I recently joined Tampa Hackerspace as an intern and have really wanted to gain some experience with microcontrollers. With this in mind, Bill Shaw gave me an Arduino 101 and essentially said "Make something cool." I saw this as a perfect opportunity to make something which would teach me a lot about arduino and would also help me with another project I've been tasked with: making a deployable rover for SOAR (Society of Aeronautics and Rocketry) at USF. I decided I would make a remote controlled rover and after reading about the Arduino 101's Bluetooth Low Energy capabilities it just seemed like the natural choice.
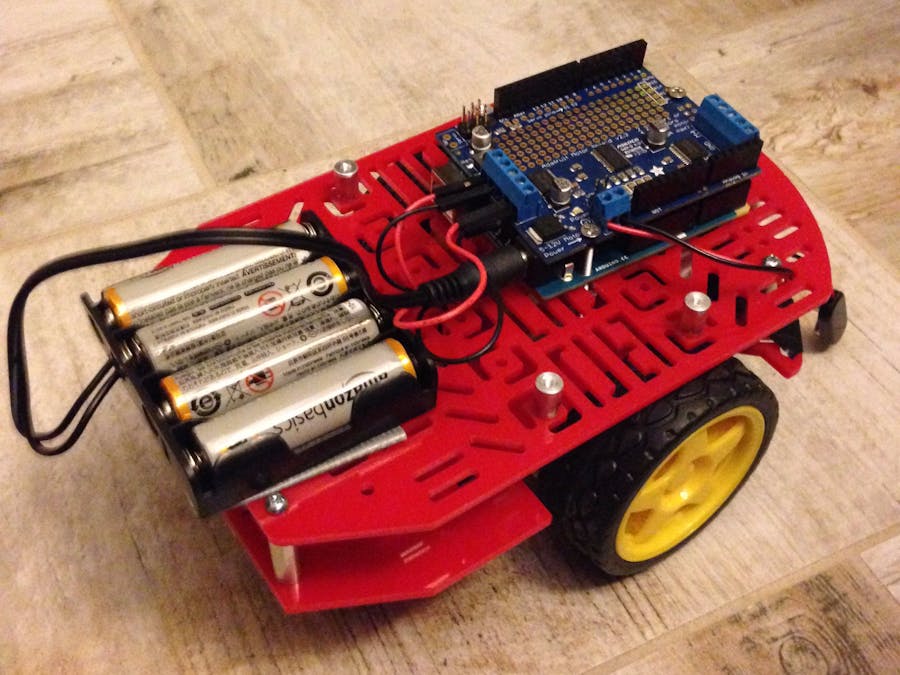
When it came time to build, I had the plan for the software all laid out in my head and used a Sparkfun RedBot kit for the main bulk of the rover's body. The first thing I did was assemble the chassis (the instructions for which can be found here: https://www.sparkfun.com/products/retired/12697 ). Once it was constructed to satisfaction (some parts could be excluded because I was not using the provided board) I added my Arduino board with motor shield attached via two flat head screws and nuts.
Then came time to write the code, which is broken into two pieces: the Arduino code and the HTML smartphone app (made with visualcode and evothings studio). Due to my lack of prior knowledge particularly with HTML, I wrote the code using snippets from example programs in both IDEs which were tweaked to suit my project's needs. The final result, as it currently stands, is a rover which can drive forwards, backwards, and rotate in either direction. I plan to add upgraded functionality in the future.




_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





Comments