// This #include statement was automatically added by the Particle IDE.
#include "lib1.h"
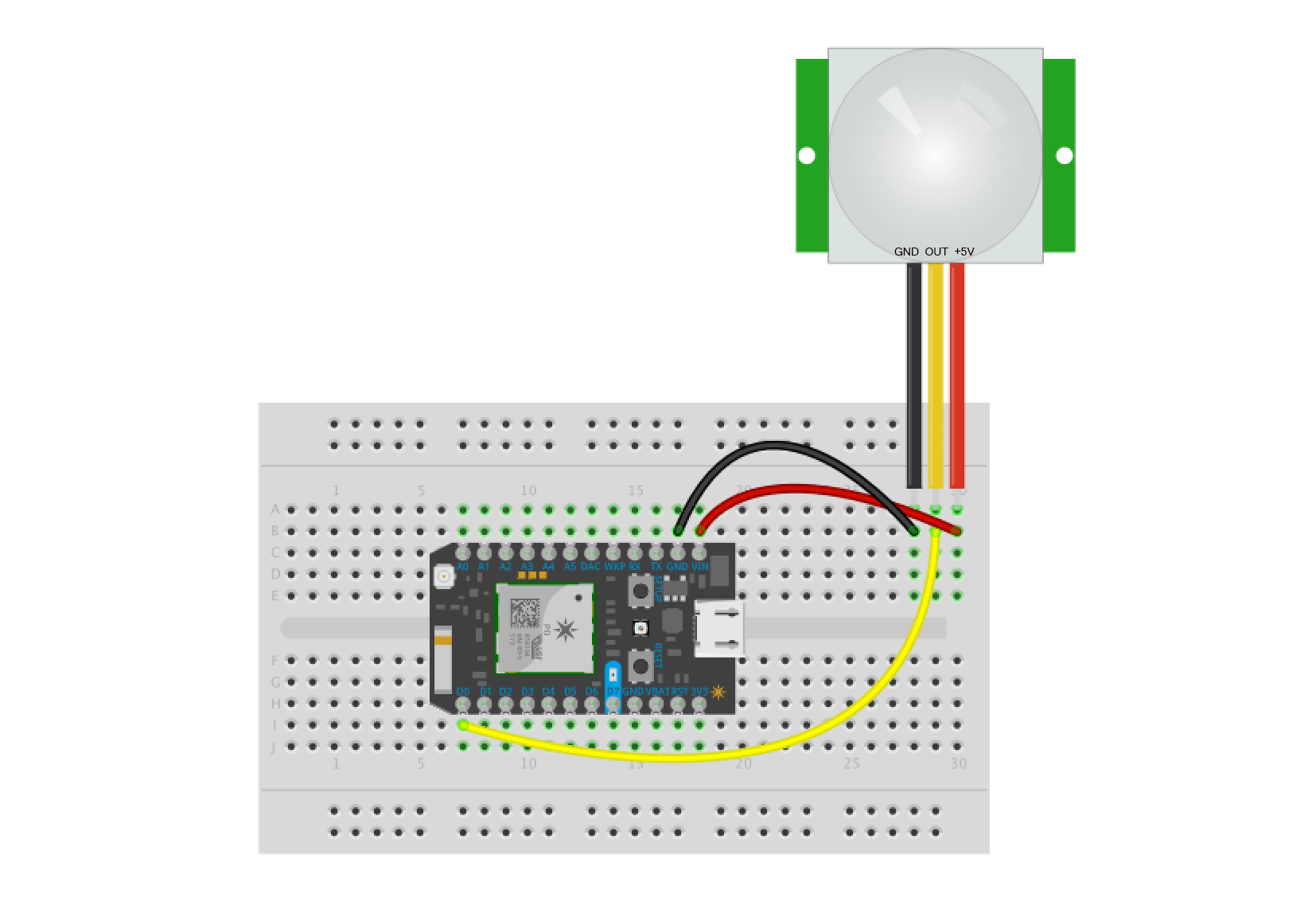
int inputPin = D0; // choose the input pin (for PIR sensor)
int ledPin = D1; // LED Pin
int pirState = LOW; // we start, assuming no motion detected
int val = 0; // variable for reading the pin status
int calibrateTime = 10000; // wait for the thingy to calibrate
void setup()
{
pinMode(ledPin, OUTPUT);
pinMode(inputPin, INPUT); // declare sensor as input
}
void loop()
{
// if the sensor is calibrated
if ( calibrated() )
{
// get the data from the sensor
readTheSensor();
// report it out, if the state has changed
reportTheData();
}
}
void readTheSensor() {
val = digitalRead(inputPin);
}
bool calibrated() {
return millis() - calibrateTime > 0;
}
void reportTheData() {
// if the sensor reads high
// or there is now motion
if (val == HIGH) {
// the current state is no motion
// i.e. it's just changed
// announce this change by publishing an eent
if (pirState == LOW) {
// we have just turned on
Particle.publish("Motion Detected", "Motion Detected", PRIVATE);
// Update the current state
pirState = HIGH;
setLED( pirState );
String tempMessage = "1";
Particle.publish("googleDocs", "{\"my-name\":\"" + tempMessage + "\"}", 60, PRIVATE);
Particle.publish("pushbullet", "Teacher Tracker: your teacher is back. RUN!", 60, PRIVATE);
}
} else {
if (pirState == HIGH)
// we have just turned of
// Update the current state
pirState = LOW;
setLED( pirState );
}
}
void setLED( int state )
{
digitalWrite( ledPin, state );
}
void publish() {
// Get some data
String data = String(10);
// Trigger the integration
Particle.publish("Motion detected", data, PRIVATE);
// Wait 60 seconds
delay(60000);
}














{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments