


Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Background
Wheel building is one of the most daunting tasks one can undertake in building a bicycle from the ground up. Technically anybody could build a wheel with a screwdriver and a spoke wrench, but the results of building a wheel on a budget is usually very apparent. A shop equipped with purpose made spoke tension, hub dish, and truing tools will be able to build a wheel with the highest precision and therefore save you money long term. A wheel that is built correctly the first time will stay true longer and be less likely to fail upon hard impact. However, no wheel will survive abuse forever without some maintenance, so truing and adjusting spoke tension periodically is something that every serious cycling enthusiast should consider learning.
Truing a wheel involves tightening or loosening spoke tension in order pull the rim in a particular direction. Tightening spokes attached to the left side of the wheel hub will pull the rim in that direction, while loosening spokes attached to the left side will pull the rim in the opposite direction. The same concept applies for spokes attached to the other side of the hub. It is important to remove the wheel after a large amount of adjustments and apply pressure to the rim to help seat spoke nipples and relieve stress in the spokes.
As you apply more or less tension in individual spokes, the dish of the wheel will likely be affected. Luckily dishing a wheel only involves tightening or loosening all spokes on one side in small increments to help shift the hub alignment with the rim. This process is relatively simple and can be done fairly easily without specialty tools, although proper tools always help.
Radially truing is a slightly more difficult task to take on, however making minor changes to spoke tension to correct the lateral true of a wheel will likely not affect its radial true.
Using zip ties on the fork or frame as a make-shift truing device tend to work well for correcting very pronounced wheel wobbles, however this method doesn't offer any real level of precision. Getting a precise true on a wheel typically necessitates having a home truing stand. These home use stands usually cost at least 75$, and to get a stand that will ensure shop level precision you will likely spend close to 200$. In general, even the most expensive truing stands still utilize simple small feelers that are adjusted using a feed screw until contact is made with the wheel. These stands rely on your ability to hear pinging noises or visually identify when the feelers are contacting the wheel as you spin it. Accurate trues can absolutely be achieved with these stands, but doing so requires quite a bit of experience in identifying the sounds and visual ques that the most out of true part of the wheel will make upon contact. Spinning the wheel is the only way to effectively identify the spots where the feelers make contact, so identifying the spokes that need the most adjustment can be a bit difficult. Also since the wheel is spinning and making contact with something metal, there is always a chance that a low quality truing stand could scratch your wheel paint.
Our Project
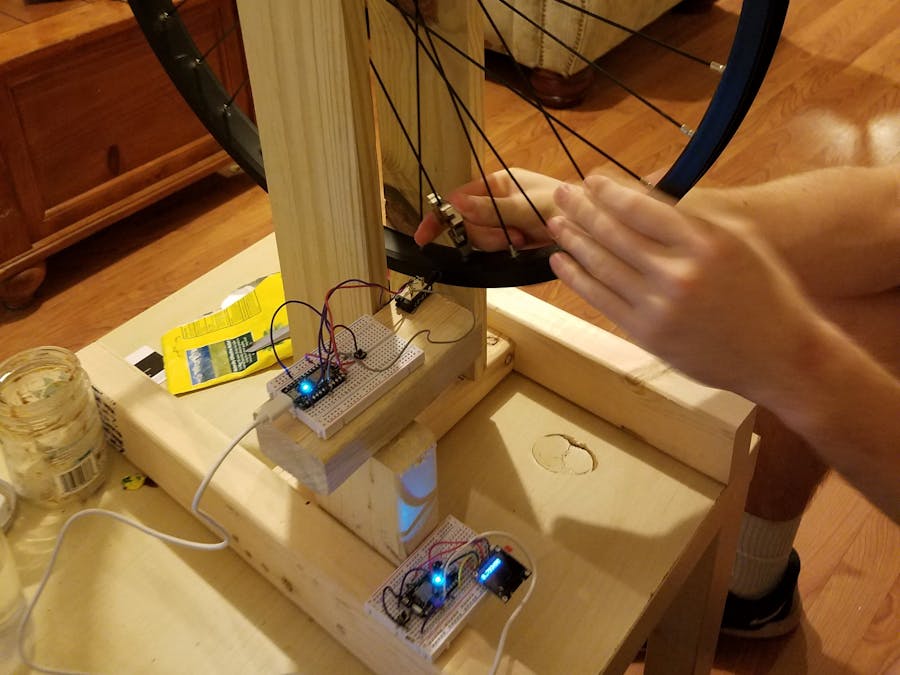
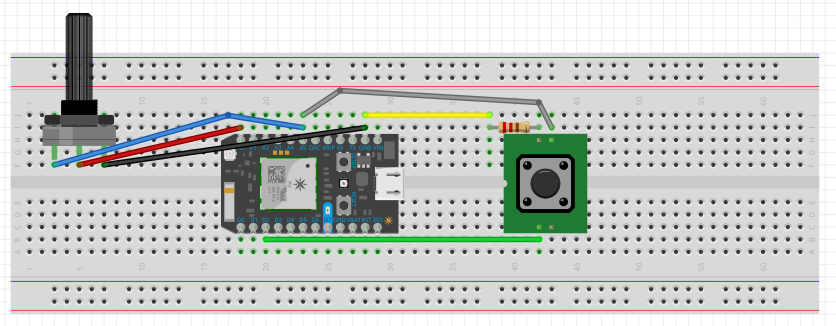
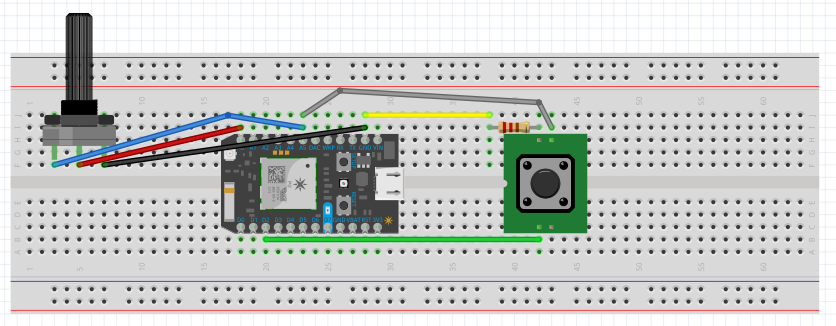
The above listed issues inspired us to design and wheel truing stand that could use the capabilities of a spring loaded linear potentiometer as a means of truing a wheel. For simplicity, a wooden stand was designed specifically around an extra wheel we had on hand to purposely bend and true again.
However, this potentiometer could be mounted directly to a fork or frame as is done with the "zip tie method" to conveniently true any size wheel (given a proper mounting method to manage the sensor and its accompanying particle board).
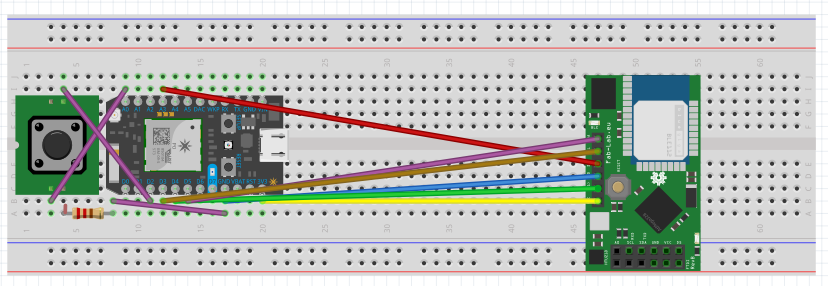
The potentiometer is programmed with two functional buttons and a OLED readout. A button located on the particle board managing the sensor operation will run a code calculating maximum deviation of the wheel as its spun over a 10 second period. This data will be posted to ThingSpeak as a graph to track ones progress is improving the true of the wheel.
The Thingspeak graph can be viewed here: https://thingspeak.com/channels/745587
Another button located on the particle board managing the OLED can be pressed once the wheel is mounted to zero the sensor at the point where the wheel deviates farthest from the sensor (ensuring the wheel always contacts the sensor). As one spins the wheel, the sensor will update every second and provide a readout.
Truing the wheel still involves the same tedious spoke tension adjustment process with our stand as it does with any other stand, but the precision and ease of use achieved with a potentiometer is unrivaled by any purely mechanical wheel truing stand.



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments