


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 5 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
I have been working with artists around the Sacramento creating systems they can use to make their work more interactive and robust. The one thing that bothers me a lot about microcontrollers in general is the high learning curve needed to use them. My goal with this project was to create an interactive sculpture platform that allows for the easy control of stepper motors and a stroboscope.
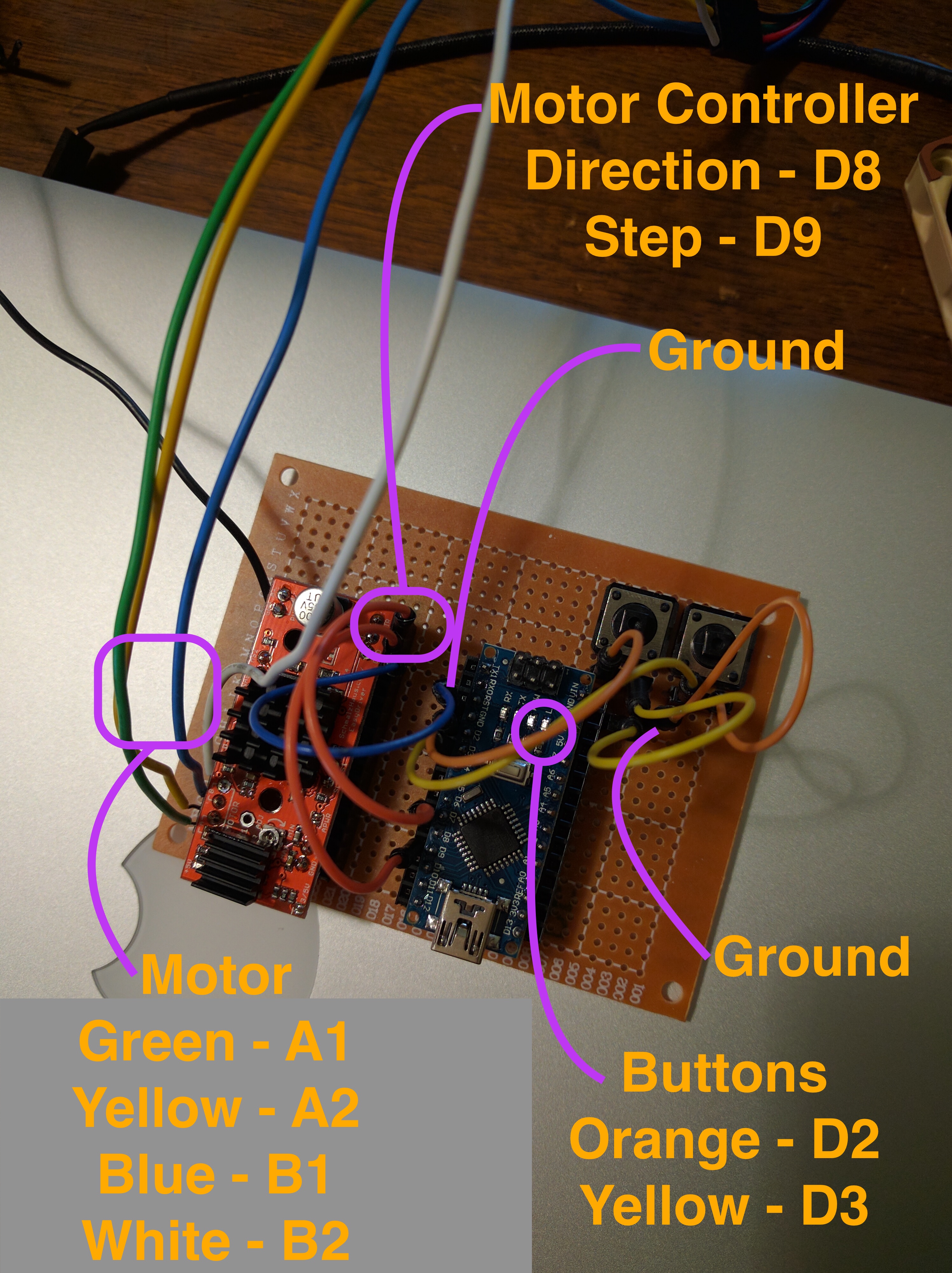
Stepper Motor Driver
ArduinoArduino File. It can easily be ported to Intel Edison. Code is messy but it's a early prototype.
#include <AccelStepper.h>
AccelStepper stepper(1, 9, 8);
int stepperSpeed = 100;
int count = 0;
const int pushButton1 = 2;
const int pushButton2 = 3;
int buttonCounter1 = 0;
int buttonCounter2 = 0;
void setup(){
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
digitalWrite(8, LOW);
pinMode(pushButton1, INPUT_PULLUP);
pinMode(pushButton2, INPUT_PULLUP);
while (count <= 10000)
{
digitalWrite(9, LOW); // This LOW to HIGH change is what creates the
digitalWrite(9, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(500); // This delay time is close to top speed for this
count++;
}
count = 0;
while (count <= 10000)
{
digitalWrite(9, LOW); // This LOW to HIGH change is what creates the
digitalWrite(9, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(200); // This delay time is close to top speed for this
count++;
}
count = 0;
while (count <= 10000)
{
digitalWrite(9, LOW); // This LOW to HIGH change is what creates the
digitalWrite(9, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(150); // This delay time is close to top speed for this
count++;
}
count = 0;
while (count <= 10000)
{
digitalWrite(9, LOW); // This LOW to HIGH change is what creates the
digitalWrite(9, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(125); // This delay time is close to top speed for this
count++;
}
count = 0;
while (count <= 10000)
{
digitalWrite(9, LOW); // This LOW to HIGH change is what creates the
digitalWrite(9, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(100); // This delay time is close to top speed for this
count++;
}
count = 0;
}
void loop() {
int pushButton1Val = digitalRead(pushButton1);
int pushButton2Val = digitalRead(pushButton2);
digitalWrite(9, LOW); // This LOW to HIGH change is what creates the
digitalWrite(9, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(stepperSpeed); // This delay time is close to top speed for this
// button 1 *************************************************
if (pushButton1Val == LOW) {
buttonCounter1 = buttonCounter1 + 1;
} else {
buttonCounter1 = 0;
}
if (buttonCounter1 > 5000) {
buttonCounter1 = 0;
// increment variable
if (stepperSpeed > 50) {
stepperSpeed = stepperSpeed - 10;
}
}
//// button 2 *************************************************
if (pushButton2Val == LOW) {
buttonCounter2 = buttonCounter2 + 1;
} else {
buttonCounter2 = 0;
}
if (buttonCounter2 > 5000) {
buttonCounter2 = 0;
// increment variable
if (stepperSpeed < 20000) {
stepperSpeed = stepperSpeed + 10;
}
}
}
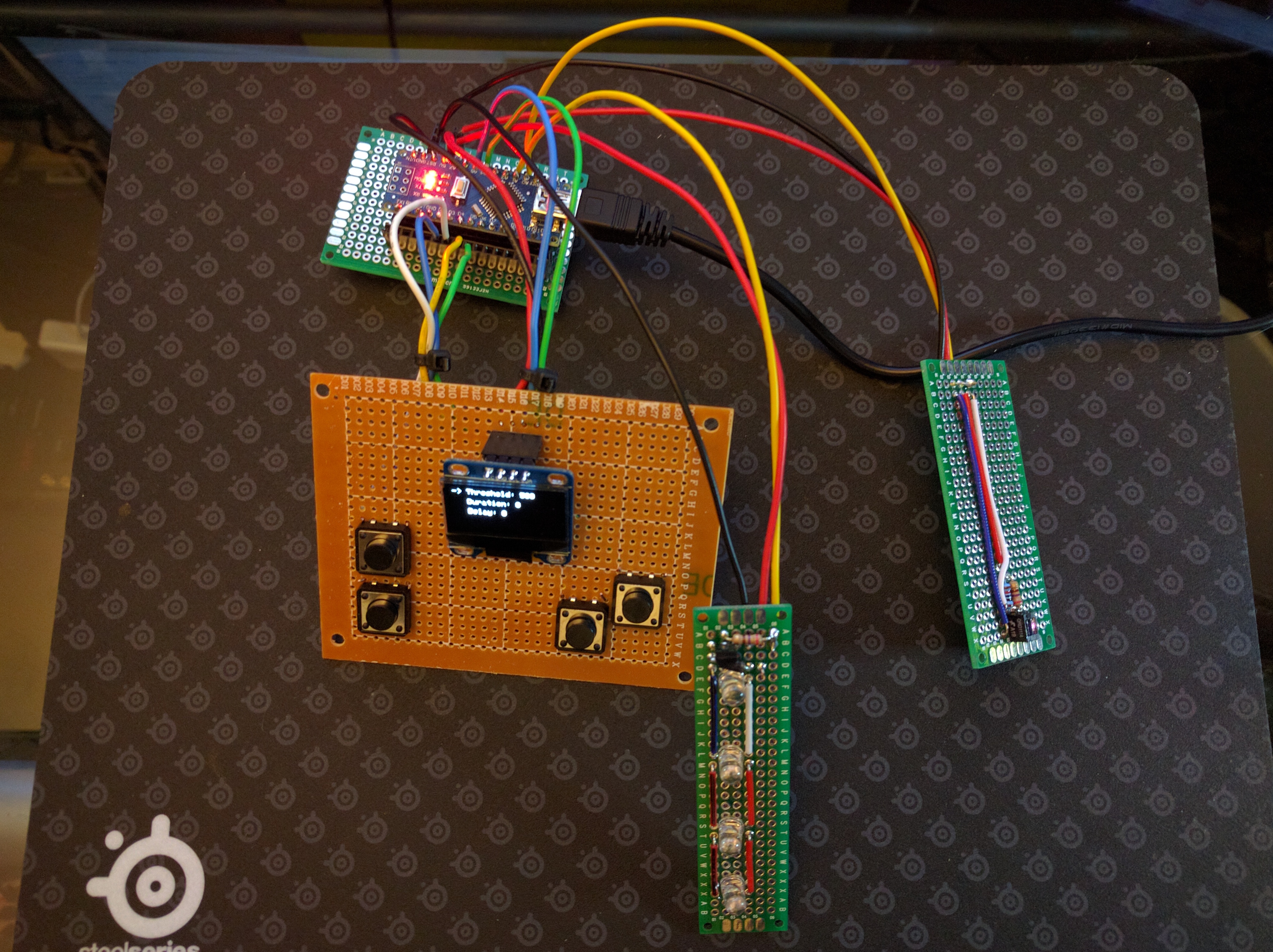
Stroboscope Software
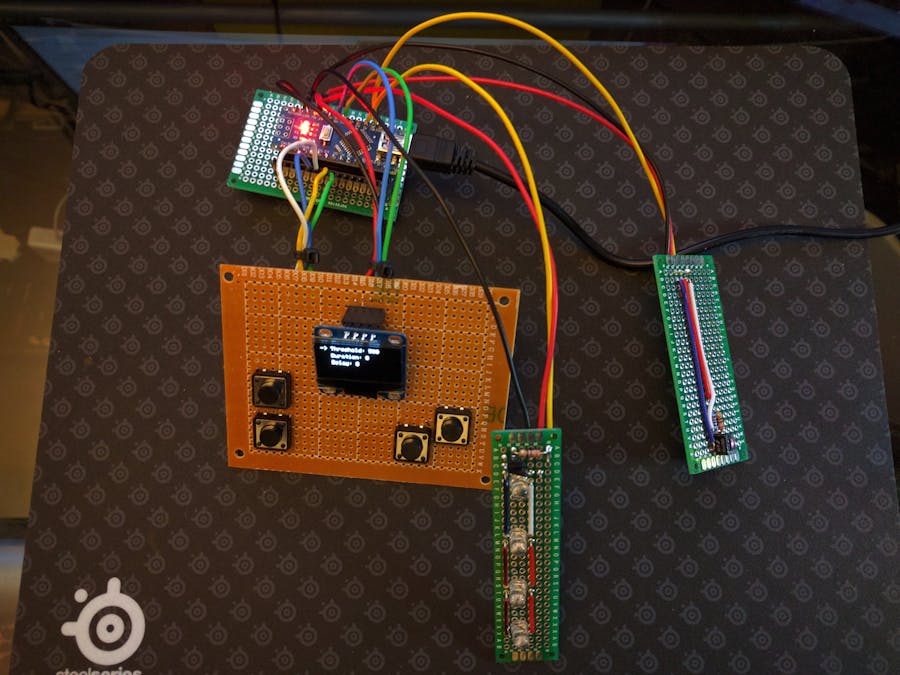
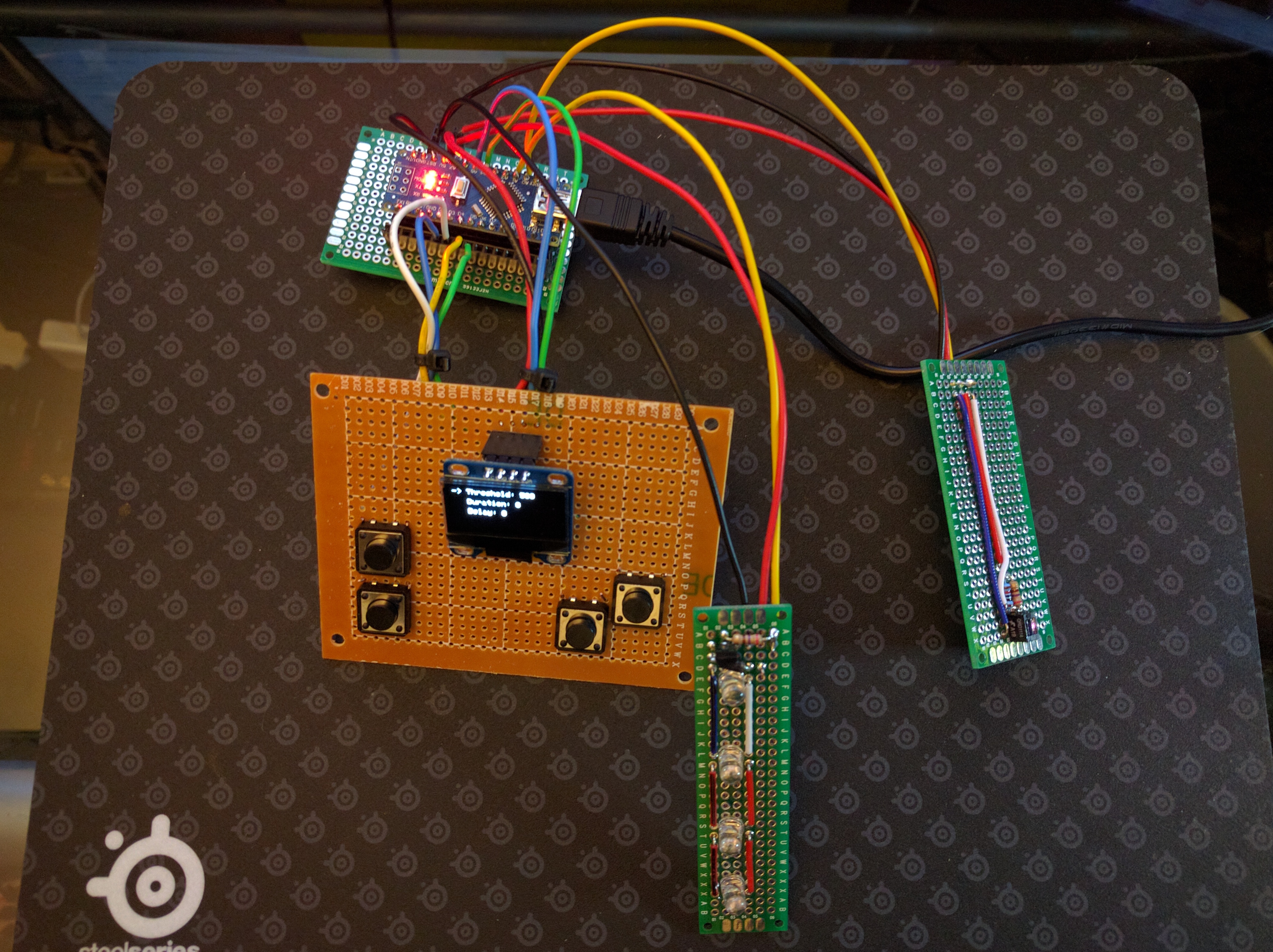
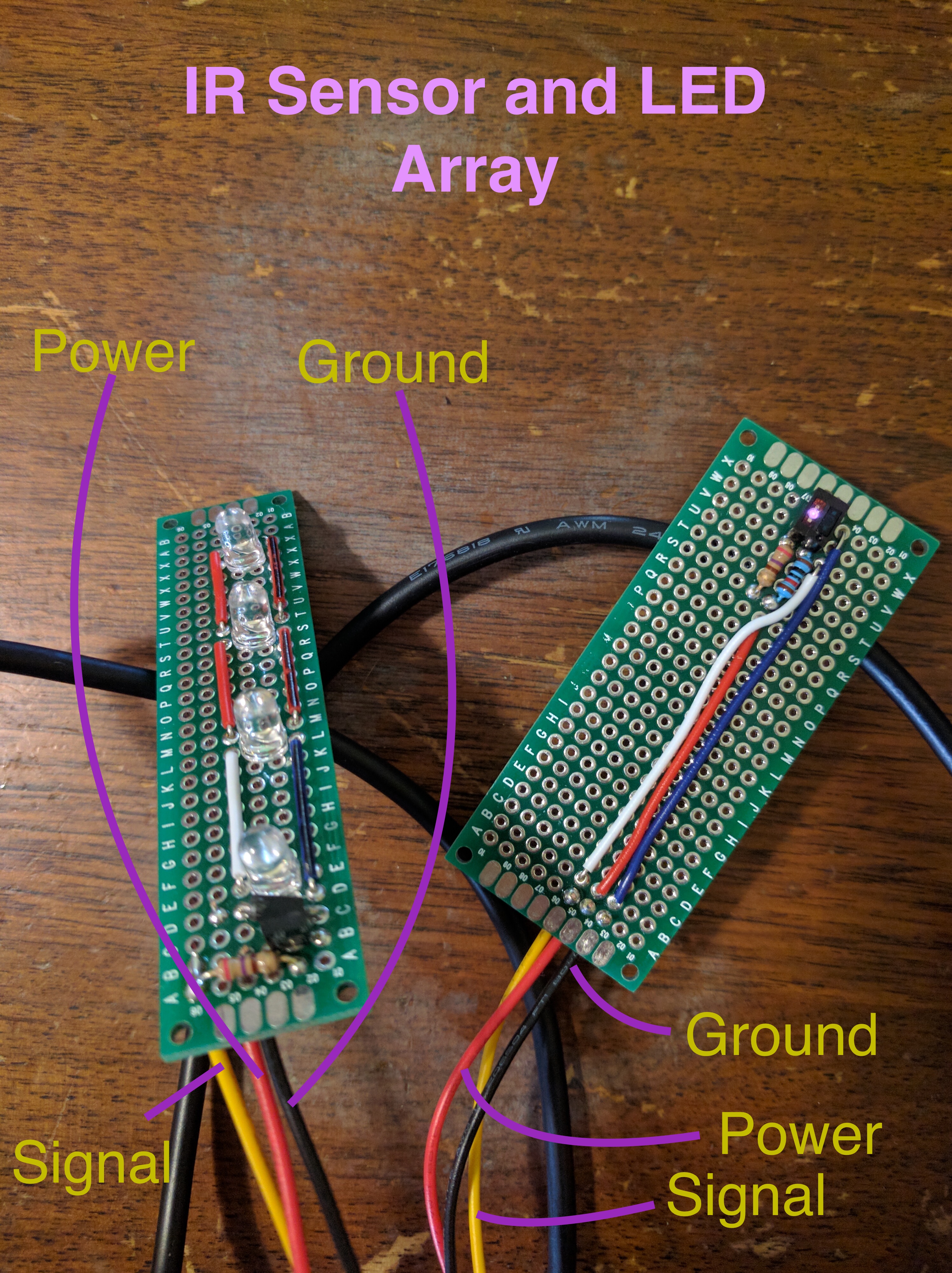
ArduinoThis software controls a stroboscope which is triggered by an ir sensor. The duration, delay, and trigger threshold can all be controlled using an oled display. Code is messy.
// libraries for screen
#include <SPI.h>
#include <Wire.h>
#include <EEPROM.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
// create screen object
#define OLED_RESET 4
Adafruit_SSD1306 display(OLED_RESET);
// pin layout
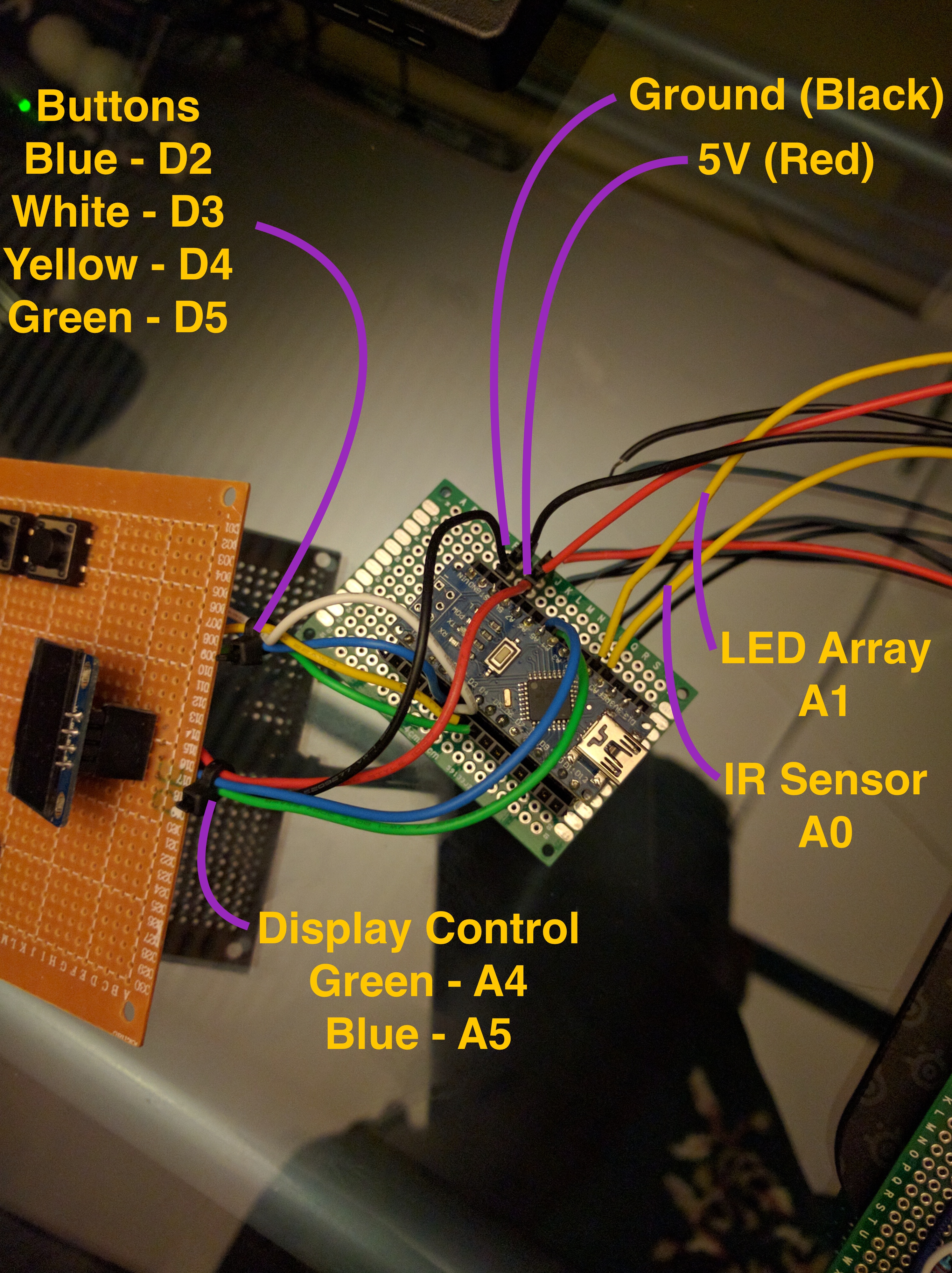
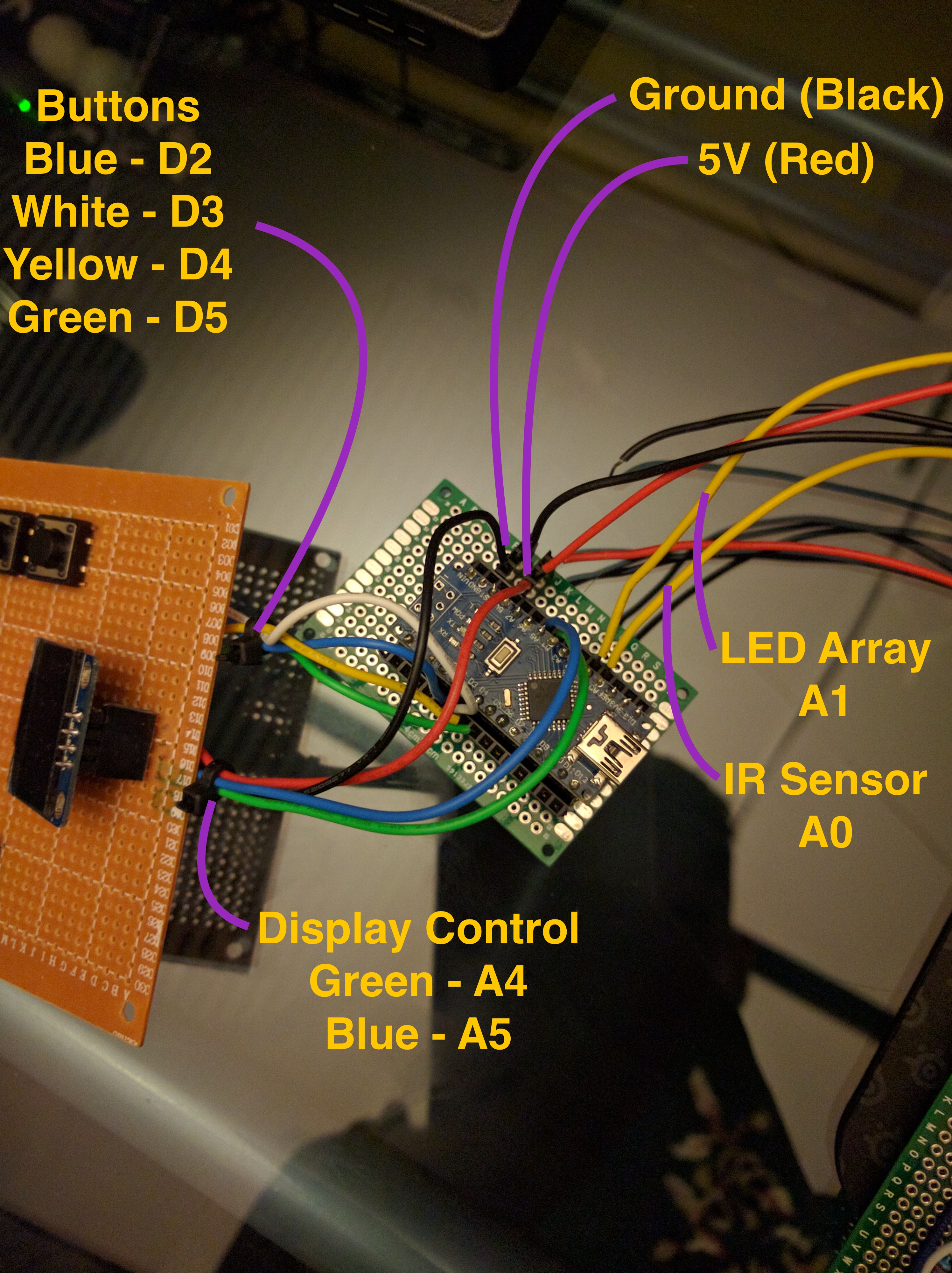
const int ledPin = 15;
const int pushButton1 = 2;
const int pushButton2 = 3;
const int pushButton3 = 4;
const int pushButton4 = 5;
// other varibales
volatile int irInputVal = 0;
int irPin = 14;
int irThreshold = EEPROM.get(10, irThreshold);
long ledDuration = EEPROM.get(20, ledDuration);
int ledDurationCount = 0;
int ledDelay = EEPROM.get(30, ledDelay);
volatile int ledDelayCount = 0;
int buttonCounter1 = 0;
int buttonCounter2 = 0;
int buttonCounter3 = 0;
int buttonCounter4 = 0;
volatile int trigger = 0;
volatile int triggerHistory = 0;
// for IR sensor
int ledTrigger = 0;
volatile int ledDelayTemp = 0;
volatile long ledDurationTemp = 0;
// use these to see if we need to update the screen
// we don't do this all the time because it is an expensive operation
int oldVariableSum = 0;
int variableSum = 0;
//
int screenState = 0;
void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
pinMode(pushButton1, INPUT_PULLUP);
pinMode(pushButton2, INPUT_PULLUP);
pinMode(pushButton3, INPUT_PULLUP);
pinMode(pushButton4, INPUT_PULLUP);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
display.clearDisplay();
splashscreen();
updatedisplay();
digitalWrite(ledPin, LOW);
OCR0A = 0xAF;
TIMSK0 |= _BV(OCIE0A);
}
void loop() {
int pushButton1Val = digitalRead(pushButton1);
int pushButton2Val = digitalRead(pushButton2);
int pushButton3Val = digitalRead(pushButton3);
int pushButton4Val = digitalRead(pushButton4);
if(ledDelayTemp > 0) {
ledDelayTemp = ledDelayTemp - 1;
} else if (ledDurationTemp > 0){
ledDurationTemp = ledDurationTemp - 1;
digitalWrite(ledPin,HIGH);
} else {
digitalWrite(ledPin,LOW);
}
// button 1 *************************************************
if (pushButton1Val == LOW) {
buttonCounter1 = buttonCounter1 + 1;
} else {
buttonCounter1 = 0;
}
if (buttonCounter1 > 5000) {
buttonCounter1 = 0;
// increment variable
if (screenState < 2) {
screenState = screenState + 1;
} else {
screenState = 0;
}
}
//// button 2 *************************************************
if (pushButton2Val == LOW) {
buttonCounter2 = buttonCounter2 + 1;
} else {
buttonCounter2 = 0;
}
if (buttonCounter2 > 5000) {
buttonCounter2 = 0;
// increment variable
if (screenState > 0) {
screenState = screenState - 1;
} else {
screenState = 2;
}
}
//// button 3 *************************************************
if (pushButton3Val == LOW) {
buttonCounter3 = buttonCounter3 + 1;
} else {
buttonCounter3 = 0;
}
if (buttonCounter3 > 2000) {
buttonCounter3 = 0;
// increment variable
switch (screenState) {
case 0:
irThreshold = irThreshold - 10;
break;
case 1:
ledDuration = ledDuration - 100;
break;
case 2:
ledDelay = ledDelay - 100;
break;
}
}
//// button 4 *************************************************
if (pushButton4Val == LOW) {
buttonCounter4 = buttonCounter4 + 1;
} else {
buttonCounter4 = 0;
}
if (buttonCounter4 > 2000) {
buttonCounter4 = 0;
// increment variable
switch (screenState) {
case 0:
irThreshold = irThreshold + 10;
break;
case 1:
ledDuration = ledDuration + 100;
break;
case 2:
ledDelay = ledDelay + 100;
break;
}
}
// end buttons
// bounds for variables
if(irThreshold < 0){
irThreshold = 0;
} else if (irThreshold > 1020){
irThreshold = 1020;
}
if(ledDuration < 0){
ledDuration = 0;
} else if (ledDuration > 20000){
ledDuration = 20000;
}
if(ledDelay < 0){
ledDelay = 0;
} else if (ledDelay > 20000){
ledDelay = 20000;
}
variableSum = irThreshold + ledDuration + ledDelay + screenState;
if (variableSum != oldVariableSum) {
updatedisplay();
EEPROM.put(10, irThreshold);
EEPROM.put(20, ledDuration);
EEPROM.put(30, ledDelay);
}
oldVariableSum = variableSum;
}
//***************************************//
// Funcitons
//***************************************//
SIGNAL(TIMER0_COMPA_vect) {
irInputVal = analogRead(irPin);
if (irInputVal < irThreshold && triggerHistory == 0){
trigger = 1;
}
if(irInputVal < irThreshold && ledDurationTemp == 0 && trigger == 1) {
ledDelayTemp = ledDelay;
ledDurationTemp = ledDuration;
trigger = 0;
}
if (irInputVal < irThreshold) {
triggerHistory = 1;
} else {
triggerHistory = 0;
}
}
void splashscreen(){
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.println("Problems?");
display.setTextSize(1);
display.println("");
display.setTextSize(2);
display.println("Contact:");
display.setTextSize(1);
display.println("");
display.println("harlenbains@ieee.org");
display.display();
delay(3000);
display.clearDisplay();
}
void updatedisplay(){
switch (screenState){
case 0:
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.print("-> Threshold: ");
display.println(irThreshold);
display.println("");
display.print(" Duration: ");
display.println(ledDuration);
display.println("");
display.print(" Delay: ");
display.println(ledDelay);
display.println("");
display.display();
display.clearDisplay();
break;
case 1:
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.print(" Threshold: ");
display.println(irThreshold);
display.println("");
display.print("-> Duration: ");
display.println(ledDuration);
display.println("");
display.print(" Delay: ");
display.println(ledDelay);
display.println("");
display.display();
display.clearDisplay();
break;
case 2:
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.print(" Threshold: ");
display.println(irThreshold);
display.println("");
display.print(" Duration: ");
display.println(ledDuration);
display.println("");
display.print("-> Delay: ");
display.println(ledDelay);
display.println("");
display.display();
display.clearDisplay();
break;
}
}




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments