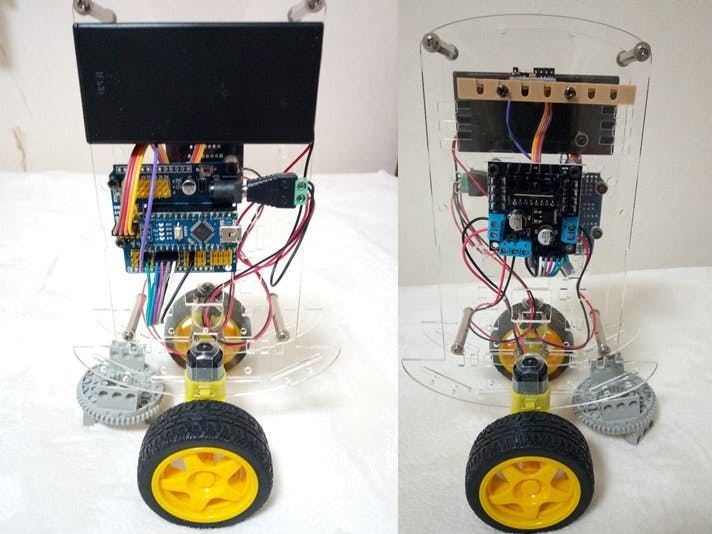
Japanese Golden Week Holiday (May 2020) and COVID Emergency Period gave me a lot of time to resume my hobby. I bought a cheap second-hand smart car robot (first photographs)
and converted it into an inverted pendulum robot (second photographs).
The motors are not good for this project since they have large backslashes, but this became another challenge for the project. I added a 6 degrees of freedom (DOF) gyro-sensor (around 60 Yen) obtained the roll, pitch, and yaw angles of the robot. The signal from the gyro-sensor is very noisy and Kalman Filter helps very much. For the overall control system, I used a proportional-integral-derivative (PID) algorithm and tuned the PID constants. The tuning process was time-consuming but I learned empirically the characteristics of the controlled pendulum and the control system itself. Putting the relatively heavy batteries at the upper part of the robot gave more inertia and helped very much stabilized the robot. “Stay at home” is not necessarily painful, it can be enjoyable also. I hope everyone is in good health and everything goes back to normal!



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments