

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
This project is the start of the brain for a Arduino based rocket.
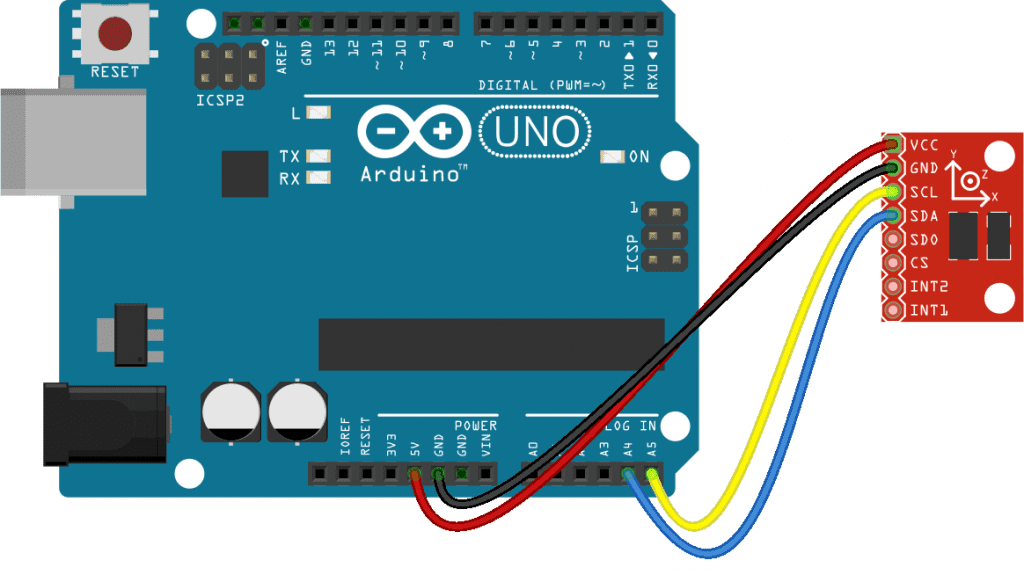
Mounted near the nose cone of the rocket, we need a gyroscope. These are used in rocketry to detect and report back the motion and position of the rocket.
I just wanted to add this because I couldnt find anything exactly to my needs. So enjoy.
We can detect its spin based on the position of axis's of the gyroscope. Lateral spin is what we are interested in. It also detects the vertical angle of the rocket. Allowing us to detect that we are pointing straight up at launch and its tilt along the flight.
It creates a chart for you to monitor in the serial.




{kind=link}
Comments