//#define BLYNK_DEBUG
#define BLYNK_PRINT Serial
#define BLYNK_USE_DIRECT_CONNECT
#include <BlynkSimpleSerialBLE.h>
#include <SPI.h>
#include <Adafruit_BLE.h>
#include <Adafruit_BluefruitLE_SPI.h>
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
char auth[] = "YourAuthToken";
// SHARED SPI SETTINGS (see adafruit webpages for details)
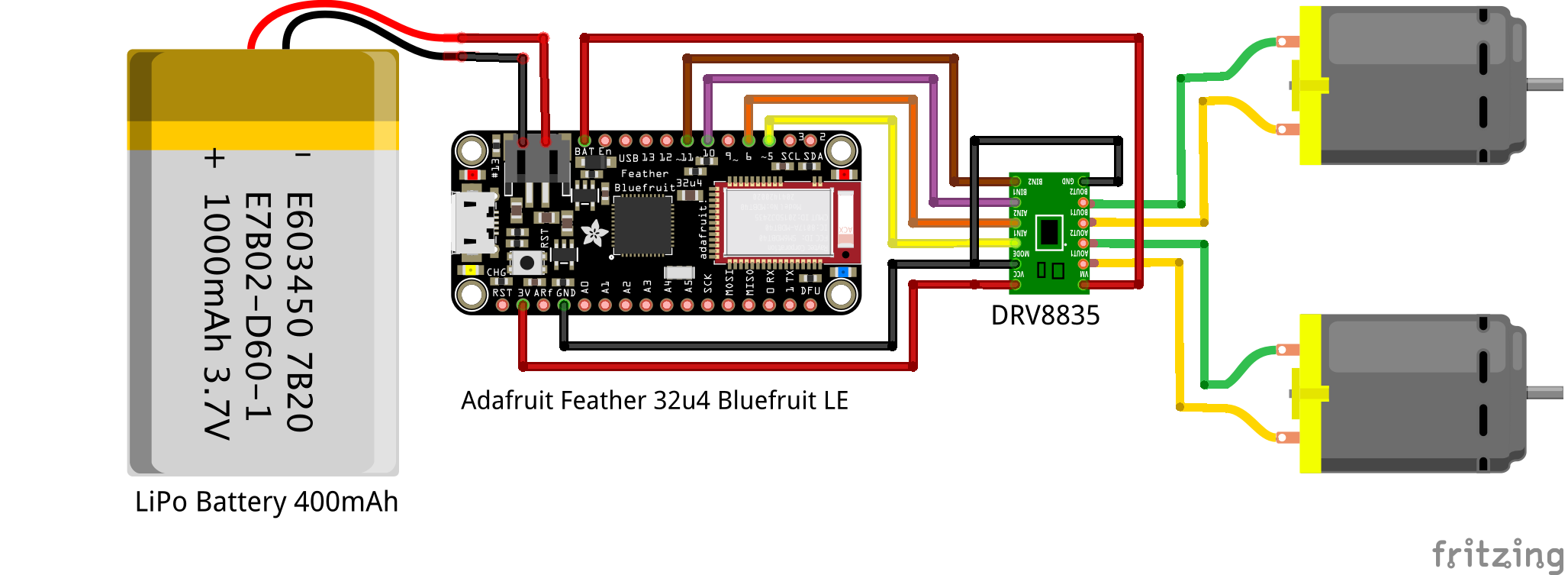
#define BLUEFRUIT_SPI_CS 8
#define BLUEFRUIT_SPI_IRQ 7
#define BLUEFRUIT_SPI_RST 4 // Optional but recommended, set to -1 if unused
#define BLUEFRUIT_VERBOSE_MODE true
// Create ble instance, see pinouts above
Adafruit_BluefruitLE_SPI ble(BLUEFRUIT_SPI_CS, BLUEFRUIT_SPI_IRQ, BLUEFRUIT_SPI_RST);
//pin name
const int forwardL = 11;
const int rearL = 10;
const int forwardR = 5;
const int rearR = 6;
long Speed;
long SpeedL, SpeedR;
BLYNK_WRITE(V0) {
int x = param[0].asFloat();
int y = param[1].asFloat();
x = map(x, -10, 10, 255, -255);
y = map(y, -10, 10, 255, -255);
Serial.print("x: ");
Serial.print(x);
Serial.print(" y: ");
Serial.print(y);
Speed = sqrt(x*x+y*y);
if(Speed > 255){
Speed = 255;
}
Serial.print(" Speed: ");
Serial.println(Speed);
if(y >= 0){
if(x >= 0){
SpeedL = 0;
SpeedR = abs(x);
}else{
SpeedL = abs(x);
SpeedR = 0;
}
analogWrite(forwardL, Speed - SpeedL);
analogWrite(rearL, 0);
analogWrite(forwardR, Speed - SpeedR);
analogWrite(rearR, 0);
}else{
if(x >= 0){
SpeedL = 0;
SpeedR = abs(x);
}else{
SpeedL = abs(x);
SpeedR = 0;
}
analogWrite(forwardL, 0);
analogWrite(rearL, Speed - SpeedL);
analogWrite(forwardR, 0);
analogWrite(rearR, Speed - SpeedR);
}
}
void setup() {
Serial.begin(9600);
ble.begin(BLUEFRUIT_VERBOSE_MODE);
ble.factoryReset(); // Optional
ble.setMode(BLUEFRUIT_MODE_DATA);
Blynk.begin(auth, ble);
}
void loop() {
Blynk.run();
}







{kind=link}
Comments