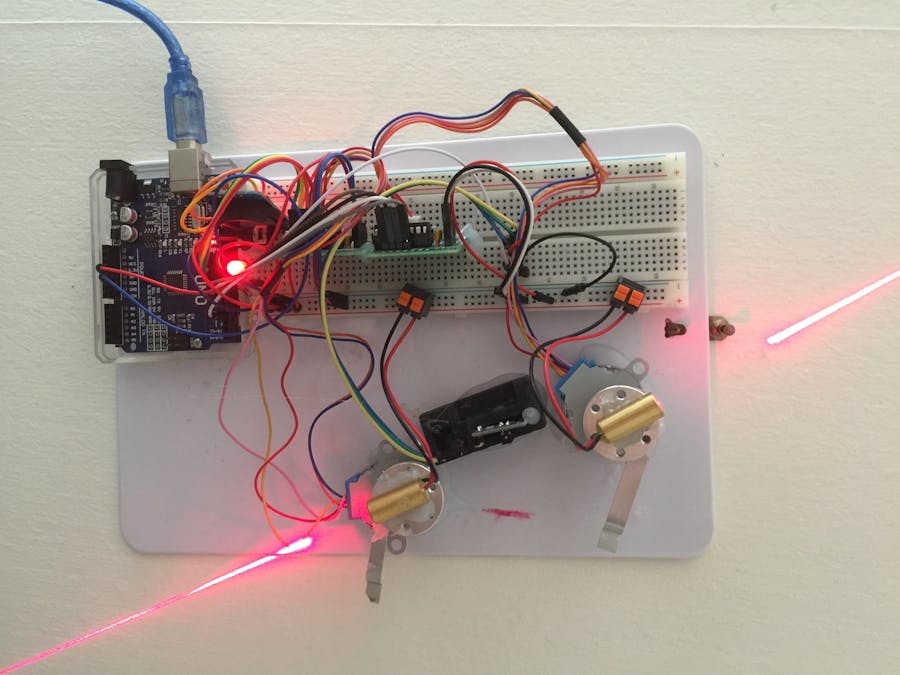
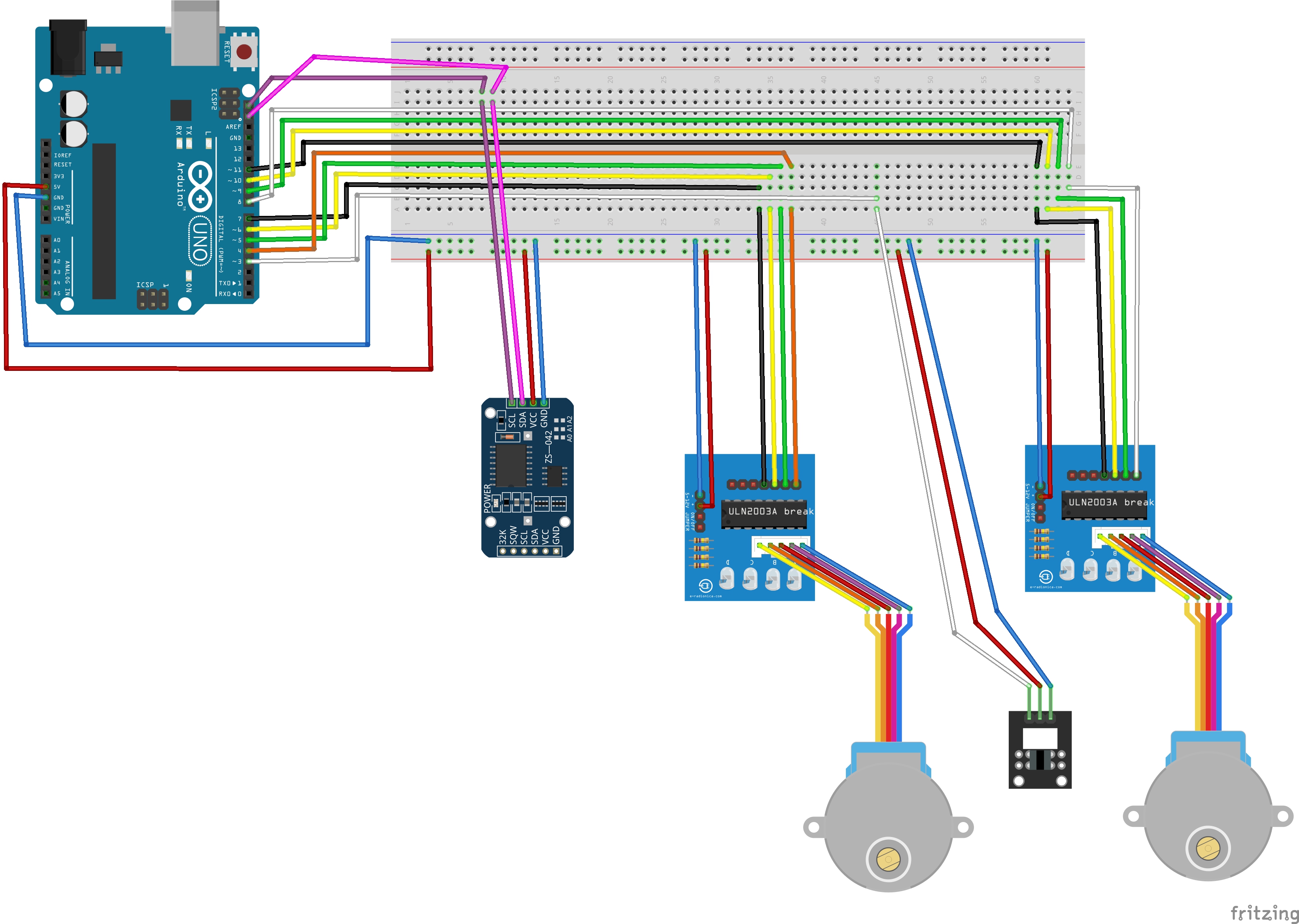
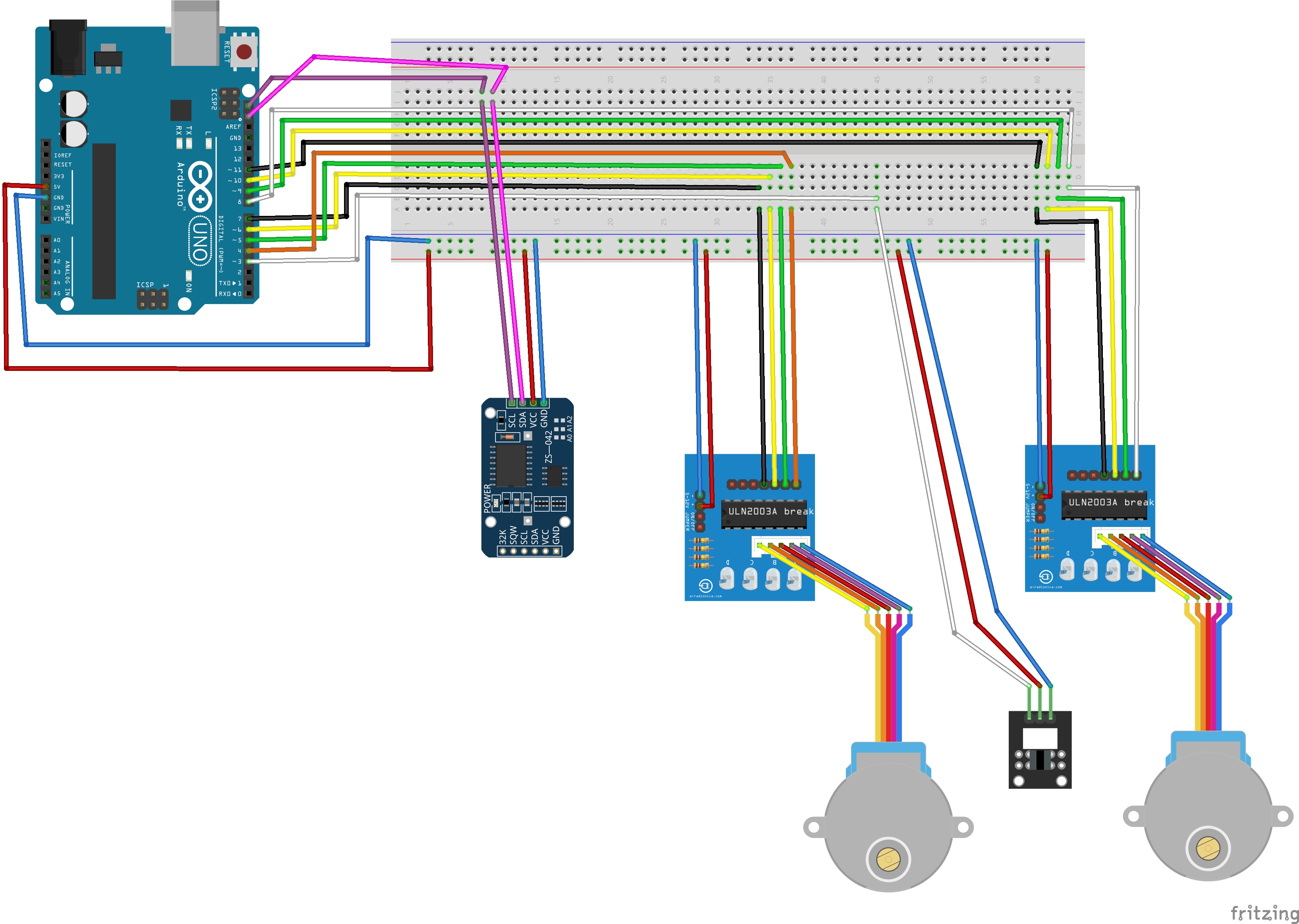
//Dual steppermotor clock with lasers
// communication with RTC and RTC lib
#include <Wire.h>
#include "RTClib.h"
RTC_DS3231 rtc;
//stepper variables and lib
#include <Stepper.h>
#define STEPS 2038 // the number of steps in one revolution of your motor (28BYJ-48)
Stepper stepper1(STEPS, 8, 10, 9, 11); //minute stepper
Stepper stepper2(STEPS, 4, 6, 5, 7); //hour stepper
int startup = 0; // counter for resetting stepperposition
int Led = 13; // define LED pin
int buttonpin = 3; // define photo interrupter signal pin
int val; //define a numeric variable
// Startup, RTC check, calibration of steppers, adjusting steppers to current time
void setup()
{
// RTC Time input
Serial.begin(9600);
delay(3000); // wait for console opening
if (! rtc.begin()) {
Serial.println("Couldn't find RTC");
while (1);
}
//Steppermotor calibration
pinMode(Led, OUTPUT); // LED pin as output
pinMode(buttonpin, INPUT); //photo interrupter pin as input
// minute stepper calibration
do {
val = digitalRead(buttonpin); //read the value of the photointerrupter
if (val == HIGH) // turn on LED when photointerrupter is blocked
{
stepper1.setSpeed(10); // 10 rpm
stepper1.step(-50); // 50 steps from resetpoint
startup = startup + 1;
digitalWrite(Led, HIGH);
}
else
{
stepper1.setSpeed(5); // 5 rpm
stepper1.step(1); // stepping towards photointerrupter
digitalWrite(Led, LOW);
}
} while (startup < 2);
// hour stepper calibration
do {
val = digitalRead(buttonpin); //read the value of the photointerrupter
if (val == HIGH) // turn on LED when photointerrupter is blocked
{
stepper2.setSpeed(10); // 10 rpm
stepper2.step(50); // 50 steps from resetpoint
startup = startup + 1;
digitalWrite(Led, HIGH);
}
else
{
stepper2.setSpeed(5); // 5 rpm
stepper2.step(-1); // stepping towards photointerrupter
digitalWrite(Led, LOW);
}
} while (startup < 4);
startup = 0;
digitalWrite(Led, LOW);
// time check with RTC
DateTime now = rtc.now();
// adjusting steppers to current time
stepper1.setSpeed(10); // 10 rpm
stepper1.step(- now.minute() * 15); // adjust minute stepper
stepper2.setSpeed(10); // 10 rpm
if (now.hour() >= 12) {
stepper2.step((now.hour() - 12) * 60 + now.minute()); // adjust hour stepper
}
else if (now.hour() <= 12) {
stepper2.step(now.hour() * 60 + now.minute()); // adjust hour stepper
}
// 90-96 control for testing purpose only
Serial.print("Time ");
Serial.print(now.hour());
Serial.print(":");
Serial.print(now.minute());
Serial.print(":");
Serial.print(now.second());
Serial.println("");
}
// startup loop with 12:00:00, 0:00:00 and hourly resets of stepper. Stepper minute increment
void loop()
{
// update of RTC time
DateTime now = rtc.now();
// Reset minute and hour stepper at 12:00:00
if (now.hour() == 12 && now.minute() == 00 && now.second() == 00) {
// minute stepper calibration
do {
val = digitalRead(buttonpin); //read the value of the photointerrupter
if (val == HIGH) // turn on LED when photointerrupter is blocked
{
stepper1.setSpeed(10); // 10 rpm
stepper1.step(-50); // 50 steps from resetpoint
startup = startup + 1;
digitalWrite(Led, HIGH);
}
else
{
stepper1.setSpeed(5); // 5 rpm
stepper1.step(1); // stepping towards photointerrupter
digitalWrite(Led, LOW);
}
} while (startup < 2);
// hour stepper calibration
do {
val = digitalRead(buttonpin); //read the value of the photointerrupter
if (val == HIGH) // turn on LED when photointerrupter is blocked
{
stepper2.setSpeed(10); // 10 rpm
stepper2.step(50); // 50 steps from resetpoint
startup = startup + 1;
digitalWrite(Led, HIGH);
}
else
{
stepper2.setSpeed(5); // 5 rpm
stepper2.step(-1); // stepping towards photointerrupter
digitalWrite(Led, LOW);
}
} while (startup < 4);
startup = 0;
digitalWrite(Led, LOW);
// delay so that event does not repeat
delay(1000);
}
// stepper motor reset at 0:00:00
if (now.hour() == 00 && now.minute() == 00 && now.second() == 00) {
// minute stepper calibration
do {
val = digitalRead(buttonpin); //read the value of the photointerrupter
if (val == HIGH) // turn on LED when photointerrupter is blocked
{
stepper1.setSpeed(10); // 10 rpm
stepper1.step(-50); // 50 steps from resetpoint
startup = startup + 1;
digitalWrite(Led, HIGH);
}
else
{
stepper1.setSpeed(5); // 5 rpm
stepper1.step(1); // stepping towards photointerrupter
digitalWrite(Led, LOW);
}
} while (startup < 2);
// hour stepper calibration
do {
val = digitalRead(buttonpin); //read the value of the photointerrupter
if (val == HIGH) // turn on LED when photointerrupter is blocked
{
stepper2.setSpeed(10); // 10 rpm
stepper2.step(50); // 50 steps from resetpoint
startup = startup + 1;
digitalWrite(Led, HIGH);
}
else
{
stepper2.setSpeed(5); // 5 rpm
stepper2.step(-1); // stepping towards photointerrupter
digitalWrite(Led, LOW);
}
} while (startup < 4);
startup = 0;
digitalWrite(Led, LOW);
// delay so that event does not repeat
delay(1000);
}
// hourly minute stepper reset
if (now.minute() == 0 && now.second() == 0 ) {
do {
val = digitalRead(buttonpin); //read the value of the photointerrupter
if (val == HIGH) // turn on LED when photointerrupter is blocked
{
stepper1.setSpeed(10); // 10 rpm
stepper1.step(-50); // 50 steps from resetpoint
startup = startup + 1;
digitalWrite(Led, HIGH);
}
else
{
stepper1.setSpeed(5); // 5 rpm
stepper1.step(1); // stepping towards photointerrupter
digitalWrite(Led, LOW);
}
} while (startup < 2);
startup = 0;
digitalWrite(Led, LOW);
// delay so that event does nor repeat
delay(1000);
}
// minute stepper one minute increment, hourstepper one minute increment
if (now.second() == 59) {
stepper1.setSpeed(10); // 1 rpm
stepper1.step(-15); // 15 stepps equals one minute
stepper2.setSpeed(10); // 10 rpm
stepper2.step(1); // 1 stepp equals one minute on hour steppper
// delay so that event does not repeat
delay(1000);
}
digitalWrite(Led, LOW);
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments