


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
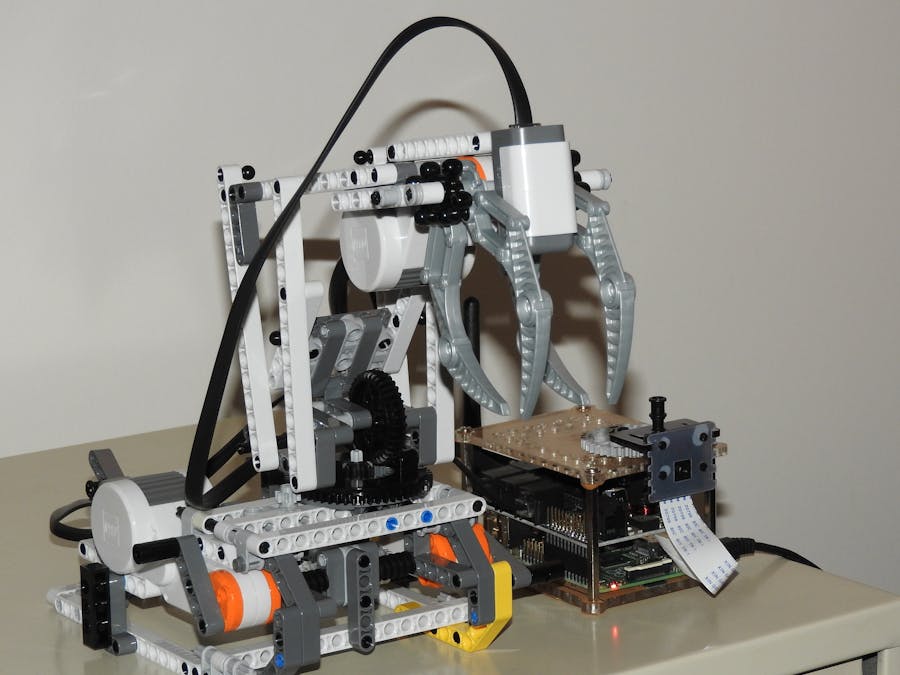
This project involves the creation of a robotic arm using the Lego Mindstorms NXT kit and using the Raspberry Pi with the BrickPi expansion board to run it. The BrickPi board uses the first 26 pins of the GPIO on the Raspberry Pi and can be powered with the supplied battery pack or a 5V power source. I've played around with Mindstorms kit for a while now and I wanted to test out the capabilities of BrickPi.
The arm is controlled via WiFi. I remotely connect into the Pi and I execute a python script to activate the arm. From there, I can use the directional keys to move the arm up, down, left, and right. Additionally, I use two other buttons to control the claw of the arm.
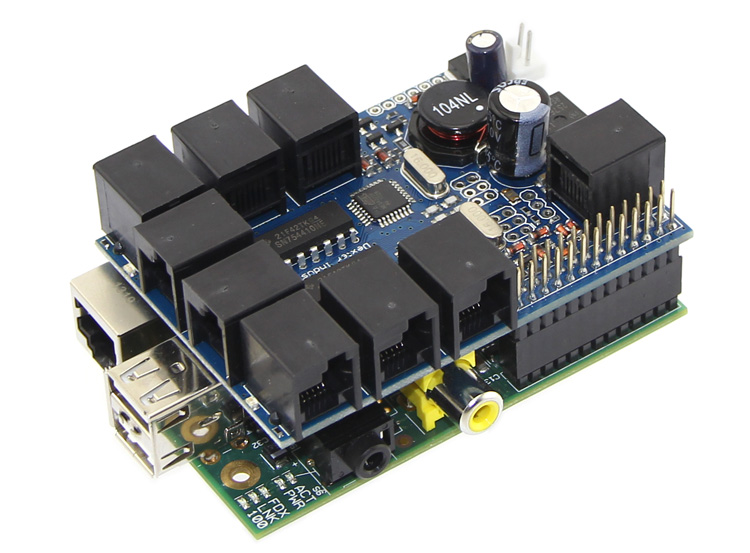
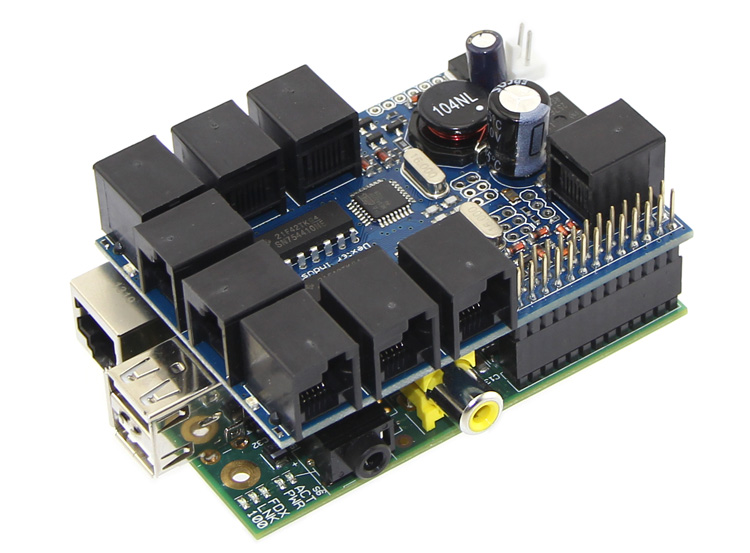
BrickPi connected to Raspberry Pi
This image shows how the BrickPi is connected to the Raspberry Pi. The BrickPi board is connected to the first 26 pins of the RPI's GPIO if you're using a B+ or RPI2. If you're using a model B RPI and below, you can just fit the BrickPi to cover all the GPIO pins. You will notice several ports around the BrickPi that look like telephone jack connectors. These are the ports for the lego motors and sensors. The motor ports (A, B, C, D) are lined along the back of the BrickPi. The ports for the sensors are on the sides of the board.

Marcus Johnson
9 projects • 28 followers
Software engineer with professional experience creating, maintaining, integrating, and testing software in Windows and Unix environments.




{kind=link}
Comments