




Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Hello Friends,
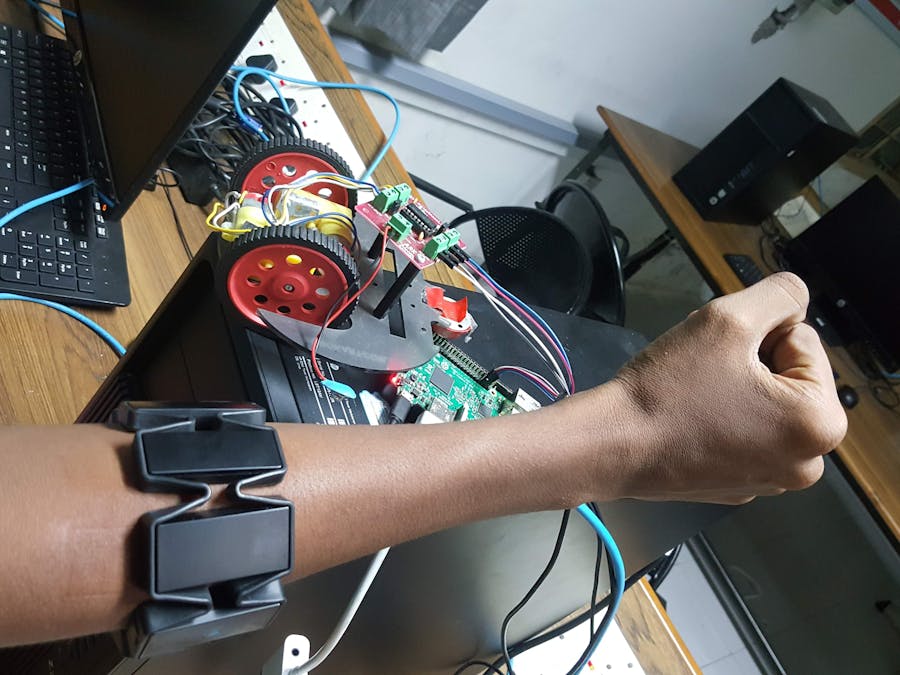
By this project we have managed to control a rover or car using our very own hand gestures alone using Myo band.
Index:- Introduction
- Instantiate MYO in PI
- Build a Rover
- Code Execution
Our end product is a rover that is controlled using MYOBAND. We did this by installing MYO required software in raspberry pi and configuring it, the second one involves setting up the Rover and we finally conclude by executing the code.
Instantiate MYO in PI:Install the following software in PI:
- Python >= 2.6
- Pyserial
- Enum34
from repositories in PI terminal.
Next to test or calibrate your MYO with Pi install PyoConnect from the link below
http://www.fernandocosentino.net/pyoconnect/
the above step is optional if you have already used your MYO in windows then you can skip the part.
Build the Rover:Have any basic framework, any hard material box would do the job, we scrapped some material we had in our college to have our basic framework, after setting up a basic box structure fit wheels and DC motor on both sides of the box, use a ball bearing for the front wheel.
Mount the raspberry pi and add a battery in it for supply
Use a WIFI adapter but its optional.
Insert the MYO adapter in the USB slot.
Connect the H-Bridge motor driver with Motor and PI.
Execute the code Given below in the Link.
The following is the Working Video:






Comments