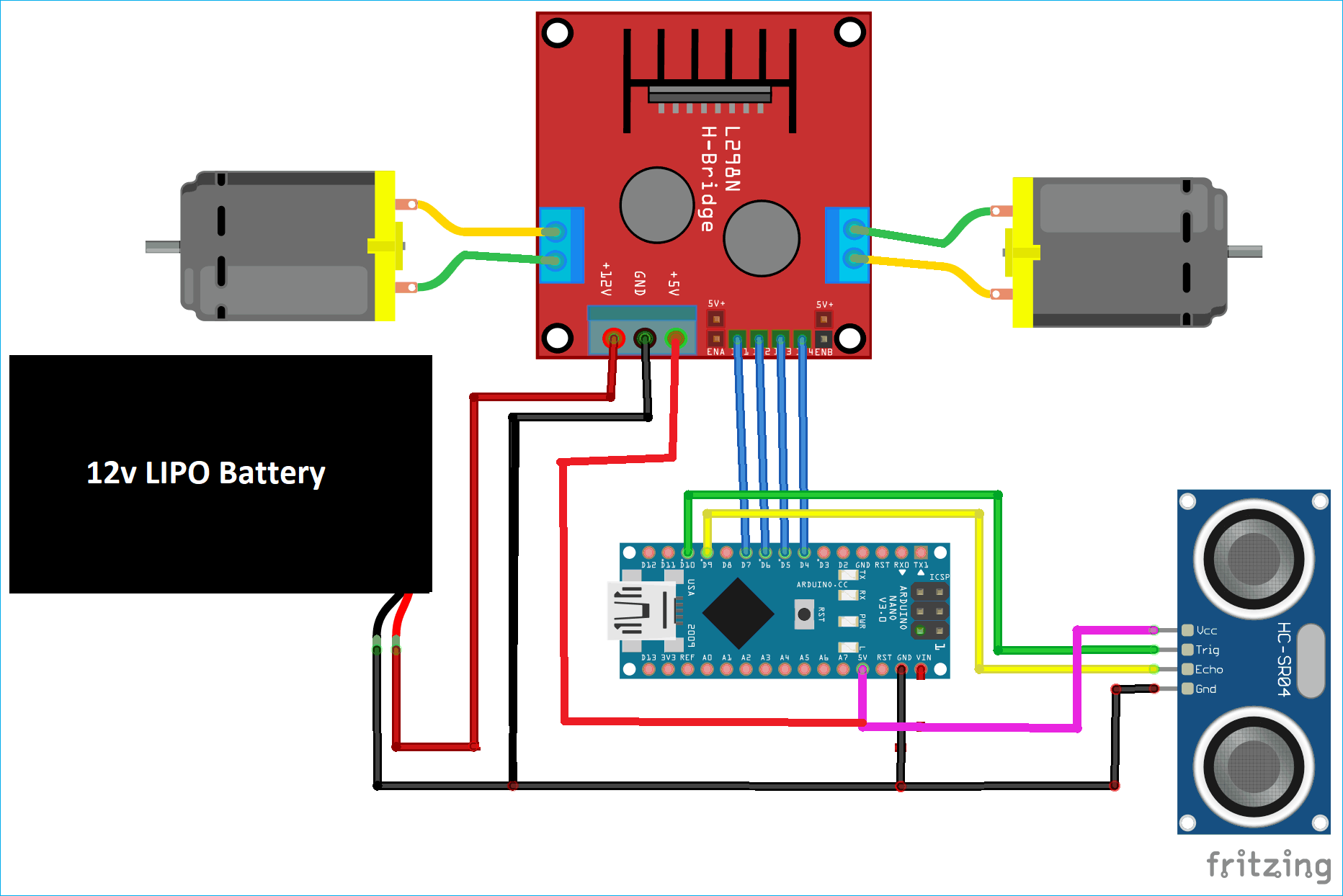
int trigPin = 12; // trig pin of HC-SR04
int echoPin = 13; // Echo pin of HC-SR04
int revleft4 = 5; //REVerse motion of Left motor
int fwdleft5 = 4; //ForWarD motion of Left motor
int revright6 = 3; //REVerse motion of Right motor
int fwdright7 = 2; //ForWarD motion of Right motor
long duration, distance;
void setup() {
delay(random(500,2000)); // delay for random time
Serial.begin(9600);
pinMode(revleft4, OUTPUT); // set Motor pins as output
pinMode(fwdleft5, OUTPUT);
pinMode(revright6, OUTPUT);
pinMode(fwdright7, OUTPUT);
pinMode(trigPin, OUTPUT); // set trig pin as output
pinMode(echoPin, INPUT); //set echo pin as input to capture reflected waves
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // send waves for 10 us
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH); // receive reflected waves
distance = duration / 58.2; // convert to distance
delay(10);
// If you dont get proper movements of your robot then alter the pin numbers
if (distance > 20)
{
digitalWrite(fwdright7, HIGH); // move forward
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, HIGH);
digitalWrite(revleft4, LOW);
}
if (distance < 25)
{
digitalWrite(fwdright7, LOW); //Stop
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, LOW);
delay(500);
digitalWrite(fwdright7, LOW); //movebackword
digitalWrite(revright6, HIGH);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, HIGH);
delay(500);
digitalWrite(fwdright7, LOW); //Stop
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, LOW);
delay(100);
digitalWrite(fwdright7, HIGH);
digitalWrite(revright6, LOW);
digitalWrite(revleft4, LOW);
digitalWrite(fwdleft5, LOW);
delay(500);
}
}
int trigPin = 12; // trig pin of HC-SR04
int echoPin = 13; // Echo pin of HC-SR04
int revleft4 = 5; //REVerse motion of Left motor
int fwdleft5 = 4; //ForWarD motion of Left motor
int revright6 = 3; //REVerse motion of Right motor
int fwdright7 = 2; //ForWarD motion of Right motor
long duration, distance;
void setup() {
delay(random(500,2000)); // delay for random time
Serial.begin(9600);
pinMode(revleft4, OUTPUT); // set Motor pins as output
pinMode(fwdleft5, OUTPUT);
pinMode(revright6, OUTPUT);
pinMode(fwdright7, OUTPUT);
pinMode(trigPin, OUTPUT); // set trig pin as output
pinMode(echoPin, INPUT); //set echo pin as input to capture reflected waves
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // send waves for 10 us
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH); // receive reflected waves
distance = duration / 58.2; // convert to distance
delay(10);
// If you dont get proper movements of your robot then alter the pin numbers
if (distance > 20)
{
digitalWrite(fwdright7, HIGH); // move forward
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, HIGH);
digitalWrite(revleft4, LOW);
}
if (distance < 25)
{
digitalWrite(fwdright7, LOW); //Stop
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, LOW);
delay(500);
digitalWrite(fwdright7, LOW); //movebackword
digitalWrite(revright6, HIGH);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, HIGH);
delay(500);
digitalWrite(fwdright7, LOW); //Stop
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, LOW);
delay(100);
digitalWrite(fwdright7, HIGH);
digitalWrite(revright6, LOW);
digitalWrite(revleft4, LOW);
digitalWrite(fwdleft5, LOW);
delay(500);
}
}

377 projects • 397 followers
I'm Arnov. I build, design, and experiment with tech—3D printing, PCB design, and retro consoles are my jam.







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments