



Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
_4YUDWziWQ8.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| |||||
| ||||||
 |
| |||||
Me and my friend Alperen Akküncü have been working on an open-source INS/GNSS system for a while. We came up with an open-source INS/GNSS module for implementing various navigation algorithms. Out of the box, It’s shipped with its default algorithm which is discrete architecture loosely coupled EKF/NCF. Pellicanus has castellated pins which makes it easy to integrat into your own projects or you can use the development board to play with algorithms that we provide or your own navigation algorithm.
Recently we started the pre-launch on CrowdSupply. Here is the link to our page if you want to subscribe:
https://www.crowdsupply.com/g-fusion/pellicanus
Pellicanus integrates the following components into a tiny SMD module:
· RP2040 MCU
· ROM
· Barometer
· IMU (gyro and acccelerometer)
· Magnetometer
· GNSS
· Antenna connector
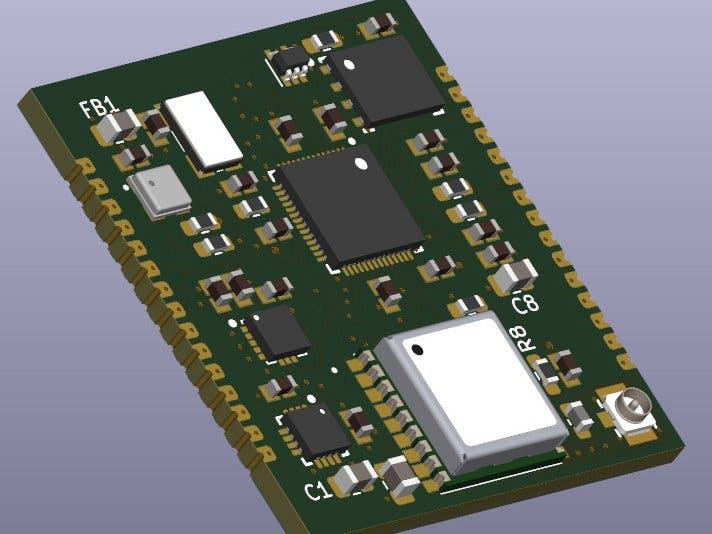
This is 2D KiCAD view of Pellicanus SMD module. Its small size allows you to integrate it into your projects easily.
Features & Specifications
- Accelerometer Meas Range: ±2 g, ±4 g, ±8 g, ±16 g
- Gyro Meas Range: ±250 dps, ±500 dps, ±1000 dps, ±2000 dps
- Mag Meas Range: ±8 gauss
- Operation Temperature: -40°C to +80°C
- Gyro Bias Instability: 7-8°/hr
- Dynamic Heading Accuaricy: ±1°
- Dynamic Pitch/Roll Accuaricy: ±0.1°
- Position Accuaricy: ±4 meters
- Pressure Sensor Meas Range: 300-1200 mbar
- GNSS position, speed and heading correction
The main processor we use is RP2040 from Raspberry pi which can be programmed with C or micropython. We will be providing many micropython scripts fort he ease of development.
Both hardware and software are open-source sysyem. All of the algorithms and KiCAD Project will be shared on out github page. You can either implement your own algorithm or use our algorithm that we provide.
Here are some 3D pics of Pellicanus
This is the development board for pellicanus. It includes qiwiic connector, sdcard interdace, USB connector, various pins and LEDs.
This system is an INS/GNSS module. It gives you the opportunity to implement and test many algorithms. PELLICANUS is a tactical level system. You can program it with the development board and use it with the development board or in your own bardu.
In addition, It has a GUI where you can test many AHRS and some Navigation algorithms and graph them.
This is the old version of pellicanus. We pivoted a little bit because we want pellicanus to be not only a development board for navigation but also for integrating to actual projects!
from machine import Timer,UART,Pin
import machine
import utime
import ustruct
import sys
import uctypes
from ulab import numpy as np
from math import *
##############################
uart1 = UART(0,baudrate = 115200, tx = Pin(12),rx = Pin(13))
##### REGISTER MAP #####
ACCEL_CONFIG = 0x1C
ACCEL_CONFIG2 = 0x1D
GYRO_CONFIG = 0x1B
GYRO_CONFIG2 = 0x1A
SELF_TEST_X_ACCEL = 0x0D
SELF_TEST_Y_ACCEL = 0x0E
SELF_TEST_Z_ACCEL = 0x0F
SELF_TEST_X_GYRO = 0x00
SELF_TEST_Y_GYRO = 0x01
SELF_TEST_Z_GYRO = 0X02
ACCEL_XOUT_H = 0x3B
ACCEL_XOUT_L = 0x3C
ACCEL_YOUT_H = 0x3D
ACCEL_YOUT_L = 0x3E
ACCEL_ZOUT_H = 0x3F
ACCEL_ZOUT_L = 0x40
GYRO_XOUT_H = 0x43
GYRO_XOUT_L = 0x44
GYRO_YOUT_H = 0x45
GYRO_YOUT_L = 0x46
GYRO_ZOUT_H = 0x47
GYRO_ZOUT_L = 0x48
PWR_MGMT_1 = 0x6B
PWR_MGMT_2 = 0x6C
ACCEL_WHO_AM_I = 0x75
GYRO_WHO_AM_I = 0x75
########################
GYRO_cs = machine.Pin(21, machine.Pin.OUT)
ACCEL_cs = machine.Pin(17, machine.Pin.OUT)
# Initialize SPI
spi = machine.SPI(0,
baudrate=1000000,
polarity=1,
phase=1,
bits=8,
firstbit=machine.SPI.MSB,
sck=machine.Pin(18),
mosi=machine.Pin(19),
miso=machine.Pin(20))
def reg_write(spi, cs, reg, data):
"""
Write 1 byte to the specified register.
"""
# Construct message (set ~W bit low, MB bit low)
msg = bytearray()
msg.append(0x00 | reg)
msg.append(data)
# Send out SPI message
cs.value(0)
spi.write(msg)
cs.value(1)
def reg_read(spi, cs, reg, nbytes=1):
"""
Read byte(s) from specified register. If nbytes > 1, read from consecutive
registers.
"""
# Determine if multiple byte (MB) bit should be set
if nbytes < 1:
return bytearray()
elif nbytes == 1:
mb = 0
else:
mb = 1
# Construct message (set ~W bit high)
msg = bytearray()
msg.append(0x80 | (mb << 6) | reg)
# Send out SPI message and read
cs.value(0)
spi.write(msg)
data = spi.read(nbytes)
cs.value(1)
return data
# from stackoverflow J.F. Sebastian
def _twos_comp(val, bits=16):
"""compute the 2's complement of int val with bits"""
if (val & (1 << (bits - 1))) != 0: # if sign bit is set
val = val - (1 << bits) # compute negative value
return val
####ACCEL SET MAX RANGE########################
def ACCEL_set_2g():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG,0x00)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
def ACCEL_set_4g():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG,0x01)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
def ACCEL_set_8g():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG,0x10)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
def ACCEL_set_16g():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG,0x11)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
#####ACCEL SET LOW PASS FLTER#############
def ACCEL_set_5hz():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG2,0x06)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
def ACCEL_set_10hz():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG2,0x05)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
def ACCEL_set_20hz():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG2,0x04)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
def ACCEL_set_40hz():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG2,0x03)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
def ACCEL_set_100hz():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG2,0x02)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
def ACCEL_set_200hz():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG2,0x01)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG2,1)
######GYRO SET MAX RANGE###########
def GYRO_set_250dps():
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
reg_write(spi,GYRO_cs,GYRO_CONFIG,0x00)
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
def GYRO_set_500dps():
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
reg_write(spi,GYRO_cs,GYRO_CONFIG,0x01)
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
def GYRO_set_1000dps():
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
reg_write(spi,GYRO_cs,GYRO_CONFIG,0x10)
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
def GYRO_set_2000dps():
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
reg_write(spi,GYRO_cs,GYRO_CONFIG,0x11)
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
#######GYRO SET LOW PASS FLTER#############
def ACCEL_data():
#################### X axis ############################
dataX = reg_read(spi, ACCEL_cs, ACCEL_XOUT_L, 1)
dataX = dataX + reg_read(spi, ACCEL_cs, ACCEL_XOUT_H, 1)
ax = int.from_bytes(dataX,'little')
ax = _twos_comp(ax)
#################### Y axis ############################
dataY = reg_read(spi, ACCEL_cs, ACCEL_YOUT_L, 1)
dataY = dataY + reg_read(spi, ACCEL_cs, ACCEL_YOUT_H, 1)
ay = int.from_bytes(dataY,'little')
ay = _twos_comp(ay)
#################### Z axis ############################
dataZ = reg_read(spi, ACCEL_cs, ACCEL_ZOUT_L, 1)
dataZ = dataZ + reg_read(spi, ACCEL_cs, ACCEL_ZOUT_H, 1)
az = int.from_bytes(dataZ,'little')
az = _twos_comp(az)
return ax,ay,az
def GYRO_data():
#################### X axis ############################
dataX = reg_read(spi, GYRO_cs, GYRO_XOUT_L, 1)
dataX = dataX + reg_read(spi, GYRO_cs, GYRO_XOUT_H, 1)
wx = int.from_bytes(dataX,'little')
wx = _twos_comp(wx)
#################### Y axis ############################
dataY = reg_read(spi, GYRO_cs, GYRO_YOUT_L, 1)
dataY = dataY + reg_read(spi, GYRO_cs, GYRO_YOUT_H, 1)
wy = int.from_bytes(dataY,'little')
wy = _twos_comp(wy)
#################### Z axis ############################
dataZ = reg_read(spi, GYRO_cs, GYRO_ZOUT_L, 1)
dataZ = dataZ + reg_read(spi, GYRO_cs, GYRO_ZOUT_H, 1)
wz = int.from_bytes(dataZ,'little')
wz = _twos_comp(wz)
return wx,wy,wz
################################ MAHNETOMETER #############################
LIS3MDL_M_ADDRESS = 0x1E
LIS3MDL_WHO_AM_I_M = 0x0F
LIS3MDL_CTRL_REG1_M = 0x20
LIS3MDL_CTRL_REG2_M = 0x21
LIS3MDL_CTRL_REG3_M = 0x22
LIS3MDL_CTRL_REG4_M = 0x23
LIS3MDL_STATUS_REG_M = 0x27
LIS3MDL_OUT_X_L_M = 0x28
LIS3MDL_OUT_X_H_M = 0x29
LIS3MDL_OUT_Y_L_M = 0x2A
LIS3MDL_OUT_Y_H_M = 0x2B
LIS3MDL_OUT_Z_L_M = 0x2C
LIS3MDL_OUT_Z_H_M = 0x2D
LIS3MDL_TEMP_OUT_L_M = 0x2E
LIS3MDL_TEMP_OUT_H_M = 0x2F
LIS3MDL_INT_CFG_M = 0x30
LIS3MDL_INT_SRC_M = 0x31
LIS3MDL_INT_THS_L_M = 0x32
LIS3MDL_INT_THS_H_M = 0x33
LIS3MDL_REG_CTL_1_TEMP_EN = 0x80
LIS3MDL_REG_CTL_2_RESET = 0x04
# mag_scale defines all possible FSR's of the magnetometer:
LIS3MDL_M_SCALE_4GS = 0x20 # 00: 4Gs
LIS3MDL_M_SCALE_8GS = 0x40 # 01: 8Gs
LIS3MDL_M_SCALE_12GS = 0x60 # 10: 12Gs
LIS3MDL_M_SCALE_16GS = 0x60 # 11: 16Gs
# mag_oder defines all possible output data rates of the magnetometer:
LIS3MDL_M_ODR_625 = 0x04 # 6.25 Hz
LIS3MDL_M_ODR_125 = 0x08 # 12.5 Hz
LIS3MDL_M_ODR_25 = 0x0C # 25 Hz
LIS3MDL_M_ODR_5 = 0x10 # 50
LIS3MDL_M_ODR_10 = 0x14 # 10 Hz
LIS3MDL_M_ODR_20 = 0x14 # 20 Hz
LIS3MDL_M_ODR_40 = 0x14 # 40 Hz
LIS3MDL_M_ODR_80 = 0x14 # 80 Hz
mRes = 4.0 / 32768.0 # 4G
SENSITIVITY_OF_MIN_SCALE = 27368.0 # (4 guass scale) * (6842 LSB/guass at 4 guass scale)
Scale = 16
i2c = machine.I2C(0,
scl=machine.Pin(13),
sda=machine.Pin(12),
freq=400000)
###############################################################################
# Functions
def reg_writei2c(i2c, addr, reg, data):
"""
Write bytes to the specified register.
"""
# Construct message
msg = bytearray()
msg.append(data)
# Write out message to register
i2c.writeto_mem(addr, reg, msg)
def reg_readi2c(i2c, addr, reg, nbytes=1):
"""
Read byte(s) from specified register. If nbytes > 1, read from consecutive
registers.
"""
# Check to make sure caller is asking for 1 or more bytes
if nbytes < 1:
return bytearray()
# Request data from specified register(s) over I2C
data = i2c.readfrom_mem(addr, reg, nbytes)
return data
def _twos_comp(val, bits=16):
"""compute the 2's complement of int val with bits"""
if (val & (1 << (bits - 1))) != 0: # if sign bit is set
val = val - (1 << bits) # compute negative value
return val
###############################################################################
def initialise():
# initMag -- Sets up the magnetometer to begin reading.
#User Register Reset Function
reg_writei2c(i2c,LIS3MDL_M_ADDRESS, LIS3MDL_CTRL_REG2_M, LIS3MDL_REG_CTL_2_RESET)
#Temperature Sensor Enabled
reg_writei2c(i2c,LIS3MDL_M_ADDRESS, LIS3MDL_CTRL_REG1_M, LIS3MDL_REG_CTL_1_TEMP_EN )
#Ultra High Performance Mode Selected for XY Axis
reg_writei2c(i2c,LIS3MDL_M_ADDRESS, LIS3MDL_CTRL_REG1_M, 0x60)
#Ultra High Performance Mode Selected for Z Axis
reg_writei2c(i2c,LIS3MDL_M_ADDRESS, LIS3MDL_CTRL_REG4_M, 0x0C)
#Output Data Rate of 80 Hz Selected
reg_writei2c(i2c,LIS3MDL_M_ADDRESS, LIS3MDL_CTRL_REG1_M, 0x1C)
#Continous Conversion Mode,4 wire interface Selected
reg_writei2c(i2c,LIS3MDL_M_ADDRESS, LIS3MDL_CTRL_REG3_M, 0x00)
# 16 guass Full Scale
reg_writei2c(i2c,LIS3MDL_M_ADDRESS, LIS3MDL_CTRL_REG2_M, 0x60)
#Read the magnetometer output registers.
# This will read all six Magnetometer output registers.
# Reading the Magnetometer X-Axis Values from the Register
def readMagx():
Mag_l = reg_readi2c(i2c,LIS3MDL_M_ADDRESS,LIS3MDL_OUT_X_L_M)
Mag_h = reg_readi2c(i2c,LIS3MDL_M_ADDRESS,LIS3MDL_OUT_X_H_M)
Mag_total = (Mag_l[0] | Mag_h[0] <<8)
return Mag_total if Mag_total < 32768 else Mag_total - 65536
# Reading the Magnetometer Y-Axis Values from the Register
def readMagy():
Mag_l = reg_readi2c(i2c,LIS3MDL_M_ADDRESS,LIS3MDL_OUT_Y_L_M)
Mag_h = reg_readi2c(i2c,LIS3MDL_M_ADDRESS,LIS3MDL_OUT_Y_H_M)
Mag_total = (Mag_l[0] | Mag_h[0] <<8)
return Mag_total if Mag_total < 32768 else Mag_total - 65536
# Reading the Magnetometer Z-Axis Values from the Register
def readMagz():
Mag_l = reg_readi2c(i2c,LIS3MDL_M_ADDRESS,LIS3MDL_OUT_Z_L_M)
Mag_h = reg_readi2c(i2c,LIS3MDL_M_ADDRESS,LIS3MDL_OUT_Z_H_M)
Mag_total = (Mag_l[0] | Mag_h[0] <<8)
return Mag_total if Mag_total < 32768 else Mag_total - 65536
################ GNSS ##########################################
gps_module = UART(0,baudrate = 9600, tx = Pin(28), rx = Pin(29))
#Used to Store NMEA Sentences
buff = bytearray(255)
latitude = None
longitude = None
height = None
groundspeed = None
gpsyaw = None
geoidalseperation = None
hemisLon = None
hemisLat = None
ggaFix = False
vtgFix = False
vVFix = False
def gnss(timer2):
global latitude,longitude,height,groundspeed,gpsyaw,geoidalseperation,hemisLon,hemisLat,ggaFix,vtgFix
latitude = None
longitude = None
height = None
groundspeed = None
gpsyaw = None
geoidalseperation = None
hemisLon = None
hemisLat = None
ggaFix = False
vtgFix = False
gps_module.readline()
buff = str(gps_module.readline())
data = buff.split(",")
if data[0] == "b'$GNGGA" and len(data) == 15:
if len(data[2]) != 0 and len(data[4]) != 0 and len(data[9]) != 0 and len(data[11]) != 0:
latitude = data[2]
latdeg = latitude[0:2]
latdeg1 = latitude[2:]
latdeg1 = float(latdeg1)/60
latitude = int(latdeg) + latdeg1
longitude = data[4]
londeg = longitude[0:3]
londeg1 = longitude[3:]
londeg1 = float(londeg1)/60
longitude = int(londeg) + londeg1
height = float(data[9])
#print(latdeg,latdeg1,londeg,londeg1)
hemisLat = data[3]
hemisLon = data[5]
geoidalseperation = float(data[11])
ggaFix = True
if data[0] == "b'$GNVTG" and len(data) == 10:
if len(data[7]) != 0 and len(data[1]) != 0:
groundspeed = float(data[7])
gpsyaw = float(data[1])
vtgFix = True
#print(latitude,hemisLat,longitude,hemisLon,height,geoidalseperation,groundspeed,gpsyaw)
#print(data)
################## TIME STEP ###################
t = 0
deltaT = 0.04
#####################################
axb = 0
ayb = 0
azb = 0
ax = 0
ay = 0
az = 0
wx = 0
wy = 0
wz = 0
Magx = 0
Magy = 0
Magz = 0
step1magx = 0
step1magy = 0
step1magz = 0
bx = 0
by = 0
cmagx = 0
cmagy = 0
cmagz = 0
def IMU_ecompensation():
global axb,ayb,azb,ax,ay,az,wx,wy,wz,Magx,Magy,Magz,step1magx,step1magy,step1magz,cmagx,cmagy,cmagz
axb,ayb,azb = ACCEL_data()
axb=axb/16384
ayb=ayb/16384
azb=azb/16384
axb = axb + 0.008859
ayb = ayb - 0.007039
azb = azb - 0.005115
ax = 0.998103*axb - 0.000179*ayb - 0.000331*azb
ay = -0.000179*axb + 1.001615*ayb + 0.000106*azb
az = -0.000331*axb + 0.000106*ayb + 0.998466*azb
#NED conflict
ay = -ay
az = -az
#GYRO
wx,wy,wz = GYRO_data()
wx = radians((wx/32768)*500)
wy = radians((wy/32768)*500)
wz = radians((-wz/32768)*500)
#NED conflict
wy = -wy
# Mag Read
Magx = ((readMagx())*(Scale/SENSITIVITY_OF_MIN_SCALE))*100
Magy = ((readMagy())*(Scale/SENSITIVITY_OF_MIN_SCALE))*100
Magz = ((readMagz())*(Scale/SENSITIVITY_OF_MIN_SCALE))*100
#NED conflict
Magz = -Magz
Magy = -Magy
step1magx = (Magx - (-55.256433))
step1magy = (Magy - (-4.367858))
step1magz = (Magz - (9.826686))
cmagx = step1magx*1.301028 + step1magy*-0.046316 + step1magz*0.014783
cmagy = step1magx*-0.046316 + step1magy*1.282879 + step1magz*-0.033587
cmagz = step1magx*0.014783 + step1magy*-0.033587 + step1magz*1.348008
################## AHRS ###################
gyro_quaternion = np.array([[0],
[0],
[0],
[0]],dtype = np.float)
ma_quaternion = np.array([[0],
[0],
[0],
[0]],dtype = np.float)
omega = np.array([[0,0,0,0],
[0,0,0,0],
[0,0,0,0],
[0,0,0,0]],dtype=np.float)
pitch = 0
roll = 0
yaw = 0
pitch_rd = 0
roll_rd = 0
yaw_rd = 0
bx = 0
by = 0
qw = 0
qx = 0
qy = 0
qz = 0
dcm = np.array([[0,0,0],
[0,0,0],
[0,0,0]],dtype = np.float)
alfa = 0.1
def euler2qua():
global pitch_rd,roll_rd,yaw_rd,qw,qx,qy,qz
p = pitch_rd/2
r = roll_rd/2
y = yaw_rd/2
qw = cos(r)*cos(p)*cos(y) + sin(r)*sin(p)*sin(y)
qx = sin(r)*cos(p)*cos(y) - cos(r)*sin(p)*sin(y)
qy = cos(r)*sin(p)*cos(y) + sin(r)*cos(p)*sin(y)
qz = cos(r)*cos(p)*sin(y) - sin(r)*sin(p)*cos(y)
def qua2euler():
global pitch_rd,roll_rd,yaw_rd,qw,qx,qy,qz
roll_rd = atan2((2*(qw*qx + qy*qz)),(1-2*qx*qx - 2*qy*qy))
pitch_rd = asin(2*(qw*qy - qx*qz))
yaw_rd = atan2((2*(qw*qz + qx*qy)),(1- 2*qy*qy - 2*qz*qz))
def AHRS():
global t,pitch,pitch_rd,roll,roll_rd,yaw,yaw_rd,ax,ay,az,wx,wy,wz,dcm,bx,by,cmagx,cmagy,cmagz,qw,qx,qy,qz,deltaT,alfa,gyro_quaternion,ma_quaternion,omega
pitch_rd = atan(ax/((ay*ay + az*az)**0.5))
#pitch_rd = -asin(-ax)
roll_rd = atan2(-ay,-az)
bx = cmagx*cos(pitch_rd)+cmagy*sin(pitch_rd)*sin(roll_rd)+cmagz*sin(pitch_rd)*cos(roll_rd)
by = cmagy*cos(roll_rd) - cmagz*sin(roll_rd)
yaw_rd = atan2(-by,bx) + 0.09843
#print(degrees(pitch_rd),degrees(roll_rd),degrees(yaw_rd))
d = deltaT/2
if t<1:
euler2qua()
else:
gyro_quaternion = np.array([[qw-d*wx*qx-d*wy*qy-d*wz*qz],
[qx+d*wx*qw-d*wy*qz+d*wz*qy],
[qy+d*wx*qz+d*wy*qw-d*wz*qx],
[qz-d*wx*qy+d*wy*qx+d*wz*qw]],dtype=np.float)*(1-alfa)
euler2qua()
ma_quaternion = np.array([[qw],
[qx],
[qy],
[qz]],dtype=np.float)*(alfa)
quat = gyro_quaternion + ma_quaternion
qw = quat[0][0]
qx = quat[1][0]
qy = quat[2][0]
qz = quat[3][0]
qnorm = qw*qw + qx*qx + qy*qy + qz*qz
qw = qw/qnorm
qx = qx/qnorm
qy = qy/qnorm
qz = qz/qnorm
qua2euler()
roll = degrees(roll_rd)
pitch = degrees(pitch_rd)
yaw = degrees(yaw_rd)
dcm = np.array([[(qw*qw + qx*qx - qy*qy -qz*qz),(2*(qx*qy - qz*qw)),(2*(qx*qz + qy*qw))],
[(2*(qx*qy + qz*qw)),(qw*qw - qx*qx + qy*qy -qz*qz),(2*(qy*qz - qx*qw))],
[(2*(qx*qz - qy*qw)),(2*(qy*qz + qx*qw)),(qw*qw - qx*qx -qy*qy + qz*qz)]],dtype=np.float)
################### EKF ##################
gravity = np.array([[0],
[0],
[-1]],dtype = np.int8)
estState = np.array([[0],
[0],
[0],
[0],
[0],
[0]],dtype = np.float)
corState = np.array([[0],
[0],
[0],
[0],
[0],
[0]],dtype = np.float)
estP = np.eye(6,dtype = np.float)*50
corrP = np.eye(6,dtype = np.float)
F = np.array([[1,0,0,0,0,0],
[0,1,0,0,0,0],
[0,0,1,0,0,0],
[0,0,0,1,0,0],
[0,0,0,0,1,0],
[0,0,0,0,0,1]],dtype = np.float)
Rgga = np.eye(3)*0.025
Rvtg = np.eye(2)*0.05
RvV = np.eye(1)*0.05
R = None
noise = np.array([[2.81e-13],
[2.81e-13],
[2.81e-13],
[7.03e-10],
[7.03e-10],
[7.03e-10]],dtype = np.float)
#Qt = np.dot(np.eye(6),noise)
Qt = np.eye(6)*0.1
Hgga = np.array([[1,0,0,0,0,0],
[0,1,0,0,0,0],
[0,0,1,0,0,0]],dtype = np.int8)
Hvtg = np.array([[0,0,0,1,0,0],
[0,0,0,0,1,0]],dtype = np.int8)
HvV = np.array([[0,0,0,0,0,1]],dtype = np.int8)
H = None
kG = np.eye(6,dtype=np.float)
Z = np.array([[0],
[0],
[0]],dtype = np.float)
Vt = np.array([[0],
[0],
[0]],dtype = np.float)
accnoise = 86e-4
posnoiseconst = accnoise*deltaT*deltaT
velnoiseconst = accnoise*deltaT
NEDpos = np.array([[0],
[0],
[0]],dtype = np.float)
NEDvel = np.array([[0],
[0],
[0]],dtype = np.float)
a = np.array([[0],
[0],
[0]],dtype = np.float)
mNEDX = 0
mNEDY = 0
mNEDZ = 0
mNVELX = 0
mNVELY = 0
vVelocity = 0
estimating = np.array([[0],
[0],
[0]],dtype = np.float)
def estimatingState():
global ax,ay,az,a,dcm,deltaT,estState,corState,posnoiseconst,velnoiseconst,NEDpos,NEDvel
a = np.array([[ax],
[ay],
[az]],dtype = np.float)
pnoise = np.array([[posnoiseconst],
[posnoiseconst],
[posnoiseconst]],dtype = np.float)
vnoise = np.array([[velnoiseconst],
[velnoiseconst],
[velnoiseconst]],dtype = np.float)
pnoise = - np.dot(dcm,pnoise)
vnoise = - np.dot(dcm,vnoise)
NEDpos = np.array([[corState[0][0]],
[corState[1][0]],
[corState[2][0]]],dtype = np.float)
NEDvel = np.array([[corState[3][0]],
[corState[4][0]],
[corState[5][0]]],dtype = np.float)
NEDpos = NEDpos + NEDvel*deltaT + pnoise
step1 = np.dot(dcm,a)
step2 = (step1-gravity)*9.81*deltaT
NEDvel = NEDvel + step2 + vnoise
estState = np.array([[NEDpos[0][0]],
[NEDpos[1][0]],
[NEDpos[2][0]],
[NEDvel[0][0]],
[NEDvel[1][0]],
[NEDvel[2][0]]],dtype = np.float)
def estimatingCovarianceMatrix():
global corrP,F,Qt,estP
Ftr = F.transpose()
step1 = np.dot(F,corrP)
step2 = np.dot(step1,Ftr)
estP = step2 + Qt
def kalmangain():
global H,estP,R,kG
Htr = H.transpose()
step1 = np.dot(H,estP)
step2 = np.dot(step1,Htr)
step3 = step2 + R
step4 = np.linalg.inv(step3)
step5 = np.dot(estP,Htr)
kG = np.dot(step5,step4)
def correctionState():
global estState,kG,Vt,corState
step1 = np.dot(kG,Vt)
corState = estState - step1
def correctionP():
global estP,kG,H,corrP
step1 = np.dot(kG,H)
step2 = np.dot(step1,estP)
corrP = estP - step2
def EKF():
global t,ax,ay,az,dcm,gravity,estState,corState,estP,corrP,F,R,Rgga,Rvtg,Qt,H,Hgga,Hvtg,kG,Z,Vt,ggaFix,vtgFix,mNEDX,mNEDY,mNEDZ,mNVELX,mNVELY,estimating,vVFix,HvV,RvV,vVelocity
if ggaFix:
R = Rgga
H = Hgga
Z = np.array([[mNEDX],
[mNEDY],
[mNEDZ]],dtype = np.float)
estimating = np.array([[estState[0][0]],
[estState[1][0]],
[estState[2][0]]],dtype = np.float)
Vt = estimating - Z
kalmangain()
correctionState()
correctionP()
ggaFix = False
vVFix = True
elif vtgFix:
R = Rvtg
H = Hvtg
Z = np.array([[mNVELX],
[mNVELY]],dtype = np.float)
estimating = np.array([[estState[3][0]],
[estState[4][0]]],dtype = np.float)
Vt = estimating - Z
kalmangain()
correctionState()
correctionP()
vtgFix = False
elif vVFix and vVelocity<10 and ggaFix == False:
R = RvV
H = HvV
Z = np.array([[vVelocity]],dtype = np.float)
estimating = np.array([estState[5][0]],dtype = np.float)
Vt = estimating-Z
kalmangain()
correctionState()
correctionP()
vVFix = False
else:
corState = estState
corrP = estP
estimatingState()
estimatingCovarianceMatrix()
################# COORDINATE TRANSFORMATION ####################
#WGS 84 ellipsoid model
Rea = 6378137 #The semi major axis (meters)
Reb = 6356752 #The semi-minor axis (meters)
e = 0.08181919 #The first eccentricity
ee = e*e
en = 1-ee
eSqrt = 0.99330562
Rea_eSqrt = Rea*eSqrt
Me = None #Meridian Radius
Ne = None #Vertical Radius
#############################
ECEF = np.array([[0],
[0],
[0]],dtype = np.float)
Xecef = None
Yecef = None
Zecef = None
referanceNED = False
referanceLat = None
referanceLon = None
referanceECEF = np.array([[0],
[0],
[0]],dtype = np.float)
referanceECEFX = None
referanceECEFY = None
referanceECEFZ = None
NED = np.array([[0],
[0],
[0]],dtype = np.float)
Xned = None
Yned = None
Zned = None
Xvel = None
Yvel = None
Zvel = None
ecef_ned = np.array([[0,0,0],
[0,0,0],
[0,0,0]],dtype = np.float)
ned_ecef = np.array([[0,0,0],
[0,0,0],
[0,0,0]],dtype = np.float)
clongitude = 0
clatitude = 0
cheight = 0
h0 = 0
h1 = 0
pTime = 0
cTime = 0
aralik = 0
def coordinateTransformation(timer):
global t,ax,ay,az,ggaFix,vtgFix,corState,pitch,roll,yaw,aralik,clongitude,clatitude,cheight,mNEDX,mNEDY,mNEDZ,mNVELX,mNVELY,latitude,longitude,height,geoidalseperation,hemisLon,hemisLat,groundspeed,gpsyaw,Rea,Reb,ee,en,eSqrt,Rea_eSqrt,Me,Ne,ECEF,Xecef,Yecef,Zecef,NED,Xned,Yned,Zned,referanceNED,referanceLat,referanceLon,referanceECEF,referanceECEFX,referanceECEFY,referanceECEFZ,ned_ecef,ecef_ned,Xvel,Yvel,Zvel,h0,h1,pTime,cTime,vVelocity
gnssFix = "No_GNSS!!!!"
isStart = "No_Started"
correct = "No_Correct"
IMU_ecompensation()
AHRS()
if t >= 50:
if ggaFix:
if hemisLat == "S":
latitude = -latitude
if hemisLon == "W":
longitude = -longitude
lat = radians(latitude)
lon = radians(longitude)
step1 = 1- ee*(sin(lat)**2)
Me = Rea_eSqrt/(step1**1.5)
Ne = Rea/(step1**0.5)
Xecef = (Ne+height)*cos(lat)*cos(lon)
Yecef = (Ne+height)*cos(lat)*sin(lon)
Zecef = (Ne*eSqrt+height)*sin(lat)
ECEF = np.array([[Xecef],
[Yecef],
[Zecef]],dtype = np.float)
if referanceNED == False:
referanceLat = lat
referanceLon = lon
referanceECEFX = Xecef
referanceECEFY = Yecef
referanceECEFZ = Zecef
ecef_ned = np.array([[(-sin(lat)*cos(lon)),(-sin(lat)*sin(lon)),(cos(lat))],
[(-sin(lon)),(cos(lon)),0],
[(-cos(lat)*cos(lon)),(-cos(lat)*sin(lon)),(-sin(lat))]],dtype = np.float)
ned_ecef = ecef_ned.transpose()
referanceECEF = np.array([[referanceECEFX],
[referanceECEFY],
[referanceECEFZ]],dtype = np.float)
referanceNED = True
step2 = ECEF - referanceECEF
NED = np.dot(ecef_ned,step2)
mNEDX = NED[0][0]
mNEDY = NED[1][0]
mNEDZ = NED[2][0]
gnssFix = "GNSS_FIX!!!"
correct = "Position!!"
h1 = mNEDZ
cTime = t
if pTime == 0:
h1 = h0
pTime = cTime
...
This file has been truncated, please download it to see its full contents.
from machine import Timer
import utime
import ustruct
import sys
import uctypes
from ulab import numpy as np
from ulab import scipy as sc
import math
##### REGISTER MAP #####
ACCEL_CONFIG = 0x1C
GYRO_CONFIG = 0x1B
SELF_TEST_X_ACCEL = 0x0D
SELF_TEST_Y_ACCEL = 0x0E
SELF_TEST_Z_ACCEL = 0x0F
SELF_TEST_X_GYRO = 0x00
SELF_TEST_Y_GYRO = 0x01
SELF_TEST_Z_GYRO = 0X02
ACCEL_XOUT_H = 0x3B
ACCEL_XOUT_L = 0x3C
ACCEL_YOUT_H = 0x3D
ACCEL_YOUT_L = 0x3E
ACCEL_ZOUT_H = 0x3F
ACCEL_ZOUT_L = 0x40
GYRO_XOUT_H = 0x43
GYRO_XOUT_L = 0x44
GYRO_YOUT_H = 0x45
GYRO_YOUT_L = 0x46
GYRO_ZOUT_H = 0x47
GYRO_ZOUT_L = 0x48
PWR_MGMT_1 = 0x6B
PWR_MGMT_2 = 0x6C
ACCEL_WHO_AM_I = 0x75
GYRO_WHO_AM_I = 0x75
########################
GYRO_cs = machine.Pin(21, machine.Pin.OUT)
ACCEL_cs = machine.Pin(17, machine.Pin.OUT)
timer = Timer()
# Initialize SPI
spi = machine.SPI(0,
baudrate=1000000,
polarity=1,
phase=1,
bits=8,
firstbit=machine.SPI.MSB,
sck=machine.Pin(18),
mosi=machine.Pin(19),
miso=machine.Pin(20))
def reg_write(spi, cs, reg, data):
"""
Write 1 byte to the specified register.
"""
# Construct message (set ~W bit low, MB bit low)
msg = bytearray()
msg.append(0x00 | reg)
msg.append(data)
# Send out SPI message
cs.value(0)
spi.write(msg)
cs.value(1)
def reg_read(spi, cs, reg, nbytes=1):
"""
Read byte(s) from specified register. If nbytes > 1, read from consecutive
registers.
"""
# Determine if multiple byte (MB) bit should be set
if nbytes < 1:
return bytearray()
elif nbytes == 1:
mb = 0
else:
mb = 1
# Construct message (set ~W bit high)
msg = bytearray()
msg.append(0x80 | (mb << 6) | reg)
# Send out SPI message and read
cs.value(0)
spi.write(msg)
data = spi.read(nbytes)
cs.value(1)
return data
# from stackoverflow J.F. Sebastian
def _twos_comp(val, bits=16):
"""compute the 2's complement of int val with bits"""
if (val & (1 << (bits - 1))) != 0: # if sign bit is set
val = val - (1 << bits) # compute negative value
return val
def ACCEL_set_2g():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG,0x00)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
def ACCEL_set_4g():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG,0x08)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
def ACCEL_set_8g():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG,0x10)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
def ACCEL_set_16g():
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
reg_write(spi,ACCEL_cs,ACCEL_CONFIG,0x18)
reg = reg_read(spi,ACCEL_cs,ACCEL_CONFIG,1)
def GYRO_set_250dps():
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
reg_write(spi,GYRO_cs,GYRO_CONFIG,0x00)
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
def GYRO_set_500dps():
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
reg_write(spi,GYRO_cs,GYRO_CONFIG,0x10)
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
def GYRO_set_1000dps():
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
reg_write(spi,GYRO_cs,GYRO_CONFIG,0x08)
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
def GYRO_set_2000dps():
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
reg_write(spi,GYRO_cs,GYRO_CONFIG,0x18)
reg = reg_read(spi,GYRO_cs,GYRO_CONFIG,1)
def ACCEL_data():
#################### X axis ############################
dataX = reg_read(spi, ACCEL_cs, ACCEL_XOUT_L, 1)
dataX = dataX + reg_read(spi, ACCEL_cs, ACCEL_XOUT_H, 1)
ax = int.from_bytes(dataX,'little')
ax = _twos_comp(ax)
#################### Y axis ############################
dataY = reg_read(spi, ACCEL_cs, ACCEL_YOUT_L, 1)
dataY = dataY + reg_read(spi, ACCEL_cs, ACCEL_YOUT_H, 1)
ay = int.from_bytes(dataY,'little')
ay = _twos_comp(ay)
#################### Z axis ############################
dataZ = reg_read(spi, ACCEL_cs, ACCEL_ZOUT_L, 1)
dataZ = dataZ + reg_read(spi, ACCEL_cs, ACCEL_ZOUT_H, 1)
az = int.from_bytes(dataZ,'little')
az = _twos_comp(az)
return ax,ay,az
def GYRO_data():
#################### X axis ############################
dataX = reg_read(spi, GYRO_cs, GYRO_XOUT_L, 1)
dataX = dataX + reg_read(spi, GYRO_cs, GYRO_XOUT_H, 1)
wx = int.from_bytes(dataX,'little')
wx = _twos_comp(wx)
#################### Y axis ############################
dataY = reg_read(spi, GYRO_cs, GYRO_YOUT_L, 1)
dataY = dataY + reg_read(spi, GYRO_cs, GYRO_YOUT_H, 1)
wy = int.from_bytes(dataY,'little')
wy = _twos_comp(wy)
#################### Z axis ############################
dataZ = reg_read(spi, GYRO_cs, GYRO_ZOUT_L, 1)
dataZ = dataZ + reg_read(spi, GYRO_cs, GYRO_ZOUT_H, 1)
wz = int.from_bytes(dataZ,'little')
wz = _twos_comp(wz)
return -wx,-wy,-wz
def run():
ax,ay,az = ACCEL_data()
wx,wy,wz = GYRO_data()
print((ax/8192),",",(ay/8192),",",(az/8192),",",((wx/32768)*250),",",((wy/32768)*250),",",((wz/32768)*250))
pitch = 0
roll = 0
yaw = 0
estQuaternion = np.array([[0],
[1],
[2],
[3]],dtype=np.float)
corrQuaternion = np.array([[0],
[0],
[0],
[0]],dtype=np.float)
estP = np.array([[1,0,0,0],
[0,1,0,0],
[0,0,1,0],
[0,0,0,1]],dtype=np.float)*50
corrP = np.array([[1,0,0,0],
[0,1,0,0],
[0,0,1,0],
[0,0,0,1]],dtype=np.float)
R = np.array([[0.00095,0,0],
[0,0.00095,0],
[0,0,0.00095]],dtype=np.float)
Qt = np.array([[0,0,0,0],
[0,0,0,0],
[0,0,0,0],
[0,0,0,0]],dtype=np.float)
Ew = np.array([[0.0087,0,0],
[0,0.0087,0],
[0,0,0.0087]],dtype=np.float)
hqt = np.array([[0],
[0],
[0]],dtype=np.float)
Hqt = np.array([[0,0,0,0],
[0,0,0,0],
[0,0,0,0]],dtype=np.float)
F = np.array([[0,0,0,0],
[0,0,0,0],
[0,0,0,0],
[0,0,0,0]],dtype=np.float)
KalmanGain = np.array([[0,0,0],
[0,0,0],
[0,0,0],
[0,0,0]],dtype=np.float)
Vt = np.array([[0],
[0],
[0]],dtype=np.float)
Zt = np.array([[0],
[0],
[0]],dtype=np.float)
axb = 0 #g
ayb = 0 #g
azb = 0 #g
axc = 0 #g
ayc = 0 #g
azc = 0 #g
wxb = 0 #deg/s
wyb = 0 #deg/s
wzb = 0 #deg/s
wxc = 0 #deg/s
wyc = 0 #deg/s
wzc = 0 #deg/s
topax = 0
topay = 0
topaz = 0
topwx = 0
topwy = 0
topwz = 0
deltaT = 0.01 #second
timeStep = 1 #unit
time = 0 #second
frequency = 100 #hertz
def initialize(ax,ay,az):#kullanld
global estQuaternion
estQuaternion = np.array([[((az+1)/2)**0.5],
[-(ay/((2*(az+1))**0.5))],
[(ax/((2*(az+1))**0.5))],
[0]],dtype=np.float)
def estQua():#kullanld
global estQuaternion,corrQuaternion,wxc,wyc,wzc,deltaT
ident = np.eye(4)
omega = np.array([[0,-wxc,-wyc,-wzc],
[wxc,0,wzc,-wyc],
[wyc,-wzc,0,wxc],
[wzc,wyc,-wxc,0]],dtype=np.float)*(deltaT/2)
step1 = ident + omega
estQuaternion = np.dot(step1,estQuaternion)
def estCovarianceMatrix():#kullanld
global F,corrP,Qt,estP
Ftr = F.transpose()
step1 = np.dot(corrP,Ftr)
step2 = np.dot(F,step1)
estP = step2 + Qt
def transitionMatrix():#kullanld
global wxc,wyc,wzc,deltaT,F
ident = np.eye(4)
omega = np.array([[0,-wxc,-wyc,-wzc],
[wxc,0,wzc,-wyc],
[wyc,-wzc,0,wxc],
[wzc,wyc,-wxc,0]],dtype=np.float)*(deltaT/2)
F = ident + omega
def processNoiseCovarianceMatrix():#kullanld
global estQuaternion,deltaT,Qt,Ew
qw = estQuaternion[0][0]
qx = estQuaternion[1][0]
qy = estQuaternion[2][0]
qz = estQuaternion[3][0]
Wt = np.array([[-qx,-qy,-qz],
[qw,-qz,qy],
[qz,qw,-qx],
[-qy,qx,qw]],dtype=np.float)*(deltaT/2)
Wtr = Wt.transpose()
step1 = np.dot(Ew,Wtr)
Qt = np.dot(Wt,step1)
def measModel():#kullanld
global hqt,estQuaternion,Hqt
qw = estQuaternion[0][0]
qx = estQuaternion[1][0]
qy = estQuaternion[2][0]
qz = estQuaternion[3][0]
hqt = np.array([[qx*qz-qw*qy],
[qw*qx+qy*qz],
[0.5-qx**2-qy**2]],dtype = np.float)*2
Hqt = np.array([[-qy,qz,-qw,qx],
[qx,qw,qz,qy],
[0,-2*qx,2*qy,0]],dtype = np.float)*2
def kalmangain():#kullanld
global Hqt,estP,R,KalmanGain
Htr = Hqt.transpose()
step1 = np.dot(estP,Htr)
step2 = np.dot(Hqt,step1)
S = step2+R
step3 = np.linalg.inv(S)
step4 = np.dot(Htr,step3)
KalmanGain = np.dot(estP,step4)
def correctedQuaternion():#kullanld
global estQuaternion,KalmanGain,Vt,corrQuaternion
step1 = np.dot(KalmanGain,Vt)
corrQuaternion = estQuaternion+step1
def correctedCovarianceMatrix():#kullanld
global KalmanGain,corrP,estP,Hqt
ident = np.eye(4)
step1 = np.dot(KalmanGain,Hqt)
step2 = ident - step1
corrP = np.dot(step2,estP)
def AHRS(timer):
global pitch,roll,yaw,estQuaternion,corrQuaternion,estP,corrP,R,Qt,Ew,hqt,Hqt,F,KalmanGain,Vt,Zt,deltaT,timeStep,time,topax,topay,topaz,topwx,topwy,topwz,axb,ayb,azb,wxb,wyb,wzb,wxc,wyc,wzc,axc,ayc,azc
ax,ay,az = ACCEL_data()
ax = ax/8192
ay = ay/8192
az = az/8192
wx,wy,wz = GYRO_data()
wx = (wx/32768)*250
wy = (wy/32768)*250
wz = (wz/32768)*250
if timeStep <= 100:
print("Don't Touch")
topax += ax
topay += ay
topaz += az
topwx += wx
topwy += wy
topwz += wz
elif timeStep == 101:
axb = topax/100
ayb = topay/100
azb = (topaz/100)-1
wxb = topwx/100
wyb = topwy/100
wzb = topwz/100
wxc = wx - wxb
wyc = wy - wyb
wzc = wz - wzb
axc = ax - axb
ayc = ay - ayb
azc = az - azb
initialize(axc,ayc,azc)
elif timeStep > 101:
wxc = math.radians(wx - wxb)
wyc = math.radians(wy - wyb)
wzc = math.radians(wz - wzb)
axc = ax - axb
ayc = ay - ayb
azc = az - azb
norm = 1/((axc**2 + ayc**2 + azc**2)**0.5)
axcn = axc*norm
aycn = ayc*norm
azcn = azc*norm
measModel()
Zt = np.array([[axcn],
[aycn],
[azcn]],dtype = np.float)
Vt = Zt-hqt
kalmangain()
correctedQuaternion()
correctedCovarianceMatrix()
#####################
cqw = corrQuaternion[0][0]
cqx = corrQuaternion[1][0]
cqy = corrQuaternion[2][0]
cqz = corrQuaternion[3][0]
norm = cqw*cqw + cqx*cqx + cqy*cqy + cqz*cqz
cqwn = corrQuaternion[0][0]/norm
cqxn = corrQuaternion[1][0]/norm
cqyn = corrQuaternion[2][0]/norm
cqzn = corrQuaternion[3][0]/norm
if timeStep % 20 == 0:
roll = math.atan2((2*(cqwn*cqxn+cqyn*cqzn)),(1 - cqxn**2 - cqyn**2))
pitch = math.asin(2*(cqwn*cqyn - cqxn*cqzn))
roll = math.degrees(roll)
pitch = math.degrees(pitch)
print(roll,pitch)
#####################
transitionMatrix()
processNoiseCovarianceMatrix()
estQua()
estCovarianceMatrix()
timeStep += 1
#time += 10
ACCEL_set_4g()
utime.sleep(1)
GYRO_set_250dps()
utime.sleep(1)
timer.init(freq=100, mode=Timer.PERIODIC, callback=AHRS)
ACCEL_cs.value(1)
GYRO_cs.value(1)



_Ujn5WoVOOu.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)




Comments