Most digital TV antennas are uni-directional. What this means is that to get the best reception, you must point most digital antennas in the direction of the television station broadcast antenna. To assist the public, the Federal Communications Commission(FCC) and a number of other websites have composed web based tools that allow viewers to enter their address into an online form. Based on the information entered, the website returns the stations that should be accessible from that location, as well as the direction that a uni-directional antenna should be turned to in order to get the best reception. According to where you live, this may require you to point your digital antenna in a number of different directions in any given day.
The project will eliminate the need to manually turn your antenna to maximize your TV channel reception and channel strength. Once you have completed this project, you will need to enter the channels and directions that you obtain from the FCC website and similar websites (example:antennaweb, org) into the code. Upload the code to the device. After that is done, antenna direction can be changed via Bluetooth capable cell phones and tablets without leaving the comfort of your couch or bed. Below are a few additional pictures of my final antenna mount with the antenna on it.
Click *here for full step-by-step design instructions.* The link takes you to my page that includes both videos and written step-by-step instructions as well as design decisions, construction approaches, errors to avoid and testing in multiple stages of development. The page that the link leads to also includes modifications made since the project was posted here.
DTV Antenna Direction Finder and Pointer - Final Code
Arduino
This code/sketch makes DTV transmitter antenna finding easy. This code drives a bipolar stepper motor to point a DTV antenna towards a DTV transmitter antenna locations based on a premade channel list. A list of channels in the United States and corresponding angles relative to your location can be found on a number of sites such as AntennaWeb and the on the FCC website.
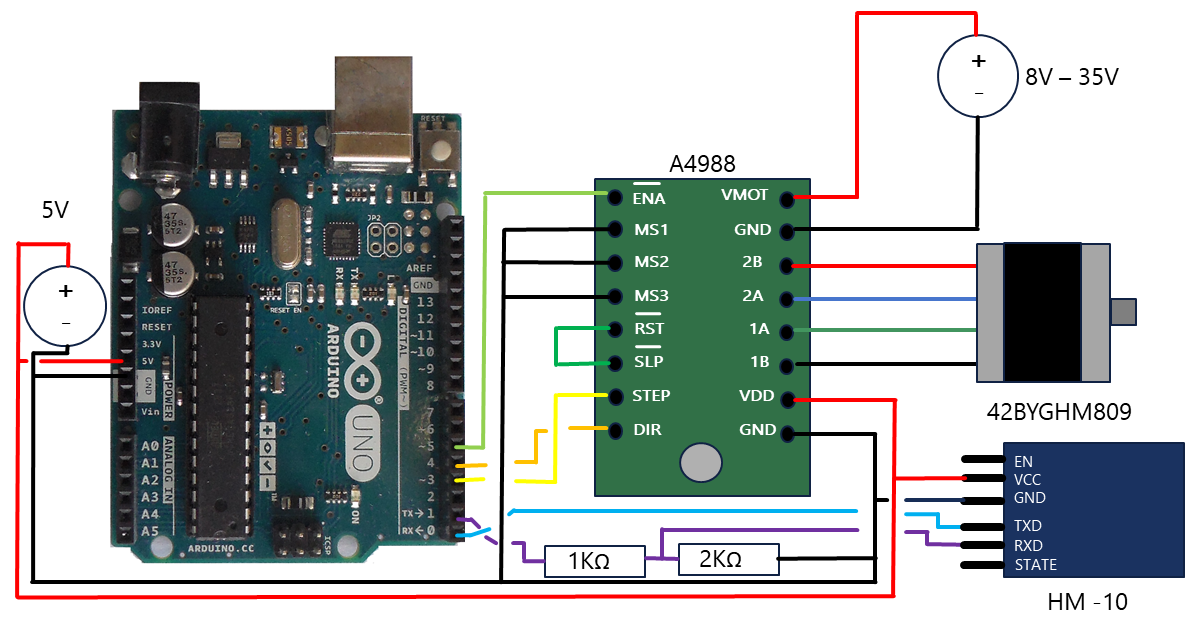
The stepper motor that turns the antenna is connected to the Arduino/Genuino board via a A4988 motor driver that is connected to pins 3-5 of the Arduino/Genuin. Communication with the Arduino can be done via an HM-10 Bluetooth board. A Bluetooth Terminal application will be needed to communicate with the HM-10 Bluetooth board. When a 0 is entered at the Bluetooth Terminal app's prompt, the Arduino/Genuino decrements through the list of channels in the myChannelNum[] array. When a 1 is entered in the Bluetooth Terminal app's prompt, the Arduino/Genuino increment through channels listed in the same array via. Based on the channel selected from the list, the motor will turn your antenna to the corresponding angle in the myChannelDegAngle[] array.
/* File/Sketch Name: DTV-Antenna-Direction-Finder Version No.: v1.0 Created 14 April, 2019 Original Author: Clyde A. Lettsome, PhD, PE, MEM Description: This code/sketch makes DTV transmitter antenna finding easy. This code drives a bipolar stepper motor to point a DTV antenna towards a DTV transmitter antenna locations based on a premade channel list. A list of channels in the United States and corresponding angles relative to your location can be found on a number of sites such as AntennaWeb and the on the FCC website. The stepper motor that turns the antenna is connected to the Arduino/Genuino board via a A4988 motor driver that is connected to pins 3-5 of the Arduino/Genuin. Communication with the Arduino can be done via an HM-10 Bluetooth board. A Bluetooth Termainal application will be needed to communicate with the HM-10 Bluetooth board. When a 0 is entered at the Bluetooth Terminal app's prompt, the Arduino/Genuino decrement through the list of channels in the myChannelNum[] array. When a 1 is entered in the Bluetooth Terminal app's prompt, the Arduino/Genuino increment through channels listed in the same array via. Based on the channel selected from the list, the motor will turn your antenna to the corresponding angle in the myChannelDegAngle[] array. License: This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License (GPL) version 3, or any later version of your choice, as published by the Free Software Foundation. Notes: Copyright (c) 2019 by C. A. Lettsome Services, LLC For more information visit https://clydelettsome.com/blog/2019/05/14/motorized-digital-tv-antenna-mount-aka-digital-tv-antenna-pointer/ */constintstepPin=3;constintdirPin=4;constintenablePin=5;intrevolutionStepCount=0;// number of steps the motor has taken in the current revolutionintmyChannelNum[]={0};// Enter channel numbers here. This is the channel number array. Note: 0 indicates the home beginning position and added channels should be done as shown. Ex. {0,2,4,5, ....}intmyChannelDegAngle[]={0};//Enter channel's angle degrees here. This is the channel degree angle array. Note: 0 degree is due North and added angles should be done as shown. Ex. {0,52,144,59, ....}intmyChannelStepNum[]={0};//Array should contain a list of the number of steps necessary for the stepper motor to get to the angle corresponding to the angle in the myChannelDegAngle[] array.intnumberOfSteps=0;intarrayLength=(sizeof(myChannelStepNum)/sizeof(myChannelStepNum[0]));//Find the number of channels in myChannelNum[] array.charIncoming_value=0;intchannelIndex=0;//Start at beginning angle position (0 degrees or North)and home channel (channel 0)voidsetup(){// Set pin modespinMode(stepPin,OUTPUT);pinMode(dirPin,OUTPUT);pinMode(enablePin,OUTPUT);digitalWrite(enablePin,LOW);//Enable is active lowSerial.begin(9600);// initialize the serial port:}voidloop(){if(Serial.available()>0){Incoming_value=Serial.read();//Read the incoming data and store it into variable Incoming_valueif(Incoming_value=='1')//Checks whether value of Incoming_value is equal to 1 channelIndex++;//increment in the selectionelseif(Incoming_value=='0')//Checks whether value of Incoming_value is equal to 0channelIndex--;//decrease in channel selection//wrap around the channel numbers if at the beginning or end of the arrayif(channelIndex>arrayLength-1)channelIndex=0;elseif(channelIndex<0)channelIndex=(arrayLength-1);if(myChannelStepNum[channelIndex]<revolutionStepCount){digitalWrite(dirPin,LOW);//turn counter-clockwisenumberOfSteps=revolutionStepCount-myChannelStepNum[channelIndex];//find number of step moves required//turn antenna to new locationfor(intsteps=0;steps<numberOfSteps;steps++){//create pulse to turn motor one step at a timedigitalWrite(stepPin,HIGH);delayMicroseconds(10000);digitalWrite(stepPin,LOW);delayMicroseconds(10000);revolutionStepCount--;//increment the step counter}}else{digitalWrite(dirPin,HIGH);//turn clockwisenumberOfSteps=myChannelStepNum[channelIndex]-revolutionStepCount;//find number of step moves required//turn antenna to new locationfor(intsteps=0;steps<numberOfSteps;steps++){//create pulse to turn motor one step at a timedigitalWrite(stepPin,HIGH);delayMicroseconds(10000);digitalWrite(stepPin,LOW);delayMicroseconds(10000);revolutionStepCount++;//increment the step counter}}//print channel, degrees and step number to screenSerial.print("channel, degrees, step: ");Serial.print(myChannelNum[channelIndex]);Serial.print(", ");Serial.print(myChannelDegAngle[channelIndex]);Serial.print(", ");Serial.println(revolutionStepCount);}}





_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments