


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
My father’s hobby is fishing and a couple of months ago he wanted to buy a bait boat as it can be useful and fun during fishing. These boats are very simple machines, so I thought I'll build one. I also realized that it can be much more than just a fishing boat. I can attach all kinds of sensors to a boat to monitor water purity, water temperature, etc. This is how I started this project.
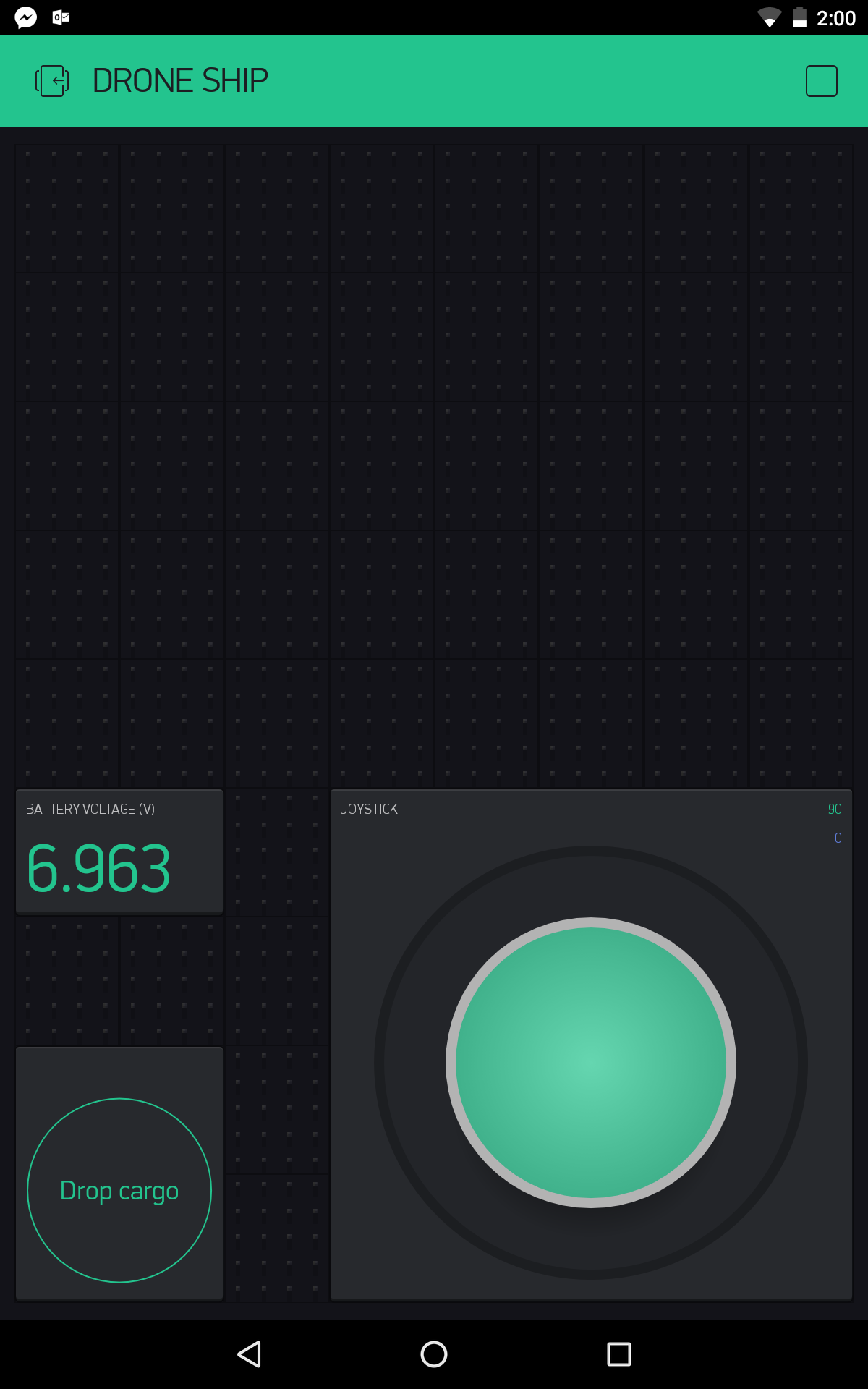
What do we need?For starters, we need a remote controller and a boat. If the limited range of the WiFi connection is not an issue, then I can use a smartphone or tablet as the remote controller. The Blynk application is a great tool for this job. After some experimenting I came up with a simple Blynk project that has all the controllers that I need for this boat.
The boat itself requires at least one motor with a propeller, a servo that opens the doors of the cargo bay and another servo that controls the rudder. It isn’t a difficult setup, and the Sparkfun Blynk Board is a very good option for the controller of the boat. If you don’t have a boat that you can use in this project, then you have to be creative and build one with anything you can use.
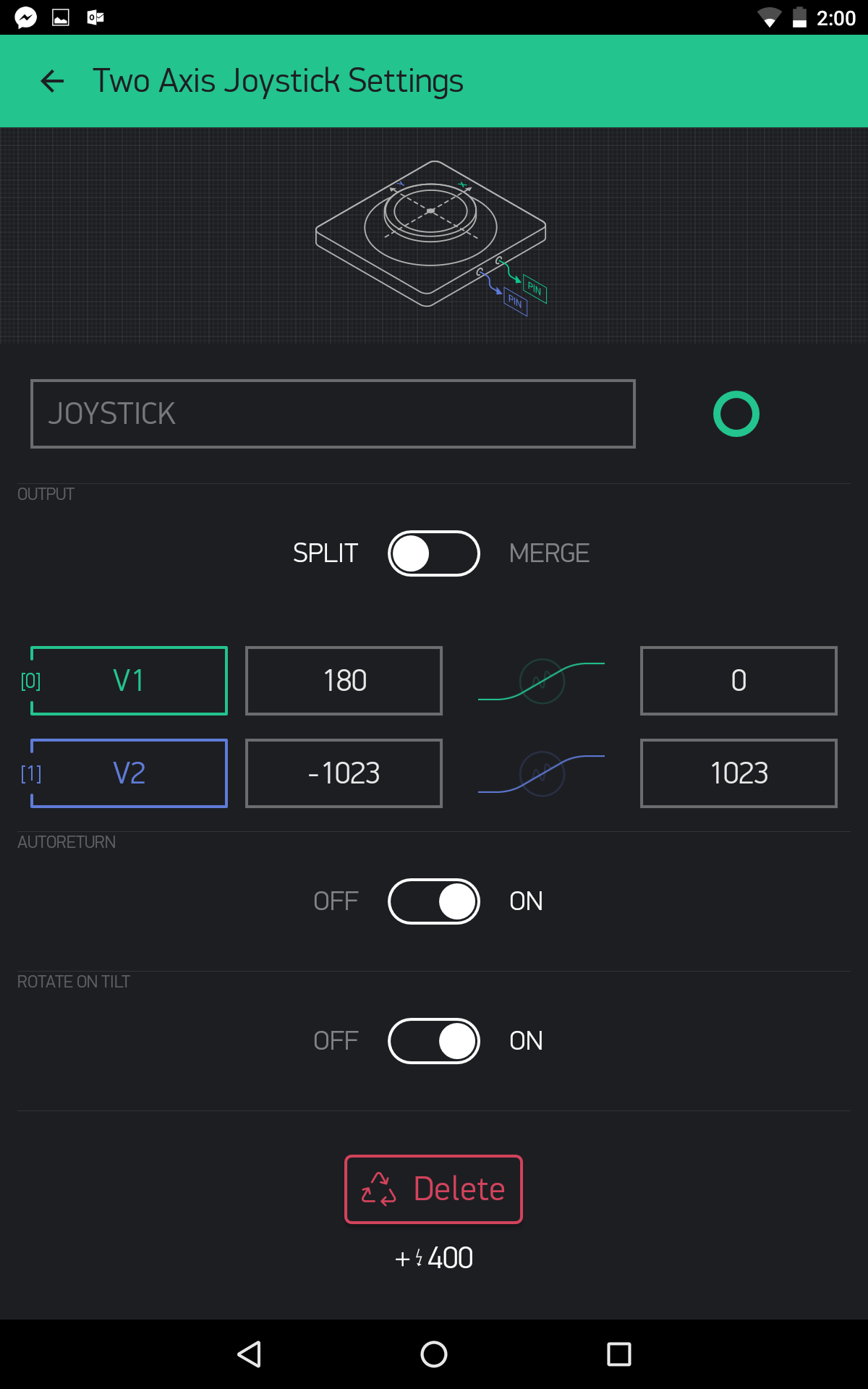
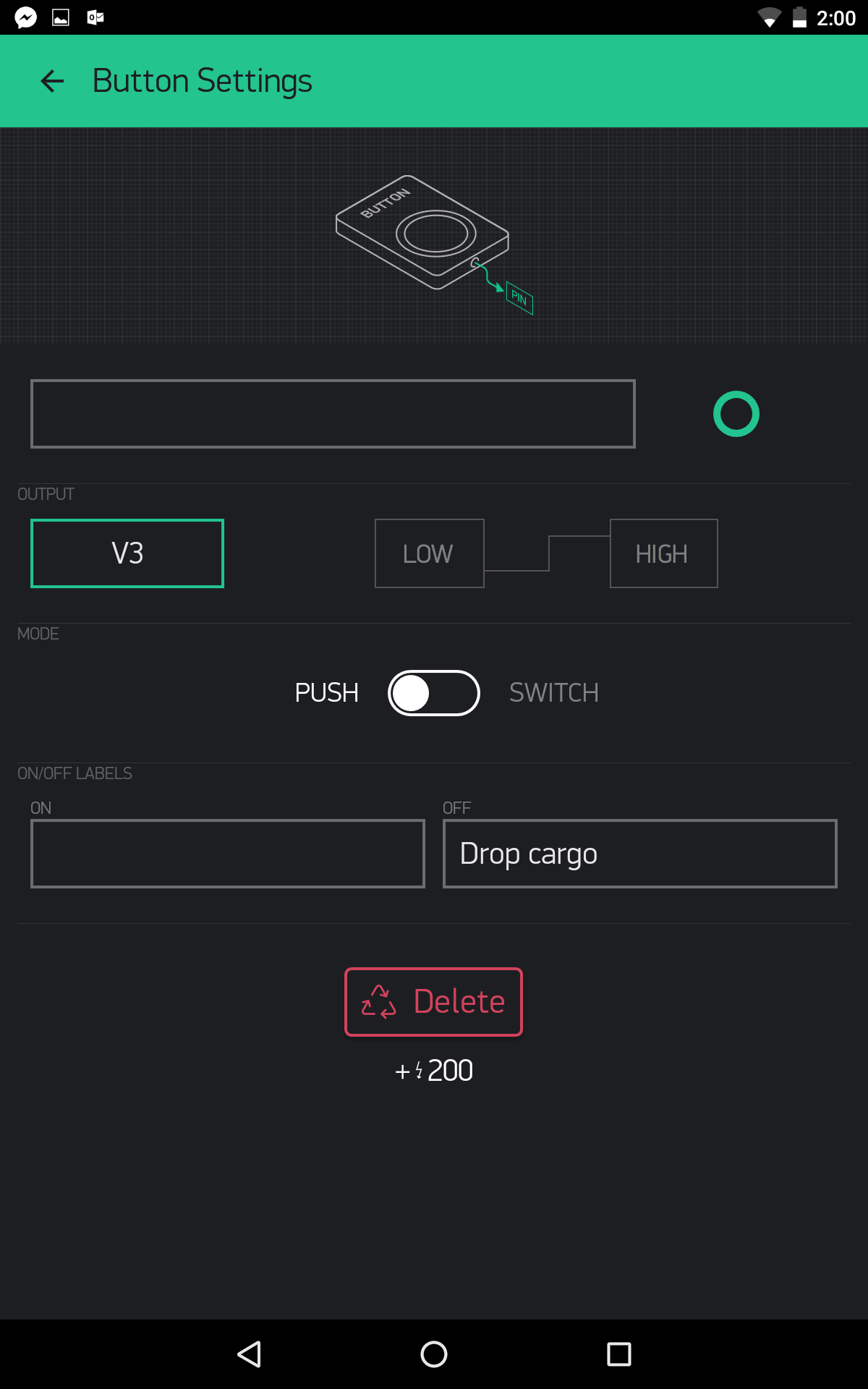
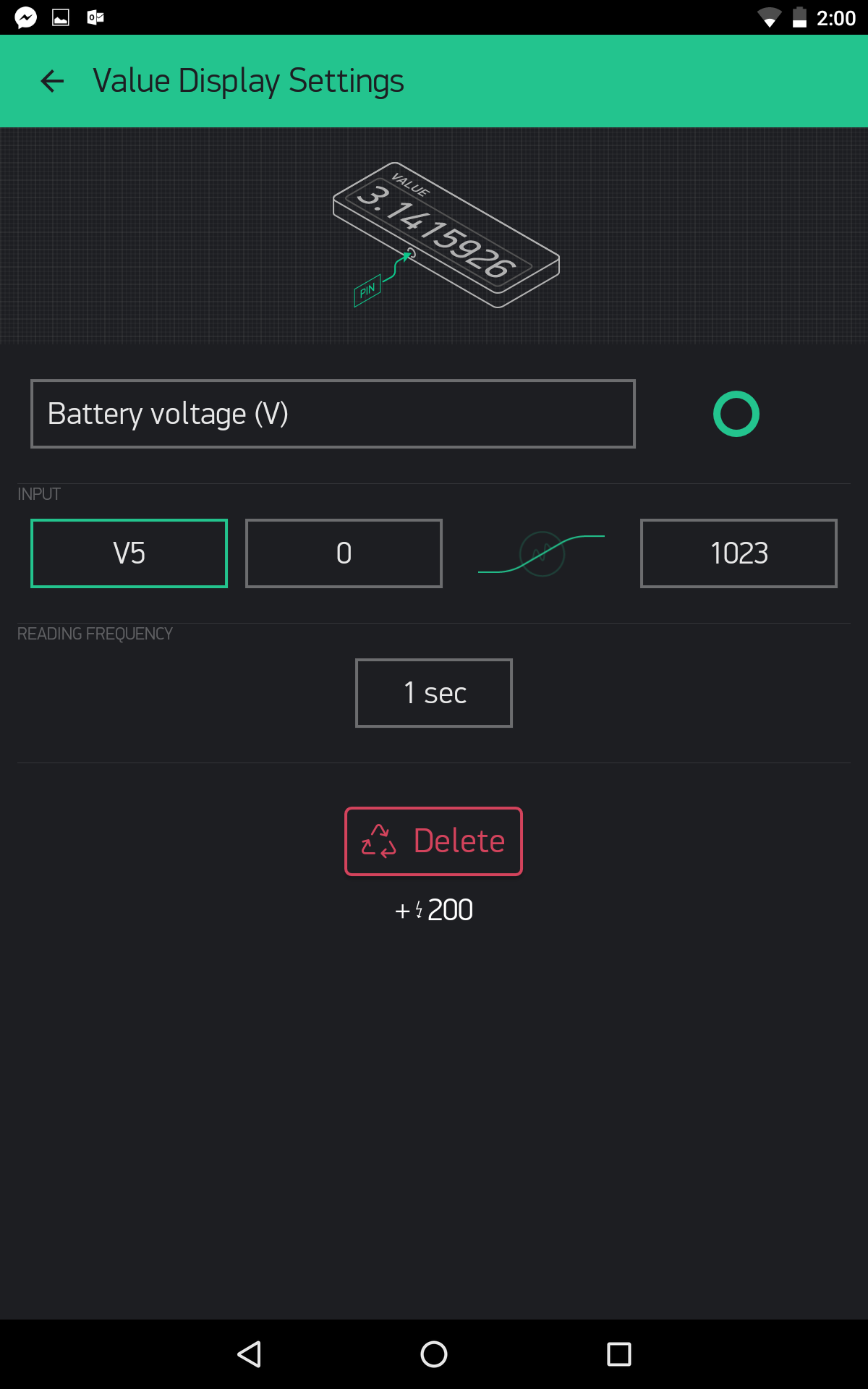
The Blynk appFirstly, you have to download and setup the Blynk application to your phone. After that you need to create a new project, name it, choose your microcontroller (Sparkfun Blynk Board or ESP8266), and save your authentication token. At this point you’ve got an empty project. Click on the add button and add a two axis joystick, a button and a value display to the main screen. I think this setup is easy to understand, but if you need some help with anything, feel free to ask.
The Blynk app is the plus that turns this RC bait boat into a drone, as I can control the boat from anywhere in the world. With additional developing I can even feed the fishes or do daily water quality measurements on a lake, fully automatically.
The Sparkfun Blynk Board / ESP8266 codeI started the project with the Sparkfun Blynk Board, but after a sad accident I had to switch to an ESP8266-201. Both of them are ESP8266-based MCUs, so it doesn’t make any serious difference. I attached the source code for the ESP8266-201 at the code section. Theoretically you can use this source code on the Sparkfun Blynk Board, too but you have to change the SERVO_CARGO_PIN at the beginning from 4 to 0, as you can’t reach GPIO4 on this board, but you’ve got GPIO0.
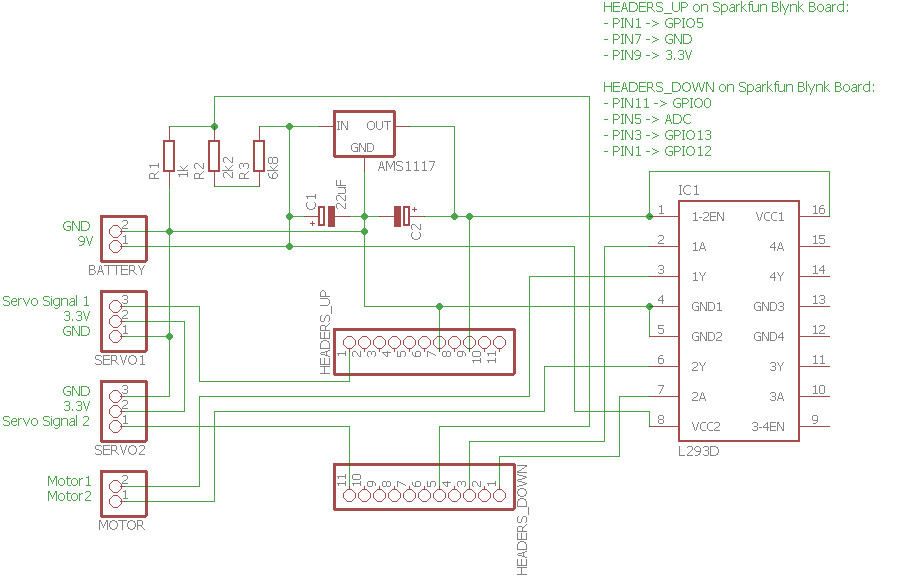
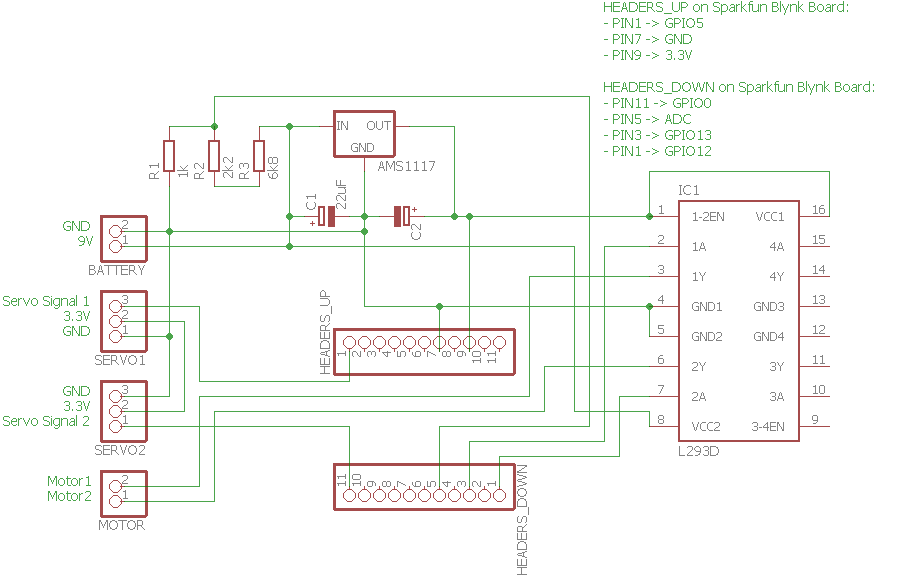
CircuitI soldered every component into a circuit board for the boat. It is easy-to-use, more compact and more reliable than a circuit with a solderless breadboard. The voltage of the battery can be somewhere between 6-9V. The ESP8266’s ADC can measure voltages between 0V and 1V. I’ve got a voltage divider where resistance of R1 is 9k ohm (2k2 + 6k8 ohm) and R2 is 1k ohm.
I am using 6 X 1.5V batteries, so the total voltage is 9V. I will measure 1/10 of the battery’s voltage with the voltage divider, so in the case of fully charged batteries I will get 0.9V. It is in the ADC’s measuring range. I used an AMS1117 3.3V voltage regulator to provide regulated voltage to the ESP8266 and the servos. The boat’s electric motor is controlled via an L293D H-bridge IC. I used female headers for the Sparkfun Blynk Board, and male headers for the power supply, the servos and the motor.
After I switched to ESP8266-201, I had a circuit, that works with the Sparkfun Blynk Board, but not with the ESP201. I built a simple adapter to solve this problem. The ESP201 doesn’t have an USB connector with an FTDI chip, or any other way to connect the microcontroller with a computer, so I also soldered male headers for my serial adapter module and connected it to the ESP201. This way I can use my main board with both ESP8266-201 and Sparkfun Blynk Board.
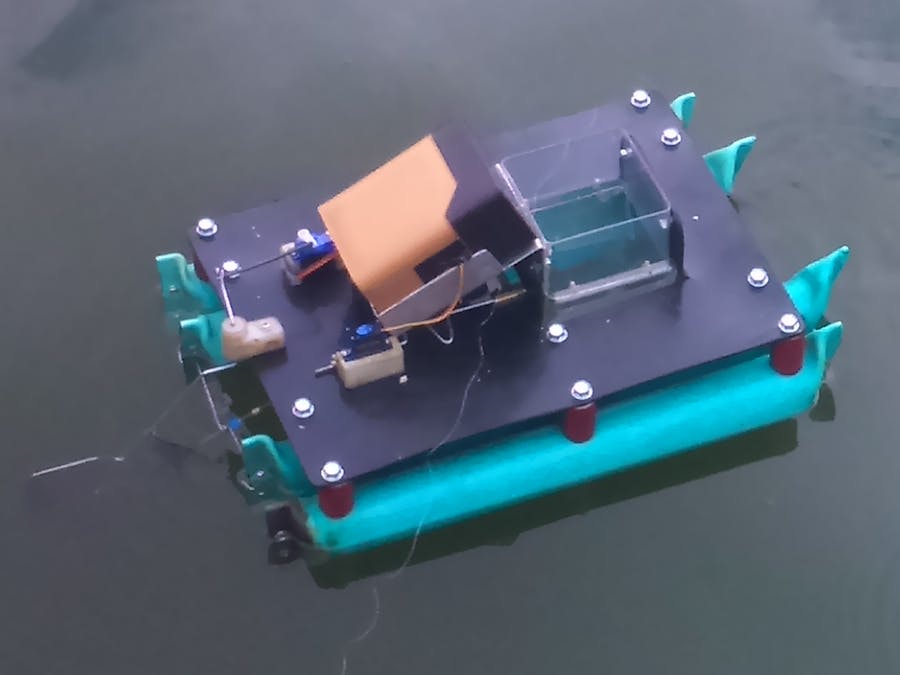
The hullI don’t have much experience in working with tubes, thick plastics, metals or fragile materials, so I worked with my father on the hull. There are numerous ways to make a boat and we chose to build a catamaran. It looks cool, and it stays very stable when I release the cargo. Capsizing shouldn’t be a problem with our setup.
We used everything around the house, that we thought could be handy. I recommend you to look around in your house and see what you can use. Be creative! At first I wanted to use PET bottles as the bottom of the boat, but my father insisted on using something harder, something like his old PVC tubes, so we used those old PVC tubes. He filled the tubes with polyurethane foam, to make them water resistant. The black plastic sheet’s origin is unknown, the cargo bay is made from a cotton swab holder box, the brown and black box was an old coffee holder and the metal sticks were bicycle spokes a couple of weeks ago.
ResultsThe first tests were carried out at home. The boat works nicely, but the shaft of the propeller is quite loud, especially on higher speeds. It shouldn’t be a problem as the water resistance will take care of the high speeds.
Everything looks all right, it is ready for a test on water. I carried out the next test in a lake in the city of Szeged. Fun fact: the name of the lake is Vértó in hungarian, that means Lake Blood in english. The origin of the name is unknown.
I was worried, that some problem occurs, and the boat will stuck in the lake, so I connected a fishing line to the boat. The Blynk app requires internet connection, so I created a WiFi hotspot with my phone and both the ESP8266 and my tablet connected to this network. If I put a mobile WiFi hotspot (with my phone, MiFi, etc) it can work anywhere with network coverage. Thanks to the wifi hotspot there's no need for direct connection between the boat's circuits and an onboard IoT sensor board, so it makes our job even easier. We can easily change the internet connected payload independently from the boat's controlling system.
I had mixed feelings after the test. The rudder worked fine. The cargo bay’s door opened and released the food just as I wanted. The cargo transporting and releasing part can come in handy in numerous cases. On the video I just released food into the water, but it can be anything from monitoring devices to chemicals. The only problem right now is the speed of the boat. It is quite slow. I realized that the boat is too heavy and the motor is just not powerful enough.
Future plansAfter the tests it is clear, that I need to use a more powerful motor and maybe a bigger propeller for this project. I’ll test the thrust of some stronger DC motors and chose one, that is more suitable for this project. Maybe I will use more than one motor on the ship. If nothing is enough I’ll use one of my old 920kV BLDC motors. That'll do the trick. One thing is sure, I need to give more thrust to this boat.
Main board schematics




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments