/*
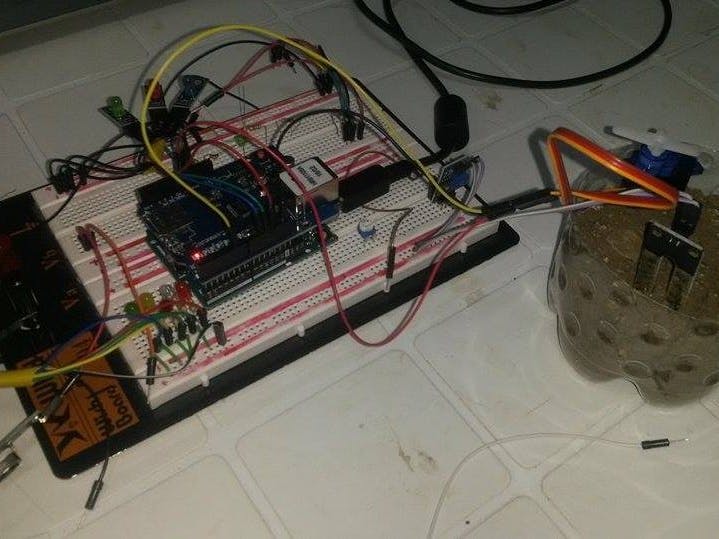
HC-SR04 Ping distance sensor]
VCC to arduino 5v GND to arduino GND
Echo to Arduino pin 13 Trig to Arduino pin 12
2 RGB LEDS set on PWM channels on ARDUINO UNO: 11,10,9,6,5,3;
6 RGB LEDS
TOWER PRO MICRO SERVO 9g SG90
Generic Buzzer version 1.0
TO CONTINUE:
ADD ANALOG SENSOR
*/
#include <Servo.h>
/*
#define trigPin 13
#define echoPin 12
*/
int servoPin = 6;
Servo servo;
int servoAngle = 0; //pozitia servoului in grade
int pos;
#define C0 16.35
#define Db0 17.32
#define D0 18.35
#define Eb0 19.45
#define E0 20.60
#define F0 21.83
#define Gb0 23.12
#define G0 24.50
#define Ab0 25.96
#define LA0 27.50
#define Bb0 29.14
#define B0 30.87
#define C1 32.70
#define Db1 34.65
#define D1 36.71
#define Eb1 38.89
#define E1 41.20
#define F1 43.65
#define Gb1 46.25
#define G1 49.00
#define Ab1 51.91
#define LA1 55.00
#define Bb1 58.27
#define B1 61.74
#define C2 65.41
#define Db2 69.30
#define D2 73.42
#define Eb2 77.78
#define E2 82.41
#define F2 87.31
#define Gb2 92.50
#define G2 98.00
#define Ab2 103.83
#define LA2 110.00
#define Bb2 116.54
#define B2 123.47
#define C3 130.81
#define Db3 138.59
#define D3 146.83
#define Eb3 155.56
#define E3 164.81
#define F3 174.61
#define Gb3 185.00
#define G3 196.00
#define Ab3 207.65
#define LA3 220.00
#define Bb3 233.08
#define B3 246.94
#define C4 261.63
#define Db4 277.18
#define D4 293.66
#define Eb4 311.13
#define E4 329.63
#define F4 349.23
#define Gb4 369.99
#define G4 392.00
#define Ab4 415.30
#define LA4 440.00
#define Bb4 466.16
#define B4 493.88
#define C5 523.25
#define Db5 554.37
#define D5 587.33
#define Eb5 622.25
#define E5 659.26
#define F5 698.46
#define Gb5 739.99
#define G5 783.99
#define Ab5 830.61
#define LA5 880.00
#define Bb5 932.33
#define B5 987.77
#define C6 1046.50
#define Db6 1108.73
#define D6 1174.66
#define Eb6 1244.51
#define E6 1318.51
#define F6 1396.91
#define Gb6 1479.98
#define G6 1567.98
#define Ab6 1661.22
#define LA6 1760.00
#define Bb6 1864.66
#define B6 1975.53
#define C7 2093.00
#define Db7 2217.46
#define D7 2349.32
#define Eb7 2489.02
#define E7 2637.02
#define F7 2793.83
#define Gb7 2959.96
#define G7 3135.96
#define Ab7 3322.44
#define LA7 3520.01
#define Bb7 3729.31
#define B7 3951.07
#define C8 4186.01
#define Db8 4434.92
#define D8 4698.64
#define Eb8 4978.03
// DURATION OF THE NOTES
#define BPM 120 // you can change this value changing all the others
#define H 2*Q //half 2/4
#define Q 60000/BPM //quarter 1/4
#define E Q/2 //eighth 1/8
#define S Q/4 // sixteenth 1/16
#define W 4*Q // whole 4/4
/*
int redLED1 = 11;
int greenLED1 = 10;
int blueLED1 = 9;
int redLED2 = 6;
int greenLED2 = 5;
int blueLED2 = 3;
void setColor1( int redValue, int greenValue, int blueValue) {
analogWrite(redLED1, redValue);
analogWrite(greenLED1, greenValue);
analogWrite(blueLED1, blueValue);
}
void setColor2( int redValue, int greenValue, int blueValue) {
analogWrite(redLED2, redValue);
analogWrite(greenLED2, greenValue);
analogWrite(blueLED2, blueValue);
}
*/
void Miscare2() {
for (pos = 0; pos < 165; pos += 1)
{
servo.write(pos);
delay(25);
}
for (pos = 165; pos >= 0; pos -= 1)
{
servo.write(pos);
delay(25);
}
}
void Imperial()
{
tone(8,LA3,Q);
delay(1+Q); //delay duration should always be 1 ms more than the note in order to separate them.
tone(8,LA3,Q);
delay(1+Q);
tone(8,LA3,Q);
delay(1+Q);
tone(8,F3,E+S);
delay(1+E+S);
tone(8,C4,S);
delay(1+S);
tone(8,LA3,Q);
delay(1+Q);
tone(8,F3,E+S);
delay(1+E+S);
tone(8,C4,S);
delay(1+S);
tone(8,LA3,H);
delay(1+H);
tone(8,E4,Q);
delay(1+Q);
tone(8,E4,Q);
delay(1+Q);
tone(8,E4,Q);
delay(1+Q);
tone(8,F4,E+S);
delay(1+E+S);
tone(8,C4,S);
delay(1+S);
tone(8,Ab3,Q);
delay(1+Q);
tone(8,F3,E+S);
delay(1+E+S);
tone(8,C4,S);
delay(1+S);
tone(8,LA3,H);
delay(1+H);
tone(8,LA4,Q);
delay(1+Q);
tone(8,LA3,E+S);
delay(1+E+S);
tone(8,LA3,S);
delay(1+S);
tone(8,LA4,Q);
delay(1+Q);
tone(8,Ab4,E+S);
delay(1+E+S);
tone(8,G4,S);
delay(1+S);
tone(8,Gb4,S);
delay(1+S);
tone(8,E4,S);
delay(1+S);
tone(8,F4,E);
delay(1+E);
delay(1+E);//PAUSE
tone(8,Bb3,E);
delay(1+E);
tone(8,Eb4,Q);
delay(1+Q);
tone(8,D4,E+S);
delay(1+E+S);
tone(8,Db4,S);
delay(1+S);
tone(8,C4,S);
delay(1+S);
tone(8,B3,S);
delay(1+S);
tone(8,C4,E);
delay(1+E);
delay(1+E);//PAUSE QUASI FINE RIGA
tone(8,F3,E);
delay(1+E);
tone(8,Ab3,Q);
delay(1+Q);
tone(8,F3,E+S);
delay(1+E+S);
tone(8,LA3,S);
delay(1+S);
tone(8,C4,Q);
delay(1+Q);
tone(8,LA3,E+S);
delay(1+E+S);
tone(8,C4,S);
delay(1+S);
tone(8,E4,H);
delay(1+H);
tone(8,LA4,Q);
delay(1+Q);
tone(8,LA3,E+S);
delay(1+E+S);
tone(8,LA3,S);
delay(1+S);
tone(8,LA4,Q);
delay(1+Q);
tone(8,Ab4,E+S);
delay(1+E+S);
tone(8,G4,S);
delay(1+S);
tone(8,Gb4,S);
delay(1+S);
tone(8,E4,S);
delay(1+S);
tone(8,F4,E);
delay(1+E);
delay(1+E);//PAUSE
tone(8,Bb3,E);
delay(1+E);
tone(8,Eb4,Q);
delay(1+Q);
tone(8,D4,E+S);
delay(1+E+S);
tone(8,Db4,S);
delay(1+S);
tone(8,C4,S);
delay(1+S);
tone(8,B3,S);
delay(1+S);
tone(8,C4,E);
delay(1+E);
delay(1+E);//PAUSE QUASI FINE RIGA
tone(8,F3,E);
delay(1+E);
tone(8,Ab3,Q);
delay(1+Q);
tone(8,F3,E+S);
delay(1+E+S);
tone(8,C4,S);
delay(1+S);
tone(8,LA3,Q);
delay(1+Q);
tone(8,F3,E+S);
delay(1+E+S);
tone(8,C4,S);
delay(1+S);
tone(8,LA3,H);
delay(1+H);
delay(2*H);
}
void Miscare()
{
servo.write(0);
delay(100);
servo.write(30);
delay(1000);
servo.write(45);
delay(1000);
servo.write(90);
delay(1000);
servo.write(135);
delay(1000);
servo.write(90);
delay(500);
servo.write(45);
delay(500);
servo.write(30);
delay(500);
servo.write(0);
delay(500);
for(servoAngle = 0; servoAngle < 180; servoAngle++)
{
servo.write(servoAngle);
delay(21);
}
/*
for(servoAngle = 180; servoAngle > 0; servoAngle--)
{
servo.write(servoAngle);
delay(10);
}
*/
}
void setup() {
Serial.begin (9600);
/* one time i made to work with rgb leds
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(redLED1, OUTPUT);
pinMode(greenLED1, OUTPUT);
pinMode(blueLED1, OUTPUT);
pinMode(redLED2, OUTPUT);
pinMode(greenLED2, OUTPUT);
pinMode(blueLED2, OUTPUT);
*/
pinMode(12, OUTPUT);
pinMode(11, OUTPUT);
pinMode(10, OUTPUT);
servo.attach(servoPin);
pinMode(9, OUTPUT);
}
void loop() {
int iluminare = analogRead(0);
/* Another try / good to look if you have a similar project
Serial.println(iluminare);
delay(100);
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2); // Added this line
digitalWrite(trigPin, HIGH);
// delayMicroseconds(1000); - Removed this line
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance < 4) { // This is where the LED On/Off happens
setColor1(100, 100, 100);
setColor2(0, 150, 250);
}
else {
Miscare();
setColor1(255, 0, 0); //RED
setColor2(255, 0, 0); //RED
}
if (distance >= 200 || distance <= 0){
Serial.println("Out of range");
setColor1(0, 0, 255); //BLUE
delay(100);
setColor2(0 , 0, 255); //BLUE
}
else {
Serial.print(distance);
Serial.println(" CM");
}
delay(500);
*/
/*delay(100);
for (int i = 1500; i < 4000; i++) {
tone(11,i);
delay(21);
}
*/
Serial.println(iluminare);
delay(10);
if (iluminare > 120)
{
for(int i = 0; i < 255; i++) {
analogWrite(11, i);
delay(21);
}
for (int i = 255; i > 0; i--) {
analogWrite(11, i);
delay(5);
}
}
//servo.stop();
//ton inceput procedura
if (iluminare < 120)
{
Miscare();
digitalWrite(12, HIGH);
delay(2500);
digitalWrite(12, LOW);
delay(100);
Miscare2();
digitalWrite(10, HIGH);
delay(2500);
digitalWrite(10, LOW);
delay(100);
//ton oprire procedura
}
digitalWrite(10, LOW);
delay(500);
digitalWrite(12, LOW);
delay(500);
digitalWrite(11, HIGH);
delay(210);
digitalWrite(11, LOW);
delay(200);
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








Comments