


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
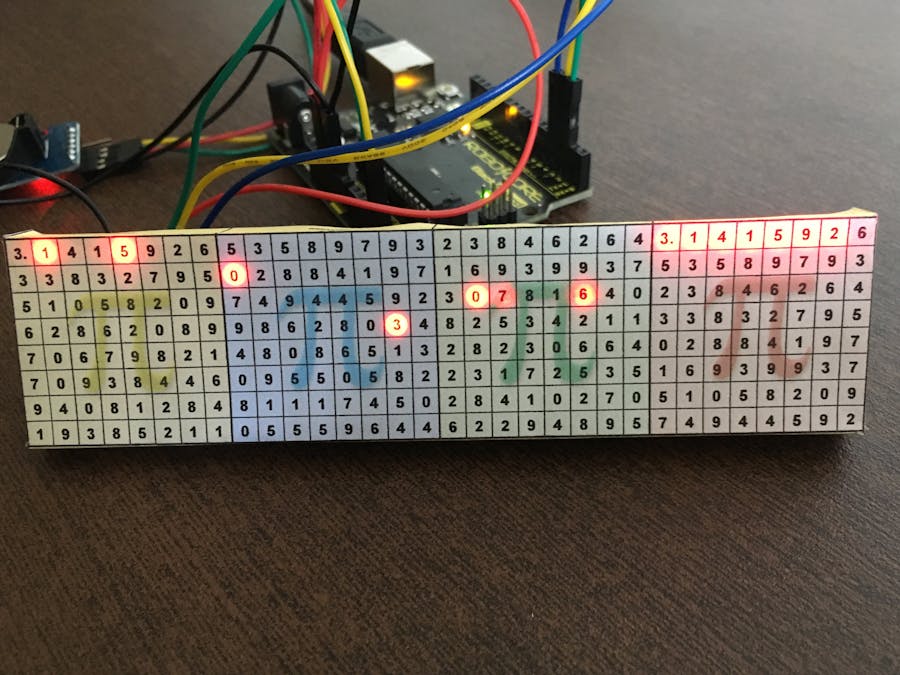
The Pi-Clock is a fun way to use the first 192 digits of irrational Pi number (3.1415926...) to display the time using a 32 x 8 LED matrix driven by Arduino.
The main challenge for coding this project was to figure out how to combine the digits of Pi to make the time readable.
Let's see it!
The Pi number is a mathematical constant and it is defined as the ration of a circle's circumference to its diameter (Pi = C/d).
Pi is a irrational number and cannot be expressed as a commom fraction.
Using high-precision multiplication algorithms is possible to calculate billions of digits. These methods are used to test super-computers.
Fortunately for this clock, the first 192 digits are enough.
Pi (192 digits):
3.14159265358979323846264338327950288419716939937510582097494459230781640628620899862803482534211706798214808651328230664709384460955058223172535940812848111745028410270193852110555964462294895
My algorithm split the hour, minute and seconds on its tens and units.
The position of tens and units are searched in the sequence of Pi digits to be converted into rows and columns of LED matrix.
This is very effective and fast.
This time I used a RTC (Real Time Clock) to provide a more accurate time reading than the Arduino can do.
Note:
Using DS1307RTC.h library is possible to setup the time on RTC according to the following statements on Arduino code:
setTime(21, 46, 00, 19, 01, 2019); // Set Time & Date (hh,mm,ss,dd,mm,yyyy)
RTC.set(now()); // Set RTC
After the setup, change the statements to comments before compiling the code again:
//setTime(21, 46, 00, 19, 01, 2019); // Set Time & Date
//RTC.set(now()); // Set RTC
The MAX7219 module is very simple to be used with LedControl library.
The following pin numbers of Arduino should be connected into LED matrix:
- Pin 2: connected to the DataIn (DIN)
- Pin 3: connected to LOAD (CS)
- Pin 4: connected to the CLK (CLK)
To read the clock, you should observe the following conventional sequence: starting from the top down and from the left to right.




Comments