#include <FastLED.h>
#include <TinyGPS++.h>
#include <EEPROM.h>
#include <avr/wdt.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SH1106.h>
#include <Fonts/nunitoTiny.h>
#include <Fonts/makoSmall.h>
#include <Fonts/gothamBold.h>
static const unsigned char PROGMEM icon[] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x07, 0xff, 0xff, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0xff, 0xff, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x01, 0xff, 0xff, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x01, 0xff, 0xff, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x01, 0xff, 0xfe, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x01, 0xfd, 0xfd, 0xff, 0xcf, 0xff, 0xff, 0xff, 0xff, 0xfe, 0xfc, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0xf9, 0xfc, 0xff, 0x07, 0xff, 0xcf, 0xff, 0xe7, 0xfd, 0xf0, 0x00, 0x00,
0x00, 0x00, 0x00, 0x07, 0xf3, 0xf8, 0xff, 0x07, 0xff, 0x87, 0xff, 0xc3, 0xfb, 0xf0, 0x00, 0x00,
0x00, 0x00, 0x00, 0x0f, 0xe7, 0xf0, 0x7e, 0x07, 0xff, 0x07, 0xff, 0xc3, 0xf7, 0xe0, 0x00, 0x00,
0x00, 0x00, 0x00, 0x1f, 0xff, 0xe0, 0xfc, 0x01, 0xf0, 0x0f, 0xc0, 0x03, 0xe7, 0xc0, 0x00, 0x00,
0x00, 0x00, 0x00, 0x1f, 0xff, 0xc0, 0xf8, 0x03, 0xe0, 0x1f, 0x80, 0x07, 0xcf, 0x80, 0x00, 0x00,
0x00, 0x00, 0x00, 0x3f, 0xff, 0x81, 0xf0, 0x07, 0xc0, 0x1f, 0x00, 0x0f, 0xdf, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x7f, 0xff, 0x03, 0xe0, 0x0f, 0xc0, 0x3e, 0x00, 0x1f, 0xbf, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0xff, 0xfc, 0x07, 0xe0, 0x1f, 0x80, 0x7e, 0x00, 0x3f, 0xfe, 0x00, 0x00, 0x00,
0x00, 0x00, 0x01, 0xfc, 0x00, 0x0f, 0xc0, 0x1f, 0x00, 0xfc, 0x00, 0x3f, 0xfc, 0x00, 0x00, 0x00,
0x00, 0x00, 0x01, 0xfc, 0x00, 0x1f, 0x80, 0x3e, 0x01, 0xf8, 0x00, 0x7f, 0xf8, 0x00, 0x00, 0x00,
0x00, 0x00, 0x03, 0xf8, 0x00, 0x1f, 0x00, 0x7c, 0x01, 0xf0, 0x00, 0xff, 0xf0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x07, 0xf0, 0x00, 0x3e, 0x00, 0xfc, 0x03, 0xe0, 0x01, 0xfb, 0xf0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x0f, 0xe0, 0x00, 0x7e, 0x01, 0xf8, 0x07, 0xe0, 0x03, 0xf7, 0xe0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x0f, 0xc0, 0x00, 0xfc, 0x03, 0xf0, 0x0f, 0xc0, 0x07, 0xe7, 0xc0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x1f, 0xc0, 0x01, 0xf8, 0x03, 0xe0, 0x1f, 0xff, 0x07, 0xcf, 0x80, 0x00, 0x00, 0x00,
0x00, 0x00, 0x3f, 0x80, 0x01, 0xf0, 0x07, 0xc0, 0x1f, 0xfe, 0x0f, 0x9f, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x7f, 0x00, 0x03, 0xe0, 0x0f, 0xc0, 0x3f, 0xfc, 0x1f, 0xbe, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0xfe, 0x00, 0x07, 0xe0, 0x1f, 0x80, 0x1f, 0xf8, 0x3f, 0x7e, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
};
static const unsigned char PROGMEM light[] = {
0x00, 0x00,
0x00, 0x00,
0x01, 0x80,
0x19, 0x98,
0x1d, 0xb8,
0x0c, 0x30,
0x01, 0x80,
0x3b, 0xdc,
0x3b, 0xdc,
0x01, 0x80,
0x0c, 0x30,
0x1d, 0xb8,
0x19, 0x98,
0x01, 0x80,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM stp[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x80,
0x02, 0xa0,
0x02, 0xa8,
0x02, 0xa8,
0x02, 0xa8,
0x03, 0xf8,
0x33, 0xf8,
0x1b, 0xf8,
0x0f, 0xf8,
0x07, 0xf8,
0x03, 0xf0,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM horn[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x01, 0xc4,
0x03, 0xae,
0x07, 0x2c,
0x1f, 0x00,
0x7f, 0x6e,
0x7f, 0x6e,
0x1f, 0x00,
0x07, 0x2c,
0x03, 0xae,
0x01, 0xc4,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM battery[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0xff, 0xfe,
0x80, 0x02,
0xb6, 0xdb,
0xb6, 0xdb,
0xb6, 0xdb,
0xb6, 0xdb,
0x80, 0x02,
0xff, 0xfe,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM satellite[] = {
0x00, 0x00,
0x00, 0x00,
0x01, 0x00,
0x02, 0x80,
0x0c, 0x40,
0x0e, 0x20,
0x17, 0x40,
0x23, 0x80,
0x11, 0x92,
0x0a, 0x12,
0x04, 0x62,
0x00, 0x04,
0x00, 0x08,
0x00, 0x70,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM power[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x01, 0x80,
0x0d, 0xb0,
0x0d, 0xb0,
0x19, 0x98,
0x19, 0x98,
0x18, 0x18,
0x18, 0x18,
0x0c, 0x30,
0x0f, 0xf0,
0x03, 0xc0,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM miles[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x6e, 0x78,
0x7f, 0xfc,
0x3b, 0xdc,
0x31, 0x8c,
0x31, 0x8c,
0x31, 0x8c,
0x7b, 0xde,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM kilos[] = {
0x00, 0x00,
0x00, 0x00,
0x1c, 0x00,
0x0c, 0x00,
0x0c, 0x00,
0x0c, 0x70,
0x0c, 0xe0,
0x0d, 0xc0,
0x0f, 0x80,
0x0f, 0x00,
0x0f, 0x80,
0x0d, 0xc0,
0x0c, 0xe0,
0x1e, 0xf0,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM reset[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x78,
0x0c, 0x70,
0x1c, 0x78,
0x18, 0x58,
0x30, 0x0c,
0x30, 0x0c,
0x30, 0x0c,
0x30, 0x0c,
0x18, 0x18,
0x1c, 0x38,
0x0f, 0xf0,
0x03, 0xc0,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM back[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x03, 0x80,
0x07, 0x00,
0x0e, 0x00,
0x1c, 0x00,
0x3f, 0xfc,
0x3f, 0xfc,
0x1c, 0x00,
0x0e, 0x00,
0x07, 0x00,
0x03, 0x80,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM error[] = {
0x00, 0x00,
0x00, 0x00,
0x01, 0x80,
0x03, 0xc0,
0x03, 0xc0,
0x06, 0x60,
0x06, 0x60,
0x0e, 0x70,
0x0e, 0x70,
0x1e, 0x78,
0x1e, 0x78,
0x3f, 0xfc,
0x3e, 0x7c,
0x7e, 0x7e,
0x7f, 0xfe,
0x00, 0x00
};
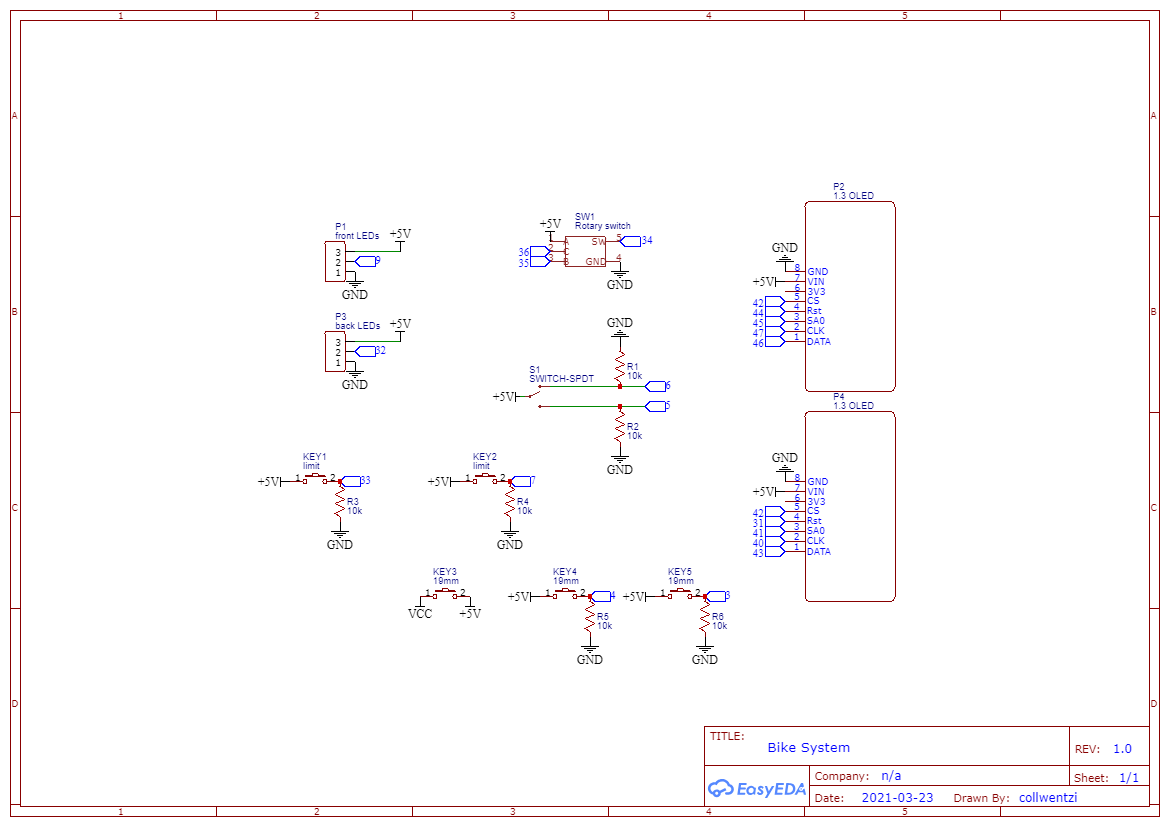
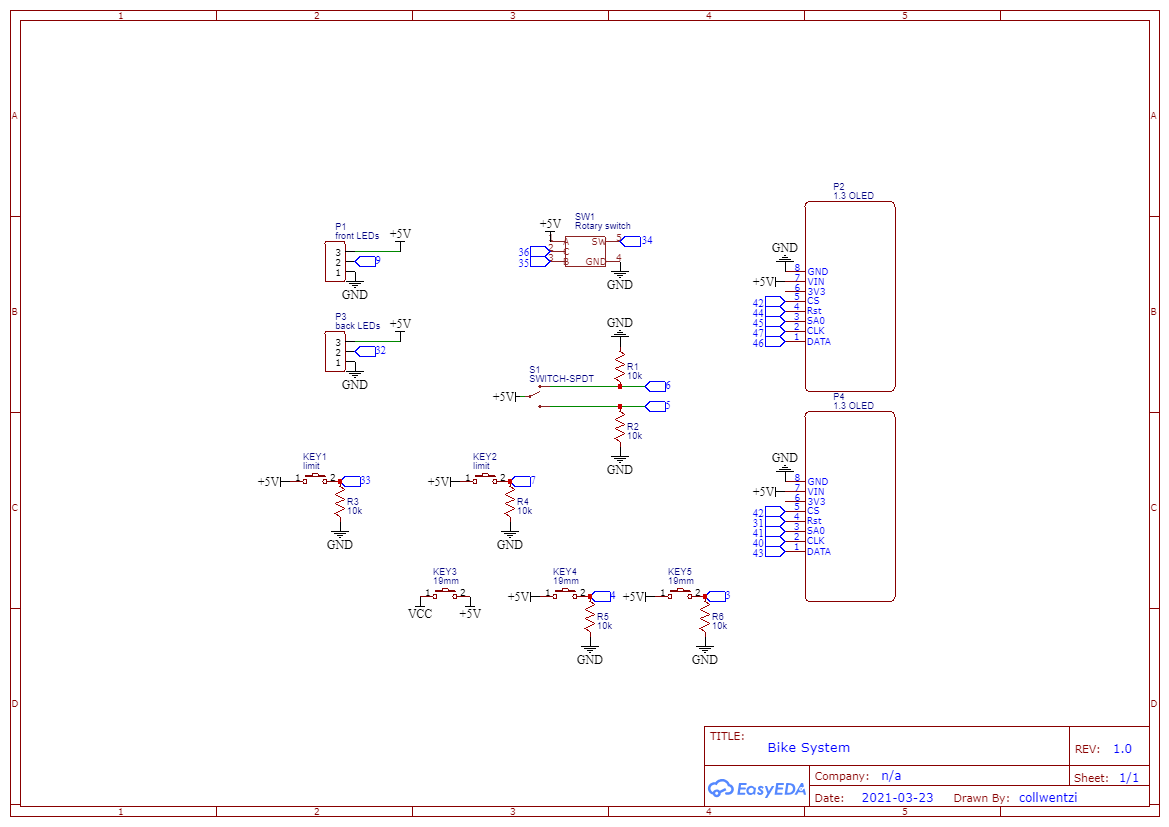
#define LCLK 47
#define LMOSI 46
#define LRESET 44
#define LDC 45
#define LCS 42
Adafruit_SH1106 lscr(LMOSI, LCLK, LDC, LRESET, LCS);
#define RCLK 40
#define RMOSI 43
#define RRESET 31
#define RDC 41
#define RCS 29
Adafruit_SH1106 rscr(RMOSI, RCLK, RDC, RRESET, RCS);
#define frontPin 9
#define frontNum 12
#define brakePin 32
#define brakeNum 12
CRGB brakeLEDS[brakeNum];
CRGB frontLEDS[frontNum];
TinyGPSPlus gps;
#define CLK 36
#define DT 35
#define SW 34
int counter = 0;
int currentStateCLK;
int lastStateCLK;
unsigned long lastButtonPress = 0;
unsigned long lastDraw = 0;
unsigned long lastBatt = 0;
int lblkState = 0;
int rblkState = 0;
int brakeState = 0;
int lightState = 0;
int hornState = 0;
int ahornState = 0;
int menuState = 0;
#define CLEAR CRGB(0, 0, 0)
#define LRED CRGB(40, 0, 0)
#define RED CRGB(255, 0, 0)
#define ORANGE CRGB(255, 40, 0)
#define WHITE CRGB(255, 255, 255)
int x, y;
int16_t x1, y1;
uint16_t w, h;
boolean menu = false;
int uph = 0;
double perc = 0;
int strength = 0;
String currTime = "";
String currDate = "";
int battLevel = 0;
int positionsX[] = {81, 79, 77, 76, 75, 75, 75, 76, 77, 79, 81, 83, 86, 89, 92, 95, 98, 101, 104, 107, 109, 111, 113, 114, 115, 115, 115, 114, 113, 111, 109};
int positionsY[] = {45, 43, 40, 37, 34, 31, 28, 25, 22, 19, 17, 15, 13, 12, 11, 11, 11, 12, 13, 15, 17, 19, 22, 25, 28, 31, 34, 37, 40, 43, 45 };
boolean gpsEnabled = true;
boolean lightOn = false;
boolean tailOn = false;
void setup() {
Serial.begin(9600);
Serial1.begin(9600);
pinMode(5, INPUT);
pinMode(6, INPUT);
pinMode(7, INPUT);
pinMode(4, INPUT);
pinMode(3, INPUT);
pinMode(33, INPUT);
pinMode(38, OUTPUT);
pinMode(CLK,INPUT);
pinMode(DT,INPUT);
pinMode(SW, INPUT_PULLUP);
lastStateCLK = digitalRead(CLK);
rscr.begin(SH1106_SWITCHCAPVCC);
lscr.begin(SH1106_SWITCHCAPVCC);
delay(100);
FastLED.addLeds<WS2812, brakePin, GRB>(brakeLEDS, brakeNum);
FastLED.addLeds<WS2812, frontPin, GRB>(frontLEDS, frontNum);
clr();
FastLED.show();
rscr.clearDisplay();
rscr.setTextColor(WHITE);
rscr.setFont(&makoSmall);
rscr.setCursor(7, 25);
rscr.print("Designed by");
rscr.setFont(&nunitoTiny);
rscr.setCursor(7, 45);
rscr.print("Collin W");
rscr.display();
lscr.clearDisplay();
lscr.setTextColor(WHITE);
lscr.drawBitmap(0, 0, icon, 128, 64, WHITE);
lscr.display();
delay(2000);
Serial.println("PITCHsmart by Collin W");
drawLeftScreen();
drawRightScreen();
}
void drawLeftScreen() {
lscr.clearDisplay();
lscr.drawLine(0, 19, 127, 19, WHITE);
if(lblkState == HIGH) {
lscr.drawLine(3, 8, 8, 3, WHITE);
lscr.drawLine(3, 9, 9, 3, WHITE);
lscr.drawLine(4, 9, 9, 4, WHITE);
lscr.drawLine(3, 9, 8, 14, WHITE);
lscr.drawLine(3, 8, 9, 14, WHITE);
lscr.drawLine(4, 8, 9, 13, WHITE);
} else if(rblkState == HIGH) {
lscr.drawLine(119, 3, 124, 8, WHITE);
lscr.drawLine(118, 3, 124, 9, WHITE);
lscr.drawLine(118, 4, 123, 9, WHITE);
lscr.drawLine(119, 14, 124, 9, WHITE);
lscr.drawLine(118, 14, 124, 8, WHITE);
lscr.drawLine(118, 13, 123, 8, WHITE);
}
if(brakeState == HIGH) {
lscr.drawBitmap(30, 1, stp, 16, 16, WHITE);
}
if(hornState == HIGH || ahornState == HIGH) {
digitalWrite(38, HIGH);
lscr.drawBitmap(55, 1, horn, 16, 16, WHITE);
} else {
digitalWrite(38, LOW);
}
if(lightState == HIGH) {
lscr.drawBitmap(80 , 1, light, 16, 16, WHITE);
}
lscr.drawBitmap(7, 25, battery, 16, 16, WHITE);
lscr.drawBitmap(7, 44, satellite, 16, 16, WHITE);
lscr.setFont(&makoSmall);
lscr.setCursor(27, 36);
lscr.print("100%");
lscr.setCursor(27, 55);
if(gpsEnabled == true)
lscr.print(String(strength));
else
lscr.print("--");
if(currTime == "")
currTime = "--:--";
lscr.getTextBounds(currTime, x, y, &x1, &y1, &w, &h);
lscr.setCursor(119 - w, 36);
lscr.print(currTime);
if(currDate == "")
currDate = "--/--";
lscr.getTextBounds(currDate, x, y, &x1, &y1, &w, &h);
lscr.setCursor(119 - w, 55);
lscr.print(currDate);
lscr.display();
}
void drawRightScreen() {
rscr.clearDisplay();
rscr.setFont(&nunitoTiny);
rscr.setCursor(7, 54);
if(EEPROM.read(0) == 0)
rscr.print("mph");
else
rscr.print("kmph");
rscr.setFont(&gothamBold16pt7b);
rscr.setCursor(7, 34);
if(gpsEnabled == true)
rscr.print(String(uph));
else
rscr.print("--");
rscr.drawCircle(95, 31, 30, WHITE);
rscr.fillTriangle(95, 31, 66, 61, 124, 61, BLACK);
rscr.drawLine(66, 31, 124, 31, WHITE);
rscr.drawLine(95, 2, 95, 31, WHITE);
rscr.drawLine(75, 11, 115, 51, WHITE);
rscr.drawLine(75, 51, 115, 11, WHITE);
rscr.fillCircle(95, 31, 23, BLACK);
rscr.fillCircle(95, 31, 2, WHITE);
rscr.setFont(&makoSmall);
rscr.setCursor(81, 45);
rscr.print("0");
rscr.setCursor(99, 45);
if(EEPROM.read(0) == 0)
rscr.print("30");
else
rscr.print("60");
rscr.getTextBounds(String(perc) + "%", x, y, &x1, &y1, &w, &h);
rscr.setCursor(95 - (w / 2), 60);
rscr.print(String(perc) + "%");
if(uph <= 30 && EEPROM.read(0) == 0)
rscr.drawLine(95, 31, positionsX[uph], positionsY[uph], WHITE);
else if(uph <= 60 && EEPROM.read(0) == 1)
rscr.drawLine(95, 31, positionsX[uph/2], positionsY[uph/2], WHITE);
rscr.display();
}
void drawMenu(int option) {
if(menu == false) {
counter = option;
menu = true;
animate(true);
lscr.clearDisplay();
rscr.clearDisplay();
lscr.display();
rscr.display();
}
lscr.drawBitmap(3, 13, power, 16, 16, WHITE);
lscr.drawBitmap(67, 13, reset, 16, 16, WHITE);
if(EEPROM.read(0) == 0) {
lscr.fillRect(3, 42, 16, 16, BLACK);
lscr.drawBitmap(3, 42, miles, 16, 16, WHITE);
} else {
lscr.fillRect(3, 42, 16, 16, BLACK);
lscr.drawBitmap(3, 42, kilos, 16, 16, WHITE);
}
lscr.drawBitmap(67, 42, back, 16, 16, WHITE);
lscr.drawRect(1, 11, 61, 20, BLACK);
lscr.drawRect(65, 11, 61, 20, BLACK);
lscr.drawRect(1, 40, 61, 20, BLACK);
lscr.drawRect(65, 40, 61, 20, BLACK);
if(option == 0)
lscr.drawRect(1, 11, 61, 20, WHITE);
else if(option == 1)
lscr.drawRect(65, 11, 61, 20, WHITE);
else if(option == 2)
lscr.drawRect(1, 40, 61, 20, WHITE);
else if(option == 3)
lscr.drawRect(65, 40, 61, 20, WHITE);
lscr.setFont(&makoSmall);
lscr.setCursor(22, 24);
lscr.print("Power");
lscr.setCursor(86, 24);
lscr.print("Reset");
lscr.setCursor(22, 53);
lscr.print("Units");
lscr.setCursor(86, 53);
lscr.print("Back");
lscr.display();
if(menu == true && option == -1) {
animate(false);
menu = false;
}
}
void animate(boolean in) {
if(in == true) {
drawLeftScreen();
for(int x = 0; x < 64; x += 4) {
lscr.drawLine(0, x, x * 2, 0, WHITE);
if(x != 0) {
lscr.drawLine(0, x - 1, (x * 2) - 2, 0, BLACK);
lscr.drawLine(0, x - 2, (x * 2) - 4, 0, BLACK);
lscr.drawLine(0, x - 3, (x * 2) - 6, 0, BLACK);
lscr.drawLine(0, x - 4, (x * 2) - 8, 0, BLACK);
}
lscr.display();
}
lscr.drawLine(0, 62, 126, 0, BLACK);
lscr.drawLine(0, 61, 124, 0, BLACK);
lscr.drawLine(0, 60, 122, 0, BLACK);
lscr.drawLine(0, 59, 120, 0, BLACK);
for(int x = 0; x < 64; x += 4) {
lscr.drawLine(x * 2, 63, 127, x, WHITE);
if(x != 0) {
lscr.drawLine((x * 2) - 2, 63, 127, x - 1, BLACK);
lscr.drawLine((x * 2) - 4, 63, 127, x - 2, BLACK);
lscr.drawLine((x * 2) - 6, 63, 127, x - 3, BLACK);
lscr.drawLine((x * 2) - 8, 63, 127, x - 4, BLACK);
}
lscr.display();
}
} else if(in == false) {
for(int x = 63; x > -1; x -= 4) {
lscr.drawLine(x * 2, 63, 127, x, WHITE);
if(x != 63) {
lscr.drawLine((x * 2) + 2, 63, 127, x + 1, BLACK);
lscr.drawLine((x * 2) + 4, 63, 127, x + 2, BLACK);
lscr.drawLine((x * 2) + 6, 63, 127, x + 3, BLACK);
lscr.drawLine((x * 2) + 8, 63, 127, x + 4, BLACK);
}
lscr.display();
}
lscr.drawLine(2, 63, 127, 1, BLACK);
lscr.drawLine(4, 63, 127, 2, BLACK);
lscr.drawLine(6, 63, 127, 3, BLACK);
lscr.drawLine(8, 53, 127, 4, BLACK);
for(int x = 63; x > -1; x -= 4) {
lscr.drawLine(0, x, x * 2, 0, WHITE);
if(x != 63) {
lscr.drawLine(0, x + 1, (x * 2) + 2, 0, BLACK);
lscr.drawLine(0, x + 2, (x * 2) + 4, 0, BLACK);
lscr.drawLine(0, x + 3, (x * 2) + 6, 0, BLACK);
lscr.drawLine(0, x + 4, (x * 2) + 8, 0, BLACK);
}
lscr.display();
}
drawLeftScreen();
drawRightScreen();
}
}
void checkData() {
brakeState = digitalRead(7);
lblkState = digitalRead(6);
rblkState = digitalRead(5);
lightState = digitalRead(4);
hornState = digitalRead(3);
ahornState = digitalRead(33);
menuState = digitalRead(SW);
if(gpsEnabled == true) {
if(Serial1.available() > 0) {
if(gps.encode(Serial1.read())) {
if (gps.speed.isValid()) {
if(EEPROM.read(0) == 0)
uph = gps.speed.mph();
else
uph = gps.speed.kmph();
if(EEPROM.read(0) == 0)
perc = gps.speed.mph() / 0.3;
else
perc = gps.speed.kmph() / 0.6;
int hr = 0;
if(gps.time.hour() > 12)
hr = gps.time.hour() - 12;
else
hr = gps.time.hour();
if(hr < 9)
hr = hr + 5;
else
hr = hr - 7;
if(gps.time.minute() < 10)
currTime = String(hr) + ":0" + String(gps.time.minute());
else
currTime = String(hr) + ":" + String(gps.time.minute());
if(gps.time.hour() < 13)
currDate = String(gps.date.month()) + "/" + String(gps.date.day() - 1);
else
currDate = String(gps.date.month()) + "/" + String(gps.date.day());
strength = gps.satellites.value();
drawRightScreen();
}
}
}
if(millis() > 5000 && gps.charsProcessed() < 10) {
gpsEnabled = false;
drawLeftScreen();
drawRightScreen();
lscr.display();
}
}
if(brakeState == HIGH && lblkState == LOW && rblkState == LOW && tailOn == false) {
tailOn = true;
brake();
} else if(brakeState == LOW && lblkState == LOW && rblkState == LOW && tailOn == true) {
tailOn = false;
if(lightState == HIGH) {
for(int x = 0; x < brakeNum; x++) {
brakeLEDS[x] = LRED;
}
} else {
for(int x = 0; x < brakeNum; x++) {
brakeLEDS[x] = CLEAR;
}
}
FastLED.show();
}
if(lblkState == HIGH) {
drawLeftScreen();
lblink();
} else if(rblkState == HIGH) {
drawLeftScreen();
rblink();
}
if(lightState == HIGH && lblkState == LOW && rblkState == LOW && lightOn == false) {
lightOn = true;
frontLight();
if(lblkState == LOW && rblkState == LOW && brakeState == LOW)
tailLight();
} else if(lightState == LOW && lblkState == LOW && rblkState == LOW && lightOn == true) {
lightOn = false;
for(int x = 0; x < frontNum; x++) {
frontLEDS[x] = CLEAR;
}
for(int x = 0; x < brakeNum; x++) {
brakeLEDS[x] = CLEAR;
}
FastLED.show();
}
if(menuState == LOW) {
if(millis() - lastButtonPress > 50) {
drawMenu(0);
}
lastButtonPress = millis();
}
if(millis() - lastDraw > 100 && menu == false) {
drawLeftScreen();
lastDraw = millis();
}
}
void clr() {
for(int x = 0; x < brakeNum; x++) {
brakeLEDS[x] = CLEAR;
}
for(int x = 0; x < frontNum; x++) {
frontLEDS[x] = CLEAR;
}
FastLED.show();
}
void frontLight() {
for(int x = 0; x < frontNum; x++) {
frontLEDS[x] = WHITE;
}
FastLED.show();
}
void tailLight() {
for(int x = 0; x < brakeNum; x++) {
brakeLEDS[x] = LRED;
}
FastLED.show();
}
void brake() {
for(int i = 0; i < 12; i++) {
brakeLEDS[i] = RED;
}
FastLED.show();
}
void lblink() {
for(int i = 7; i > -2; i -= 1) {
for(int x = 0; x < brakeNum; x++) {
brakeLEDS[x] = CLEAR;
}
for(int x = 0; x < frontNum; x++) {
frontLEDS[x] = CLEAR;
}
if(i < 6 && i != -1) {
brakeLEDS[i] = ORANGE;
brakeLEDS[11 - i] = ORANGE;
}
if(i > 0) {
brakeLEDS[i - 1] = ORANGE;
brakeLEDS[12 - i] = ORANGE;
}
if(i > 1) {
brakeLEDS[i - 2] = ORANGE;
brakeLEDS[13 - i] = ORANGE;
}
if(i == 5 || i == 4) {
frontLEDS[0] = ORANGE;
frontLEDS[7] = ORANGE;
frontLEDS[8] = ORANGE;
}
if(i == 4 || i == 3) {
frontLEDS[1] = ORANGE;
frontLEDS[6] = ORANGE;
frontLEDS[9] = ORANGE;
}
if(i == 3 || i == 2) {
frontLEDS[2] = ORANGE;
frontLEDS[5] = ORANGE;
frontLEDS[10] = ORANGE;
}
if(i == 2 || i == 1) {
frontLEDS[3] = ORANGE;
frontLEDS[4] = ORANGE;
frontLEDS[11] = ORANGE;
}
FastLED.show();
delay(75);
}
lightOn = false;
tailOn = false;
}
void rblink() {
for(int i = 0; i < 9; i++) {
for(int x = 0; x < brakeNum; x++) {
brakeLEDS[x] = CLEAR;
}
for(int x = 0; x < frontNum; x++) {
frontLEDS[x] = CLEAR;
}
if(i < 6) {
brakeLEDS[i] = ORANGE;
brakeLEDS[11 - i] = ORANGE;
}
if(i != 0 && i < 7) {
brakeLEDS[i - 1] = ORANGE;
brakeLEDS[12 - i] = ORANGE;
}
if(i > 1 && i != 8) {
brakeLEDS[i - 2] = ORANGE;
brakeLEDS[13 - i] = ORANGE;
}
if(i == 2 || i == 3) {
frontLEDS[3] = ORANGE;
frontLEDS[4] = ORANGE;
frontLEDS[11] = ORANGE;
}
if(i == 3 || i == 4) {
frontLEDS[2] = ORANGE;
frontLEDS[5] = ORANGE;
frontLEDS[10] = ORANGE;
}
if(i == 4 || i == 5) {
frontLEDS[1] = ORANGE;
frontLEDS[6] = ORANGE;
frontLEDS[9] = ORANGE;
}
if(i == 5 || i == 6) {
frontLEDS[0] = ORANGE;
frontLEDS[7] = ORANGE;
frontLEDS[8] = ORANGE;
}
FastLED.show();
delay(75);
}
lightOn = false;
tailOn = false;
}
void lowPowerMode() {
lscr.clearDisplay();
rscr.clearDisplay();
lscr.display();
rscr.display();
frontLight();
tailLight();
while(true) {}
}
void loop() {
if(menu == false) {
checkData();
} else {
currentStateCLK = digitalRead(CLK);
menuState = digitalRead(SW);
if(currentStateCLK != lastStateCLK && currentStateCLK == 1) {
if(digitalRead(DT) != currentStateCLK) {
if(counter != 3)
counter ++;
} else {
if(counter != 0)
counter --;
}
drawMenu(counter);
}
lastStateCLK = currentStateCLK;
if(menuState == LOW && counter == 0) {
if(millis() - lastButtonPress > 50) {
lowPowerMode();
}
lastButtonPress = millis();
} else if(menuState == LOW && counter == 1) {
if(millis() - lastButtonPress > 50) {
wdt_disable();
wdt_enable(WDTO_15MS);
}
lastButtonPress = millis();
} else if(menuState == LOW && counter == 2) {
if(millis() - lastButtonPress > 50) {
if(EEPROM.read(0) == 0)
EEPROM.write(0, 1);
else
EEPROM.write(0, 0);
drawMenu(2);
}
lastButtonPress = millis();
} else if(menuState == LOW && counter == 3) {
if(millis() - lastButtonPress > 50) {
drawMenu(-1);
}
lastButtonPress = millis();
}
delay(1);
}
}




_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















{kind=link}
Comments