

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Before going to build the robot, it is important to understand how the ultrasonic sensor works because this sensor will have important role in detecting obstacle. The basic principle behind the working of ultrasonic sensor is to note down the time taken by sensor to transmit ultrasonic beams and receiving the ultrasonic beams after hitting the surface. Then further the distance is calculated using the formula. In this project, the widely available HC-SR04 Ultrasonic Sensor is used. To use this sensor, similar approach will be followed explained above.
So, the Trig pin of HC-SR04 is made high for at least 10 us. A sonic beam is transmitted with 8 pulses of 40KHz each.
The signal then hits the surface and return back and captured by the receiver Echo pin of HC-SR04. The Echo pin had already made high at the time sending high.
The time taken by beam to return back is saved in variable and converted to distance using appropriate calculations like belowDistance= (Time x Speed of Sound in Air (343 m/s))/2
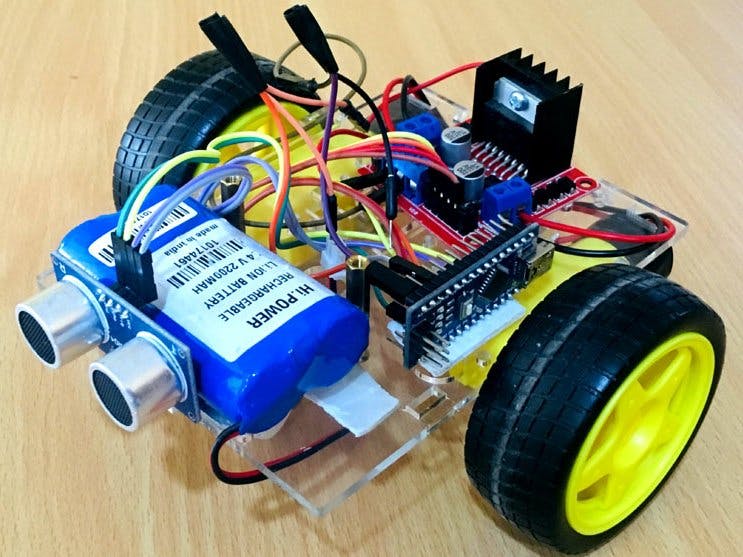
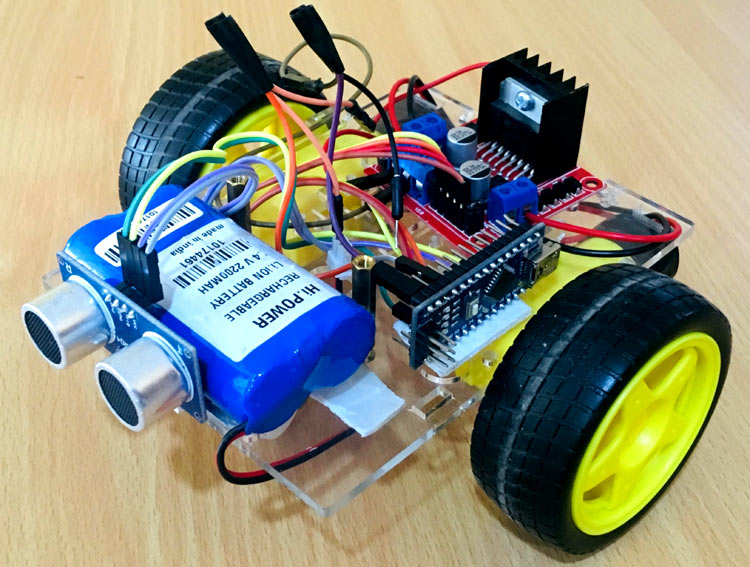
chassis, any toy chassis can be used or can be customade.- Arduino NANO or Uno (any version)
- HC-SR04 Ultrasonic Sensor
- LM298N Motor Driver Module
- 5V DC Motors
- Battery
- Wheels
- Chassis
- Jumper Wires
If you don't make your PCBs yourself, where do you make them?Personally, I do not have the space and the courage (nor the skill) to do them myself.For SF, I turn to Util-Pocket, because I find that the quality is excellent for the price.For the DF (with metallic holes), I tried several companies, all of which do a good job, but it costs a lot.This time I addressed myself here. I had 3 circuits to do, totaling an average surface of 49 cm2.When I saw that the minimum quantity to order was 5 PCBs, I continued my order out of curiosity, just to see the quote.And when I saw the asking price, I placed the order. NEXTPCB.com
Nextpcb PCB (prototype)Admittedly, it's still too expensive, but compared to others, I don't think there is a photo. Well, do not do it every day...I do not advertise, but we can also say when we are satisfied.If it could interest someone...
Complete program with a demonstration video is given at the end of this project. The program will include setting up HC-SR04 module and outputting the signals to Motor Pins to move motor direction accordingly. No libraries will be used in this project.
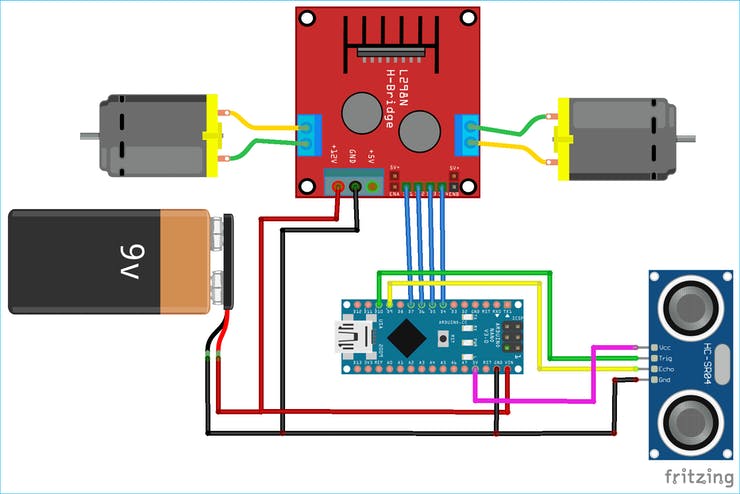
First define trig and echo pin of HC-SR04 in the program. In this project the trig pin is connected to GPIO9 and echo pin is connected to GPIO10 of Arduino NANO.
int trigPin = 9; // trig pin of HC-SR04
int echoPin = 10; // Echo pin of HC-SR04Define pins for input of LM298N Motor Driver Module. The LM298N has 4 data input pins used to control the direction of motor connected to it.
int revleft4 = 4; //REVerse motion of Left motor
int fwdleft5 = 5; //ForWarD motion of Left motor
int revright6 = 6; //REVerse motion of Right motor
int fwdright7 = 7; //ForWarD motion of Right motor📷LM298N Motor Driver Module
In setup() function, define the data direction of utilised GPIO pins. The four Motor pins and Trig pin is set as OUTPUT and Echo Pin is set as Input.
pinMode(revleft4, OUTPUT); // set Motor pins as output
pinMode(fwdleft5, OUTPUT);
pinMode(revright6, OUTPUT);
pinMode(fwdright7, OUTPUT);
pinMode(trigPin, OUTPUT); // set trig pin as output
pinMode(echoPin, INPUT); //set echo pin as input to capture reflected wavesIn loop() function, get the distance from HC-SR04 and based on the distance move the motor direction. The distance will show the object distance coming in front of the robot. The Distance is taken by bursting a beam of ultrasonic up to 10 us and receiving it after 10us. To learn more about measuring distance using Ultrasonic sensor and Arduino, follow the link.
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // send waves for 10 us
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH); // receive reflected waves
distance = duration / 58.2; // convert to distance
delay(10);If the distance is greater than the defined distance means there is not obstacle in its path and it will moving in forward direction.
if (distance > 19)
{
digitalWrite(fwdright7, HIGH); // move forward
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, HIGH);
digitalWrite(revleft4, LOW);
}If the distance is less than the defined distance to avoid obstacle means there is some obstacle ahead. So in this situation robot will stop for a while and movebackwards after that again stop for a while and then take turn to another direction.
if (distance < 18)
{
digitalWrite(fwdright7, LOW); //Stop
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, LOW);
delay(500);
digitalWrite(fwdright7, LOW); //movebackword
digitalWrite(revright6, HIGH);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, HIGH);
delay(500);
digitalWrite(fwdright7, LOW); //Stop
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, LOW);
digitalWrite(revleft4, LOW);
delay(100);
digitalWrite(fwdright7, HIGH);
digitalWrite(revright6, LOW);
digitalWrite(revleft4, LOW);
digitalWrite(fwdleft5, LOW);
delay(500);
}this is how a robot can avoid obstacles in its path without getting stuck anywhere.
Code
int trigPin = 9; // trig pin of HC-SR04int echoPin = 10; // Echo pin of HC-SR04
int revleft4 = 4; //REVerse motion of Left motorint fwdleft5 = 5; //ForWarD motion of Left motorint revright6 = 6; //REVerse motion of Right motorint fwdright7 = 7; //ForWarD motion of Right motor
long duration, distance;
void setup() { delay(random(500, 2000)); // delay for random time Serial.begin(9600); pinMode(revleft4, OUTPUT); // set Motor pins as output pinMode(fwdleft5, OUTPUT); pinMode(revright6, OUTPUT); pinMode(fwdright7, OUTPUT); pinMode(trigPin, OUTPUT); // set trig pin as output pinMode(echoPin, INPUT); //set echo pin as input to capture reflected waves}
void loop() {
digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); // send waves for 10 us delayMicroseconds(10); duration = pulseIn(echoPin, HIGH); // receive reflected waves distance = duration / 58.2; // convert to distance delay(10); // If you dont get proper movements of your robot then alter the pin numbers if (distance > 19) { digitalWrite(fwdright7, HIGH); // move forward digitalWrite(revright6, LOW); digitalWrite(fwdleft5, HIGH); digitalWrite(revleft4, LOW); }
if (distance < 18) { digitalWrite(fwdright7, LOW); //Stop digitalWrite(revright6, LOW); digitalWrite(fwdleft5, LOW); digitalWrite(revleft4, LOW); delay(500); digitalWrite(fwdright7, LOW); //movebackword digitalWrite(revright6, HIGH); digitalWrite(fwdleft5, LOW); digitalWrite(revleft4, HIGH); delay(500); digitalWrite(fwdright7, LOW); //Stop digitalWrite(revright6, LOW); digitalWrite(fwdleft5, LOW); digitalWrite(revleft4, LOW); delay(100); digitalWrite(fwdright7, HIGH); digitalWrite(revright6, LOW); digitalWrite(revleft4, LOW); digitalWrite(fwdleft5, LOW); delay(500); }
}







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments