/****************************************************************************
BYJ48 Stepper motor code
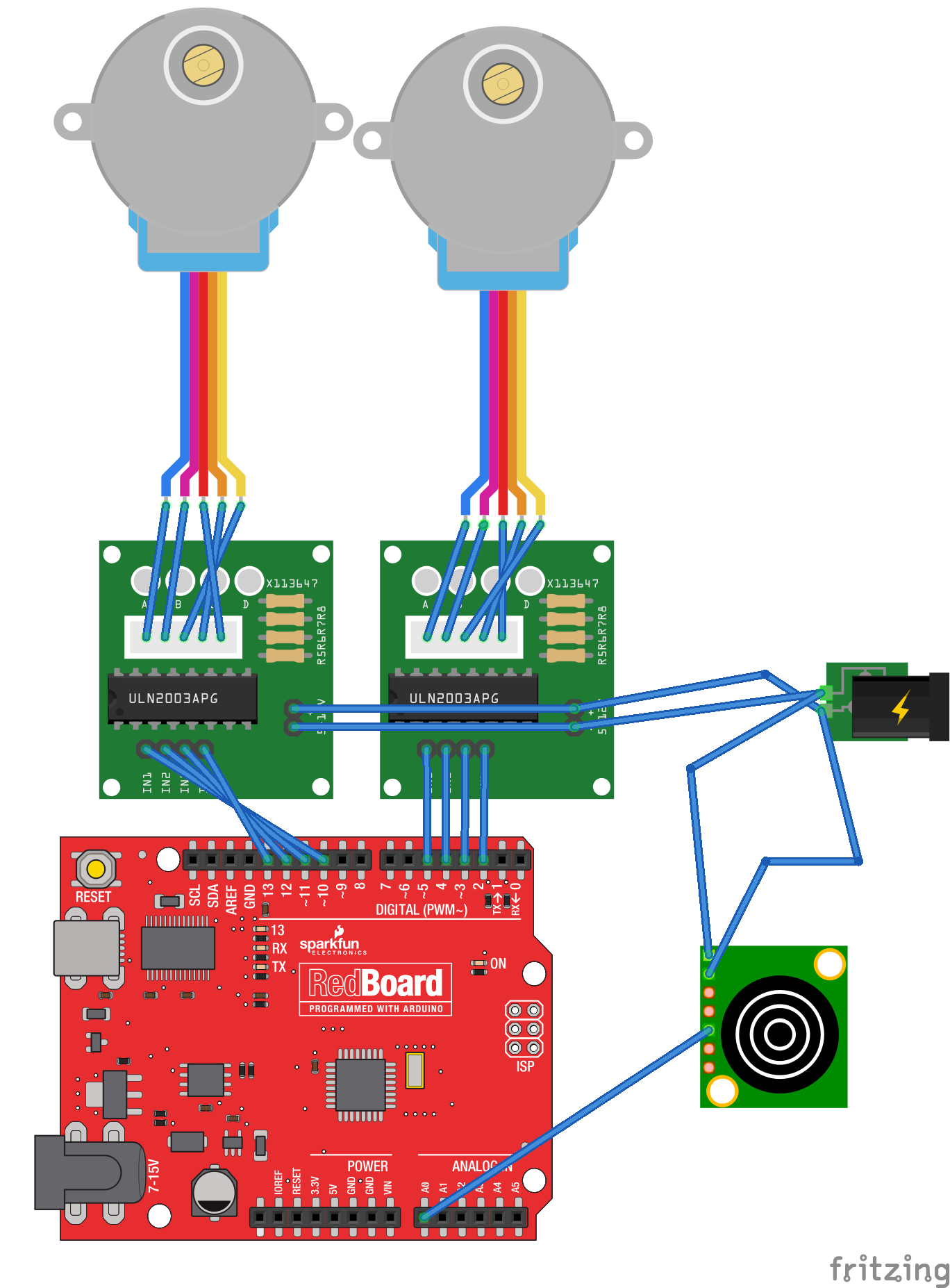
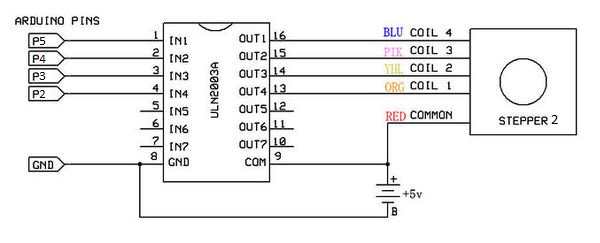
Connect :
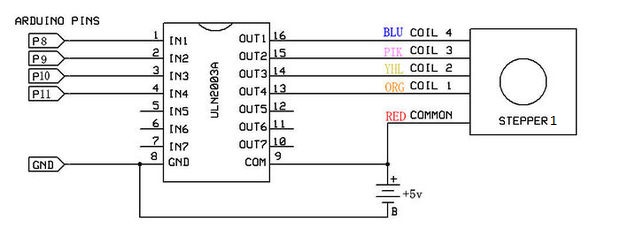
Stepper 1
IN1 >> D8
IN2 >> D9
IN3 >> D10
IN4 >> D11
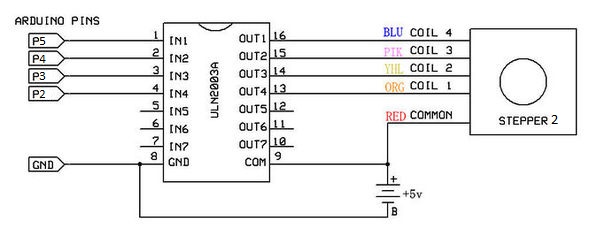
Stepper 2
IN1 >> D5
IN2 >> D4
IN3 >> D3
IN4 >> D2
VCC ... 5V Prefer to use external 5V Source
Gnd
written By :Mohannad Rawashdeh
http://www.instructables.com/member/Mohannad+Rawashdeh/
28/9/2013
Edited by Team Direct: Added second motor, runs in opposite direction.
http://www.hackster.io/direct/back-saver
**************************************************************************/
#define IN1 10
#define IN2 11
#define IN3 12
#define IN4 13
#define IN5 5
#define IN6 4
#define IN7 3
#define IN8 2
int Steps = 0;
boolean Direction = true;// gre
unsigned long last_time;
unsigned long currentMillis ;
int steps_left=4095;
long time;
void setup()
{
Serial.begin(115200);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(IN5, OUTPUT);
pinMode(IN6, OUTPUT);
pinMode(IN7, OUTPUT);
pinMode(IN8, OUTPUT);
// delay(1000);
}
void loop()
{
while(steps_left>0){
currentMillis = micros();
if(currentMillis-last_time>=1000){
stepper(1);
time=time+micros()-last_time;
last_time=micros();
steps_left--;
}
}
Serial.println(time);
Serial.println("Wait...!");
//delay(2000);0
Direction=1;//!Direction;
steps_left=4095;
}
void stepper(int xw){
for (int x=0;x<xw;x++){
switch(Steps){
case 0:
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
digitalWrite(IN5, HIGH);
digitalWrite(IN6, LOW);
digitalWrite(IN7, LOW);
digitalWrite(IN8, HIGH);
break;
case 1:
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
digitalWrite(IN5, HIGH);
digitalWrite(IN6, LOW);
digitalWrite(IN7, LOW);
digitalWrite(IN8, LOW);
break;
case 2:
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
digitalWrite(IN5, HIGH);
digitalWrite(IN6, HIGH);
digitalWrite(IN7, LOW);
digitalWrite(IN8, LOW);
break;
case 3:
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
digitalWrite(IN5, LOW);
digitalWrite(IN6, HIGH);
digitalWrite(IN7, LOW);
digitalWrite(IN8, LOW);
break;
case 4:
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN5, LOW);
digitalWrite(IN6, HIGH);
digitalWrite(IN7, HIGH);
digitalWrite(IN8, LOW);
break;
case 5:
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN5, LOW);
digitalWrite(IN6, LOW);
digitalWrite(IN7, HIGH);
digitalWrite(IN8, LOW);
break;
case 6:
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN5, LOW);
digitalWrite(IN6, LOW);
digitalWrite(IN7, HIGH);
digitalWrite(IN8, HIGH);
break;
case 7:
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
digitalWrite(IN5, LOW);
digitalWrite(IN6, LOW);
digitalWrite(IN7, LOW);
digitalWrite(IN8, HIGH);
break;
default:
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN5, LOW);
digitalWrite(IN6, LOW);
digitalWrite(IN7, LOW);
digitalWrite(IN8, LOW);
break;
}
SetDirection();
}
}
void SetDirection(){
if(Direction==1){ Steps++;}
if(Direction==0){ Steps--; }
if(Steps>7){Steps=0;}
if(Steps<0){Steps=7; }
}













_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments