// This #include statement was automatically added by the Particle IDE.
#include "Adafruit_SSD1306/Adafruit_SSD1306.h"
#include"application.h"
#include"math.h"
#define IR_PORT A0
// use hardware SPI,so only need to config DataCommand, ChipSelect, Reset Pins
//#define OLED_MOSI A5 //DI
//#define OLED0_MISO A4
//#define OLED_SCK A3 //DO
#define OLED_CS A2
#define OLED_DC A1
#define OLED_RESET D0
Adafruit_SSD1306 oled(OLED_DC, OLED_RESET, OLED_CS);
SYSTEM_MODE(SEMI_AUTOMATIC);
unsigned char distance =10;
unsigned char max_distance = 0;
unsigned char min_distance = 100;
unsigned char algorithm_sensor()
{
unsigned int sensorValue = 0;
unsigned int value = 0;
float analog=0.0;
float temp=0.0;
sensorValue = analogRead(IR_PORT);
analog = (sensorValue/4095.0)*3.3;
//get this algorithm from sparkfun web,but seems not very good,
//a better method should be premeasure the adc value at each distance and then use the EXCEL to find out a pow algorithm
//with good parameter.
temp = 306.439 + analog*( -512.611 + analog*(382.268 +analog*(-129.893 + analog*16.2537) ) );
distance = int(round(temp));
Serial.print(distance);
Serial.print("\r\n");
}
void setup() {
Serial.begin(9600);
oled.begin(SSD1306_SWITCHCAPVCC);
Serial.print("This is a demo project for distance sensor\r\n");
pinMode(IR_PORT,INPUT);
delay(2000);
// miniature bitmap display
oled.display();
oled.clearDisplay();
oled.setTextSize(1);
oled.setTextColor(WHITE);
oled.setCursor(0,0);
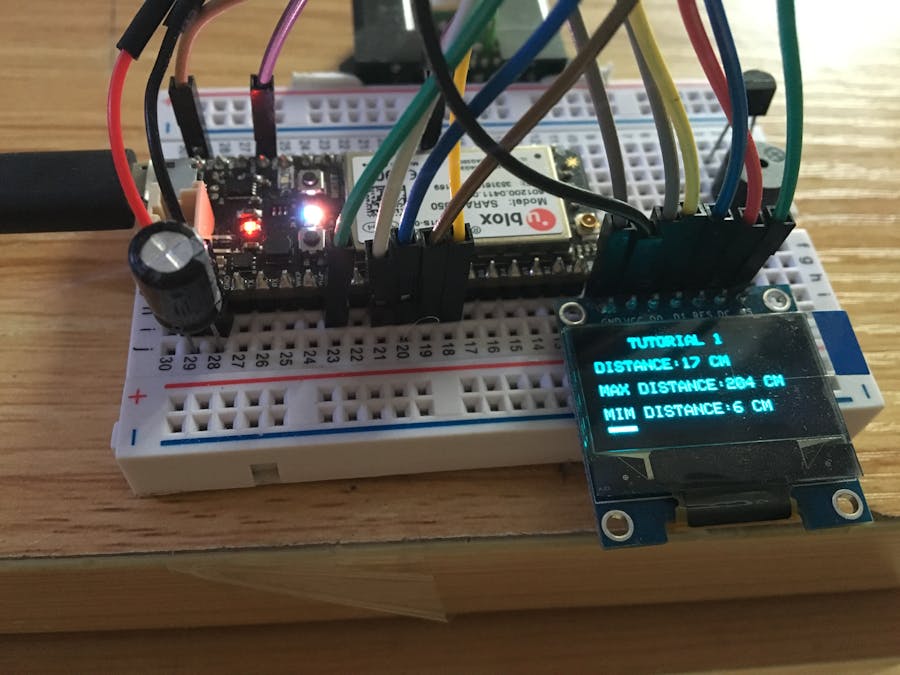
oled.println(" TUTORIAL 1"); //the first line
oled.println(""); //do nothing here,just to leave one space line
oled.print("DISTANCE:"); //the second line
oled.print(distance, DEC);
oled.println(" CM");
oled.println(""); //do nothing here,just to leave one space line
oled.print("MAX DISTANCE:"); //the third line
oled.print(distance, DEC);
oled.println(" CM");
oled.println(""); //do nothing here,just to leave one space line
oled.print("MIM DISTANCE:"); //the fourth line
oled.print(distance, DEC);
oled.print(" CM");
oled.display();
}
void loop() {
delay(500); //update the distance value every 500ms
algorithm_sensor();
if(distance>max_distance) //get the maximum distance
max_distance = distance;
if(distance<min_distance) //get the minimum distance
min_distance = distance;
oled.clearDisplay();
oled.setCursor(0,0); //need to set the original cursor for every loop;
oled.println(" TUTORIAL 1"); //the first line
oled.println(""); //do nothing here,just to leave one space line
oled.print("DISTANCE:"); //the second line
oled.print(distance, DEC);
oled.println(" CM");
oled.println(""); //do nothing here,just to leave one space line
oled.print("MAX DISTANCE:"); //the third line
oled.print(max_distance, DEC);
oled.println(" CM");
oled.println(""); //do nothing here,just to leave one space line
oled.print("MIM DISTANCE:"); //the fourth line
oled.print(min_distance, DEC);
oled.print(" CM");
if(distance>127)
distance = 127;
oled.fillRect(0,60,distance,3,WHITE); //drawing the distance table.
oled.display();
distance++;
if(distance==100)
distance = 0;
}







Comments