


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
This instructable video is all about how to monitor the Quality of water, interns of monitoring the level of water, the temperature of the water and its surrounding, the turbidity of the water (how clean the water is) as well as the PH levels of the Water. So this system monitors all of these aspect and finally when all check have been completed, its sends the information or data as an SMS to notify the authorized personnel.
Step 1: Components NeededFor you to be able to complete this project you need to get these specific kind of devices.
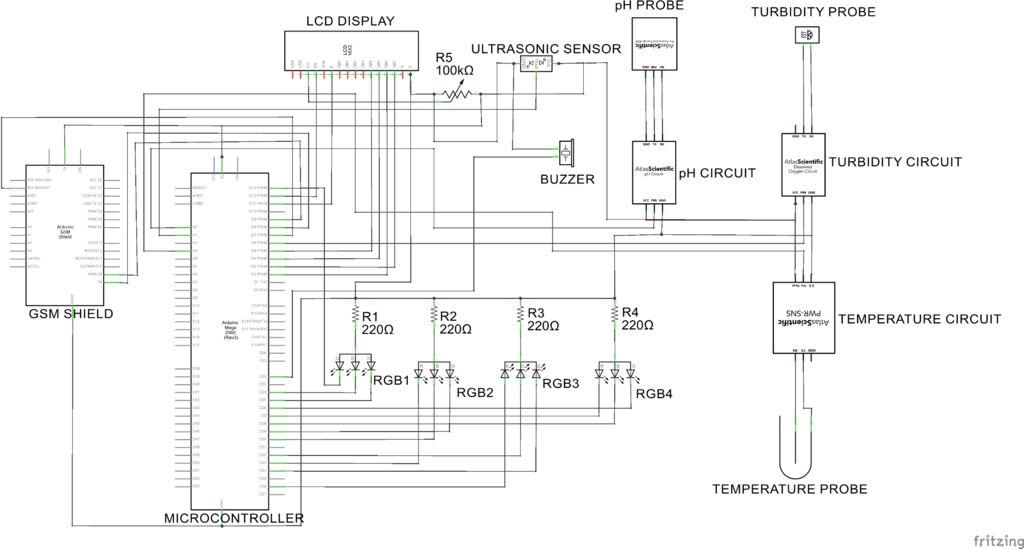
1. Arduino Mega Board.
2. (16 * 2) LCD display.
3. The 2 in one Temperature and PH sensor.
4. The Turrbidity Sensor.
5. A GSM shield.
6. An ultrasonic Sensor.
7. 4 RGB led.
8. A buzzer.
Step 2: Graphical View and Circuit DiagramAttached are the circuit diagram and the Fritzing view of the project.
Step 3: The Arduino Code and Library UsedAttached are the whole code for the Project and the library used to run the Code.
And checkout my blog for more info here: https://learnwitani.blogspot.com/2020/12/waterqaulitymonitoring.html
Water Quality Monitoring and Notification System Using Arduino Based GSM System Code
C/C++#include <OneWire.h>
#include <DallasTemperature.h>
#include <SoftwareSerial.h>
#include <NewPing.h>
#define SensorPin A2 //pH meter Analog output to Arduino Analog Input 0
#define Offset 0.00 //deviation compensate
unsigned long int avgValue; //Store the average value of the sensor feedback
#define TRIGGER_PIN 23 // Arduino pin tied to trigger pin on ping sensor.
#define ECHO_PIN 22 // Arduino pin tied to echo pin on ping sensor.
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
unsigned int pingSpeed = 50; // How frequently are we going to send out a ping (in milliseconds). 50ms would be 20 times a second.
unsigned long pingTimer; // Holds the next ping time.
// Data wire is plugged into pin 2 on the Arduino
#define ONE_WIRE_BUS 6
SoftwareSerial mySerial(7, 8);
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
//const int pingPin =22;
int sensorPin = A0;
int blueled = 13;
int redled = 24;
int greenled = 25;
int tempblueled = 32;
int tempredled = 33;
int tempgreenled = 34;
int levblueled = 35;
int levredled = 36;
int levgreenled = 37;
int turbblueled = 38;
int turbredled = 39;
int turbgreenled = 40;
int buzzer = 31;
float phValue;
float temperatureC;
long duration, cm;
void setup(void)
{
// start serial port
Serial.begin(9600);
pingTimer = millis(); // Start now.
// Start up the library
sensors.begin(); // IC Default 9 bit. If you have troubles consider upping it 12. Ups the delay giving the IC more time to process the temperature measurement
lcd.begin(16, 2); //initilise lcd with num of coloums 16 ,by row 2.
lcd.clear(); //clears lcd just incase there is anytin been displayed
pinMode(blueled, OUTPUT);
pinMode(redled, OUTPUT);
pinMode(greenled, OUTPUT);
pinMode(tempblueled, OUTPUT);
pinMode(tempredled, OUTPUT);
pinMode(tempgreenled, OUTPUT);
pinMode(levblueled, OUTPUT);
pinMode(levredled, OUTPUT);
pinMode(levgreenled, OUTPUT);
pinMode(turbblueled, OUTPUT);
pinMode(turbredled, OUTPUT);
pinMode(turbgreenled, OUTPUT);
pinMode(buzzer, OUTPUT);
digitalWrite(buzzer, LOW);
//initialization();
}
void loop() {
sensors.requestTemperatures(); // Send the command to get temperature
Serial.println(sensors.getTempCByIndex(0));
int reading = analogRead(sensorPin);
// converting that reading to voltage,
float voltage = reading * 5.0;
voltage /= 1024.0;
// now print out the temperature
float temperatureC = (voltage - 0.5) * 100 ;
PH();
digitalWrite(blueled, LOW);
digitalWrite(redled, LOW);
digitalWrite(greenled, LOW);
temperature ();
digitalWrite(tempblueled, LOW);
digitalWrite(tempredled, LOW);
digitalWrite(tempgreenled, LOW);
Water_level();
digitalWrite(levblueled, LOW);
digitalWrite(levredled, LOW);
digitalWrite(levgreenled, LOW);
turbidity();
digitalWrite(turbblueled, LOW);
digitalWrite(turbredled, LOW);
digitalWrite(turbgreenled, LOW);
send_sms();
delay(4000);
send_sms1();
digitalWrite(greenled, LOW);
digitalWrite(tempgreenled, LOW);
digitalWrite(levgreenled, LOW);
digitalWrite(turbgreenled, LOW);
delay(8000);
}
//////////////////////////////////////////////////////////// FUNCTIONS ////////////////////////////////////////////////////////////////////
void PH(){
Serial.println(" ");
lcd.clear( );
digitalWrite(blueled, LOW);
digitalWrite(greenled, LOW);
digitalWrite(redled, LOW);
digitalWrite(buzzer, LOW);
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("TAKING READINGS");
lcd.setCursor(1,1);
lcd.print("FROM PH SENSOR");
Serial.println("Taking Readings from PH Sensor");
PHblink();
int buf[10]; //buffer for read analog
for(int i=0;i<10;i++) //Get 10 sample value from the sensor for smooth the value
{
buf[i]=analogRead(SensorPin);
delay(10);
}
for(int i=0;i<9;i++) //sort the analog from small to large
{
for(int j=i+1;j<10;j++)
{
if(buf[i]>buf[j])
{
int temp=buf[i];
buf[i]=buf[j];
buf[j]=temp;
}
}
}
avgValue=0;
for(int i=2;i<8;i++) //take the average value of 6 center sample
avgValue+=buf[i];
float phValue=(float)avgValue*3.8/1030/6; //convert the analog into millivolt
phValue=3.3*phValue+Offset; //convert the millivolt into pH value
Serial.print("pH:");
Serial.print(phValue,2);
Serial.println(" ");
if(phValue >= 7.30){
lcd.clear();
digitalWrite(blueled, LOW);
digitalWrite(greenled, LOW);
digitalWrite(redled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.setCursor(1,0);//set cursor (colum by row) indexing from 0
lcd.print("PH VALUE:");
lcd.setCursor(10,0);
lcd.print(phValue);
lcd.setCursor(0,1);
Serial.print("PH VALUE: ");
Serial.println(phValue);
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("ALKALINITY HIGH");
Serial.println("Water Alkalinity high");
delay(3000);
}
if(phValue >= 6.90 && phValue <= 7.19){
digitalWrite(blueled, HIGH);
digitalWrite(greenled,LOW);
digitalWrite(redled, LOW);
digitalWrite(buzzer, LOW);
lcd.clear();
lcd.setCursor(1,0);//set cursor (colum by row) indexing from 0
lcd.print("PH VALUE:");
lcd.setCursor(10,0);
lcd.print(phValue);
lcd.setCursor(0,1);
Serial.print("PH VALUE: ");
Serial.println(phValue);
lcd.setCursor(1,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER IS SAFE");
Serial.println("Water Is neutral (safe)");
}
if(phValue < 6.89){
lcd.clear();
digitalWrite(blueled, LOW);
digitalWrite(greenled, LOW);
digitalWrite(redled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.setCursor(1,0);//set cursor (colum by row) indexing from 0
lcd.print("PH VALUE:");
lcd.setCursor(10,0);
lcd.print(phValue);
lcd.setCursor(0,1);
Serial.print("PH VALUE: ");
Serial.println(phValue);
lcd.setCursor(2,1);//set cursor (colum by row) indexing from 0
lcd.print("ACIDITY HIGH");
Serial.println("Water Acidity High");
delay(3000);
}
delay(8000);
}
void temperature (){
Serial.println(" ");
lcd.clear( );
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("TAKING READINGS");
lcd.setCursor(0,1);
lcd.print("FROM TEMP SENSOR");
Serial.println("Taking Readings from Temperature Sensor");
TEMPblink();
temp_check_surr();
delay(4000);
temp_check_water();
}
void temp_check_surr(){
digitalWrite(tempblueled, LOW);
digitalWrite(tempgreenled, LOW);
digitalWrite(tempredled, LOW);
digitalWrite(buzzer, LOW);
int reading = analogRead(sensorPin);
// converting that reading to voltage,
float voltage = reading * 5.0;
voltage /= 1024.0;
// now print out the temperature
float temperatureC = (voltage - 0.5) * 100 ; //converting from 10 mv per degree wit 500 mV offset
//to degrees ((voltage - 500mV) times 100)
lcd.clear();
Serial.print("Surrounding Temperature: ");
Serial.println(temperatureC);
if(temperatureC > 50){
digitalWrite(tempblueled, LOW);
digitalWrite(tempgreenled, LOW);
digitalWrite(tempredled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("SUR TEMP:");
lcd.setCursor(9,0);
lcd.print(temperatureC);
lcd.setCursor(14,0);
lcd.print("*C");
lcd.setCursor(0,1);
Serial.print("Surrounding Temperature: ");
Serial.print(temperatureC);
Serial.println(" degree C");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("SURR TEMP HIGH");
Serial.println("Surrounding Temperature high");
delay(3000);
}
if(temperatureC >= 10 && temperatureC <= 50){
digitalWrite(tempblueled, HIGH);
digitalWrite(tempgreenled,LOW);
digitalWrite(tempredled, LOW);
digitalWrite(buzzer, LOW);
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("SUR TEMP:");
lcd.setCursor(9,0);
lcd.print(temperatureC);
lcd.setCursor(14,0);
lcd.print("*C");
lcd.setCursor(0,1);
Serial.print("Surrounding Temperature: ");
Serial.print(temperatureC);
Serial.println(" degree C");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("SURR TEMP NORMAL");
Serial.println("Surrounding Temperature normal");
}
if(temperatureC < 10){
digitalWrite(tempblueled, LOW);
digitalWrite(tempgreenled, LOW);
digitalWrite(tempredled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("SUR TEMP:");
lcd.setCursor(9,0);
lcd.print(temperatureC);
lcd.setCursor(14,0);
lcd.print("*C");
lcd.setCursor(0,1);
Serial.print("Surrounding Temperature: ");
Serial.print(temperatureC);
Serial.println(" degree C");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("SURR TEMP LOW");
Serial.println("Surrounding Temperature low");
delay(3000);
}
delay(8000);
}
void temp_check_water(){
lcd.clear();
digitalWrite(tempblueled, LOW);
digitalWrite(tempgreenled, LOW);
digitalWrite(tempredled, LOW);
digitalWrite(buzzer, LOW);
sensors.requestTemperatures(); // Send the command to get temperature
Serial.print("Water Temperature: ");
Serial.println(sensors.getTempCByIndex(0));
if(sensors.getTempCByIndex(0) > 40){
digitalWrite(tempblueled, LOW);
digitalWrite(tempgreenled, LOW);
digitalWrite(tempredled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("WAT TEMP:");
lcd.setCursor(9,0);
lcd.print(sensors.getTempCByIndex(0));
lcd.setCursor(14,0);
lcd.print("*C");
lcd.setCursor(0,1);
Serial.print("Water Temperature: ");
Serial.print(sensors.getTempCByIndex(0));
Serial.println(" degree C");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER TEMP HIGH");
Serial.println("Water Temperature high");
delay(3000);
}
if(sensors.getTempCByIndex(0) >= 15 && sensors.getTempCByIndex(0) <= 40){
digitalWrite(tempblueled, HIGH);
digitalWrite(tempgreenled,LOW);
digitalWrite(tempredled, LOW);
digitalWrite(buzzer, LOW);
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("WAT TEMP:");
lcd.setCursor(9,0);
lcd.print(sensors.getTempCByIndex(0));
lcd.setCursor(14,0);
lcd.print("*C");
lcd.setCursor(0,1);
Serial.print("Water Temperature: ");
Serial.print(sensors.getTempCByIndex(0));
Serial.println(" degree C");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER TEMP NORMAL");
Serial.println("Water Temperature normal");
}
if(sensors.getTempCByIndex(0) < 15){
digitalWrite(tempblueled, LOW);
digitalWrite(tempgreenled, LOW);
digitalWrite(tempredled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("WAT TEMP:");
lcd.setCursor(9,0);
lcd.print(sensors.getTempCByIndex(0));
lcd.setCursor(14,0);
lcd.print("*C");
lcd.setCursor(0,1);
Serial.print("Water Temperature: ");
Serial.print(sensors.getTempCByIndex(0));
Serial.println(" degree C");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER TEMP LOW");
Serial.println("Water Temperature low");
delay(3000);
}
delay(8000);
}
void Water_level() {
Serial.println(" ");
digitalWrite(levblueled, LOW);
digitalWrite(levgreenled, LOW);
digitalWrite(levredled, LOW);
digitalWrite(buzzer, LOW);
lcd.clear( );
lcd.setCursor(2,0);//set cursor (colum by row) indexing from 0
lcd.print("READINGS FROM");
lcd.setCursor(0,1);
lcd.print("WATER LEVEL SENS");
Serial.println("Taking Readings from Water Level Sensor");
LEVblink();
level_check();
delay(8000);
}
void level_check(){
digitalWrite(levblueled, LOW);
digitalWrite(levgreenled, LOW);
digitalWrite(levredled, LOW);
digitalWrite(buzzer, LOW);
// Notice how there's no delays in this sketch to allow you to do other processing in-line while doing distance pings.
if (millis() >= pingTimer) { // pingSpeed milliseconds since last ping, do another ping.
pingTimer += pingSpeed; // Set the next ping time.
sonar.ping_timer(echoCheck); // Send out the ping, calls "echoCheck" function every 24uS where you can check the ping status.
//delay(1000);
}
}
void echoCheck() { // Timer2 interrupt calls this function every 24uS where you can check the ping status.
// Don't do anything here!
if (sonar.check_timer()) { // This is how you check to see if the ping was received.
if(sonar.ping_result / US_ROUNDTRIP_CM > 7){
digitalWrite(levblueled, LOW);
digitalWrite(levgreenled, LOW);
digitalWrite(levredled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.clear( );
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("WATER LEVEL:");
lcd.setCursor(12,0);
lcd.print(sonar.ping_result / US_ROUNDTRIP_CM);
lcd.setCursor(14,0);
lcd.print("cm");
lcd.setCursor(0,1);
Serial.print("Water Level: ");
Serial.print(sonar.ping_result / US_ROUNDTRIP_CM);
Serial.println("cm");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER LEVEL LOW");
Serial.println("Water Level low");
delay(3000);
}
if(sonar.ping_result / US_ROUNDTRIP_CM >= 5 && sonar.ping_result / US_ROUNDTRIP_CM <= 7){
digitalWrite(levblueled, HIGH);
digitalWrite(levgreenled, LOW);
digitalWrite(levredled, LOW);
digitalWrite(buzzer, LOW);
lcd.clear( );
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("WATER LEVEL:");
lcd.setCursor(12,0);
lcd.print(sonar.ping_result / US_ROUNDTRIP_CM);
lcd.setCursor(14,0);
lcd.print("cm");
lcd.setCursor(0,1);
Serial.print("Water Level: ");
Serial.print(sonar.ping_result / US_ROUNDTRIP_CM);
Serial.println("cm");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER LEVEL NORMAL");
Serial.println("Water Level normal");
}
if(sonar.ping_result / US_ROUNDTRIP_CM < 5){
digitalWrite(levblueled, LOW);
digitalWrite(levgreenled, LOW);
digitalWrite(levredled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.clear( );
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("WATER LEVEL:");
lcd.setCursor(12,0);
lcd.print(sonar.ping_result / US_ROUNDTRIP_CM);
lcd.setCursor(14,0);
lcd.print("cm");
lcd.setCursor(0,1);
Serial.print("Water Level: ");
Serial.print(sonar.ping_result / US_ROUNDTRIP_CM);
Serial.println("cm");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER LEVEL HIGH");
Serial.println("Water Level high");
delay(2000);
}
}
}
/*long microsecondsToCentimeters(long microseconds)
{
return microseconds / 29 / 2;
}
*/
void turbidity() {
Serial.println(" ");
digitalWrite(turbblueled, LOW);
digitalWrite(turbgreenled, LOW);
digitalWrite(turbredled, LOW);
digitalWrite(buzzer, LOW);
lcd.clear( );
lcd.setCursor(1,0);//set cursor (colum by row) indexing from 0
lcd.print("READINGS FROM");
lcd.setCursor(0,1);
lcd.print("TURBIDITY SENSOR");
Serial.println("Taking Readings from turbidity Sensor");
TURBblink();
int turbidityValue = analogRead(A1);
float turbidityV = turbidityValue/100;
Serial.print("Turbidity level: ");
Serial.println(turbidityV);
if( turbidityV > 9){
digitalWrite(turbblueled, LOW);
digitalWrite(turbgreenled, LOW);
digitalWrite(turbredled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.clear( );
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("TURBI LEV:");
lcd.setCursor(11,0);
lcd.print(turbidityV);
lcd.setCursor(14,0);
lcd.print("NTU");
lcd.setCursor(0,1);
Serial.print("Turbidity Level: ");
Serial.print(turbidityV);
Serial.println("NTU");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER VERY CLEAN");
Serial.println("Water Very Clean ");
delay(3000);
}
if( turbidityV >= 6 && turbidityValue/100 <= 9 ){
digitalWrite(turbblueled, HIGH);
digitalWrite(turbgreenled, LOW);
digitalWrite(turbredled, LOW);
digitalWrite(buzzer, LOW);
lcd.clear( );
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("TURBI LEV:");
lcd.setCursor(10,0);
lcd.print(turbidityV);
lcd.setCursor(13,0);
lcd.print("NTU");
lcd.setCursor(0,1);
Serial.print("Turbidity Level: ");
Serial.print(turbidityV);
Serial.println("NTU");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER NORM CLEAN");
Serial.println("Water Clean ");
}
if( turbidityV < 6){
digitalWrite(turbblueled, LOW);
digitalWrite(turbgreenled, LOW);
digitalWrite(turbredled, HIGH);
digitalWrite(buzzer, HIGH);
lcd.clear( );
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("TURBI LEV:");
lcd.setCursor(11,0);
lcd.print(turbidityV);
lcd.setCursor(14,0);
lcd.print("NTU");
lcd.setCursor(0,1);
Serial.print("Turbidity Level: ");
Serial.print(turbidityV);
Serial.println("NTU");
lcd.setCursor(0,1);//set cursor (colum by row) indexing from 0
lcd.print("WATER VERY DIRTY");
Serial.println("Water Very Dirty ");
delay(3000);
}
delay (8000);
}
void initialization(){
lcd.setCursor(0,0);//set cursor (colum by row) indexing from 0
lcd.print("INITIALIZING ALL");
lcd.setCursor(0,1);
lcd.print("PARAMETERS");
delay(3000);
lcd.setCursor(0,1);
lcd.print("PARAMETERS.");
delay(3000);
lcd.setCursor(0,1);
lcd.print("PARAMETERS..");
delay(3000);
lcd.setCursor(0,1);
lcd.print("PARAMETERS...");
delay(3000);
lcd.setCursor(0,1);
lcd.print("PARAMETERS....");
delay(3000);
lcd.setCursor(0,1);
lcd.print("PARAMETERS.....");
delay(3000);
lcd.setCursor(0,1);
lcd.print("PARAMETERS......");
Serial.println("Initializing All Parameters........");
delay(8000);
Serial.println("Initializing Done.");
lcd.clear();
lcd.setCursor(1,0);
lcd.print("INITIALIZATION");
lcd.setCursor(6,1);
lcd.print("DONE ");
delay(2000);
}
//////////////////////////////////////////////////////// SMS FUNCTION /////////////////////////////////////////////////////////////////////
void send_sms(){
lcd.clear();
lcd.setCursor(2,0);//set cursor (colum by row) indexing from 0
lcd.print("ATTENTION!!! ");
lcd.setCursor(2,1);
lcd.print("SENDING SMS ");
String temp;
String lev;
String phm;
String turb;
int turbidityValue = analogRead(A1);
float turbidityV = turbidityValue/100;
int buf[10]; //buffer for read analog
for(int i=0;i<10;i++) //Get 10 sample value from the sensor for smooth the value
{
buf[i]=analogRead(SensorPin);
delay(10);
}
for(int i=0;i<9;i++) //sort the analog from small to large
{
for(int j=i+1;j<10;j++)
{
if(buf[i]>buf[j])
{
int temp=buf[i];
buf[i]=buf[j];
buf[j]=temp;
}
}
}
avgValue=0;
for(int i=2;i<8;i++) //take the average value of 6 center sample
avgValue+=buf[i];
float phValue=(float)avgValue*3.8/1030/6; //convert the analog into millivolt
phValue=3.3*phValue+Offset;
if(sensors.getTempCByIndex(0) > 40){
temp = String("HIGH");
}
if(sensors.getTempCByIndex(0) >= 10 && sensors.getTempCByIndex(0) <= 40){
temp = String("NORMAL");
}
if(sensors.getTempCByIndex(0) < 10){
temp = String("LOW");
}
if(sonar.ping_result / US_ROUNDTRIP_CM > 8){
lev = String("LOW");
}
if(sonar.ping_result / US_ROUNDTRIP_CM >= 5 && sonar.ping_result / US_ROUNDTRIP_CM <= 8){
lev = String("NORMAL");
}
if(sonar.ping_result / US_ROUNDTRIP_CM < 5){
lev = String("HIGH");
}
if(phValue >= 7.30){
phm = String("ALKALINE");
}
if(phValue >= 6.90 && phValue <= 7.19){
phm = String("NORMAL");
}
if(phValue < 6.89){
phm = String("ACIDIC");
}
if(turbidityV >= 6 && turbidityValue/100 <= 9){
turb = String("CLEAN");
}
if(turbidityV < 6){
turb = String("DIRTY");
}
mySerial.begin(19200); //Default serial port setting for the GPRS modem is 19200bps 8-N-1
mySerial.print("\r");
digitalWrite(buzzer, LOW);
digitalWrite(blueled, LOW);
digitalWrite(greenled, LOW);
digitalWrite(redled, LOW);
delay(1000); //wait for a second while the modem sends an "OK"
mySerial.print("AT+CMGF=1\r"); //Because we want to send the SMS in text mode
delay(1000);
mySerial.print("AT+CMGS=\"+233540518223\"\r"); //Start accepting the text for the message
delay(1000);
mySerial.print(temp);
mySerial.print(" \r");
mySerial.print("WATER TEMPERATURE= \r"); //The text for the message
mySerial.print(sensors.getTempCByIndex(0));
mySerial.print("*C\r");
mySerial.println("\r");
mySerial.print(lev);
mySerial.print(" \r");
mySerial.print("WATER LEVEL= \r"); //The text for the message
mySerial.print(sonar.ping_result / US_ROUNDTRIP_CM);
mySerial.print("cm\r");
mySerial.println("\r");
mySerial.print(phm);
mySerial.print(" \r");
mySerial.print("WATER PH VALUE= \r"); //The text for the message
mySerial.print(phValue);
mySerial.println("\r");
mySerial.print(turb);
mySerial.print(" \r");
mySerial.print("WATER TURBIDITY= \r"); //The text for the message
mySerial.print(turbidityV);
mySerial.print("NBT\r");
digitalWrite(greenled, HIGH);
digitalWrite(tempgreenled, HIGH);
digitalWrite(levgreenled, HIGH);
digitalWrite(turbgreenled, HIGH);
delay(3000);
/*lcd.clear();
lcd.setCursor(5,0);//set cursor (colum by row) indexing from 0
lcd.print("SMS SENT ");
lcd.setCursor(2,1);
lcd.print("SUCCESSFULLY ");*/
mySerial.write(0x1A); //Equivalent to sending Ctrl+Z
}
void send_sms1(){
lcd.clear();
lcd.setCursor(2,0);//set cursor (colum by row) indexing from 0
lcd.print("ATTENTION!!! ");
lcd.setCursor(2,1);
lcd.print("SENDING SMS ");
String temp;
String lev;
String phm;
String turb;
int turbidityValue = analogRead(A1);
float turbidityV = turbidityValue/100;
int buf[10]; //buffer for read analog
for(int i=0;i<10;i++) //Get 10 sample value from the sensor for smooth the value
{
buf[i]=analogRead(SensorPin);
delay(10);
}
for(int i=0;i<9;i++) //sort the analog from small to large
{
for(int j=i+1;j<10;j++)
{
if(buf[i]>buf[j])
{
int temp=buf[i];
buf[i]=buf[j];
buf[j]=temp;
}
}
}
avgValue=0;
for(int i=2;i<8;i++) //take the average value of 6 center sample
avgValue+=buf[i];
float phValue=(float)avgValue*3.8/1030/6; //convert the analog into millivolt
phValue=3.3*phValue+Offset;
if(sensors.getTempCByIndex(0) > 40){
temp = String("HIGH");
}
if(sensors.getTempCByIndex(0) >= 10 && sensors.getTempCByIndex(0) <= 40){
temp = String("NORMAL");
}
if(sensors.getTempCByIndex(0) < 10){
temp = String("LOW");
}
if(sonar.ping_result / US_ROUNDTRIP_CM > 8){
lev = String("LOW");
}
if(sonar.ping_result / US_ROUNDTRIP_CM >= 5 && sonar.ping_result / US_ROUNDTRIP_CM <= 8){
lev = String("NORMAL");
}
if(sonar.ping_result / US_ROUNDTRIP_CM < 5){
lev = String("HIGH");
}
if(phValue >= 7.30){
phm = String("ALKALINE");
}
if(phValue >= 6.90 && phValue <= 7.19){
phm = String("NORMAL");
}
if(phValue < 6.89){
phm = String("ACIDIC");
}
if(turbidityV >= 6 && turbidityValue/100 <= 9){
turb = String("CLEAN");
}
if(turbidityV < 6){
turb = String("DIRTY");
}
mySerial.begin(19200); //Default serial port setting for the GPRS modem is 19200bps 8-N-1
mySerial.print("\r");
digitalWrite(buzzer, LOW);
digitalWrite(blueled, LOW);
digitalWrite(greenled, LOW);
digitalWrite(redled, LOW);
delay(1000); //wait for a second while the modem sends an "OK"
mySerial.print("AT+CMGF=1\r"); //Because we want to send the SMS in text mode
delay(1000);
mySerial.print("AT+CMGS=\"+233265188849\"\r"); //Start accepting the text for the message
delay(1000);
mySerial.print(temp);
mySerial.print(" \r");
mySerial.print("WATER TEMPERATURE= \r"); //The text for the message
mySerial.print(sensors.getTempCByIndex(0));
mySerial.print("*C\r");
mySerial.println("\r");
mySerial.print(lev);
mySerial.print(" \r");
mySerial.print("WATER LEVEL= \r"); //The text for the message
mySerial.print(sonar.ping_result / US_ROUNDTRIP_CM);
mySerial.print("cm\r");
mySerial.println("\r");
mySerial.print(phm);
mySerial.print(" \r");
mySerial.print("WATER PH VALUE= \r"); //The text for the message
mySerial.print(phValue);
mySerial.println("\r");
mySerial.print(turb);
mySerial.print(" \r");
mySerial.print("WATER TURBIDITY= \r"); //The text for the message
mySerial.print(turbidityV);
mySerial.print("NBT\r");
digitalWrite(greenled, HIGH);
digitalWrite(tempgreenled, HIGH);
digitalWrite(levgreenled, HIGH);
digitalWrite(turbgreenled, HIGH);
delay(3000);
lcd.clear();
lcd.setCursor(5,0);//set cursor (colum by row) indexing from 0
lcd.print("SMS SENT ");
lcd.setCursor(2,1);
lcd.print("SUCCESSFULLY ");
mySerial.write(0x1A); //Equivalent to sending Ctrl+Z
}
void PHblink() {
digitalWrite(blueled, HIGH);
delay(1000);
digitalWrite(blueled, LOW);
delay(1000);
digitalWrite(blueled, HIGH);
delay(1000);
digitalWrite(blueled, LOW);
delay(1000);
digitalWrite(blueled, HIGH);
delay(1000);
digitalWrite(blueled, LOW);
delay(1000);
digitalWrite(blueled, HIGH);
delay(1000);
digitalWrite(blueled, LOW);
delay(1000);
}
void TEMPblink() {
digitalWrite(tempblueled, HIGH);
delay(1000);
digitalWrite(tempblueled, LOW);
delay(1000);
digitalWrite(tempblueled, HIGH);
delay(1000);
digitalWrite(tempblueled, LOW);
delay(1000);
digitalWrite(tempblueled, HIGH);
delay(1000);
digitalWrite(tempblueled, LOW);
delay(1000);
digitalWrite(tempblueled, HIGH);
delay(1000);
digitalWrite(tempblueled, LOW);
delay(1000);
}
void LEVblink() {
digitalWrite(levblueled, HIGH);
delay(1000);
digitalWrite(levblueled, LOW);
delay(1000);
digitalWrite(levblueled, HIGH);
delay(1000);
digitalWrite(levblueled, LOW);
delay(1000);
digitalWrite(levblueled, HIGH);
delay(1000);
digitalWrite(levblueled, LOW);
delay(1000);
digitalWrite(levblueled, HIGH);
delay(1000);
digitalWrite(levblueled, LOW);
delay(1000);
}
void TURBblink() {
digitalWrite(turbblueled, HIGH);
delay(1000);
digitalWrite(turbblueled, LOW);
delay(1000);
digitalWrite(turbblueled, HIGH);
delay(1000);
digitalWrite(turbblueled, LOW);
delay(1000);
digitalWrite(turbblueled, HIGH);
delay(1000);
digitalWrite(turbblueled, LOW);
delay(1000);
digitalWrite(turbblueled, HIGH);
delay(1000);
digitalWrite(turbblueled, LOW);
delay(1000);
}
Water Quality Monitoring and Notification System Using Arduino Based GSM System software
ArduinoNo preview (download only).




{kind=link}
Comments