

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
*This project is incomplete and we will list the troubles that we faced
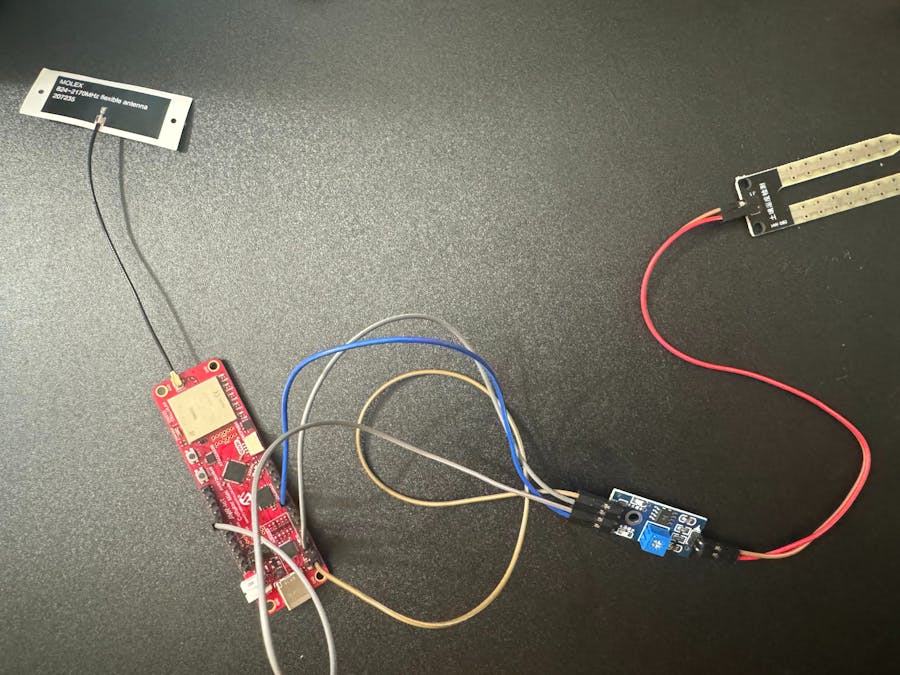
Idea:Our idea was to try to be able to measure water levels and then be able to predict possible flash floods, or just notify people of dangerously high water levels. This would be possible by sending our info through the cloud and send messages through an app or a website.
Parts We Were Able to ImplementWe hooked up the water sensor into the the chip and we were able to test the water levels by testing it in a cup of water. We were able to log the data into the Serial Terminal.
We were then able to send this info into the microchip sandbox. This allowed us to visualize the info
We started this class as an in-class assignment along with my group mates. Along with the many assignments that we already had, we didn't allocate enough time to this challenge as we should have. Most of us did not have very good coding experience, so it was difficult to try to program this chip. We tried to follow many the examples, only to not make it very far. With the lack of troubleshooting material online, we did not have a lot of ways to keep on moving with the project. We were on break for the final days of this challenge, so only one of us was allowed to bring the chip home, slowing the progress even further.
Whats Next?Though this contest was definitely challenging for us, this didn't stop us from trying. This assignment was out of our level, but that only makes us want to work on it even more. We were unable to bring our idea to life, but even after this contest is over, we will still try to work on this project. We will try to look at other submissions and see if that can help us. Hopefully we will be able to update this with our work in the future!
*Giving credit where it's due, I want to thank my classmate Minh Doan for doing A LOT of work on this project. He got the furthest in understanding how the chip worked and he was also the one to take the chip home during break. Most of his work didn't get anywhere but he put more work in than any of us other teammates.

Sanbox Code
C/C++#define SANDBOX_VERSION "1.3.10"
#include <ArduinoJson.h>
#include <ecc608.h>
#include <led_ctrl.h>
#include <log.h>
#include <lte.h>
#include <mcp9808.h>
#include <mqtt_client.h>
#include <veml3328.h>
// Added by STEAMClown
#include <Arduino.h>
#define HEARTBEAT_INTERVAL_MS 10000
// AWS defines which topic you are allowed to subscribe and publish too. This is
// defined by the policy The default policy with the Microchip IoT Provisioning
// Tool allows for publishing and subscribing on thing_id/topic. If you want to
// publish and subscribe on other topics, see the AWS IoT Core Policy
// documentation.
const char MQTT_SUB_TOPIC_FMT[] PROGMEM = "$aws/things/%s/shadow/update/delta";
const char MQTT_PUB_TOPIC_FMT[] PROGMEM = "%s/sensors";
#define NETWORK_CONN_FLAG (1 << 0)
#define NETWORK_DISCONN_FLAG (1 << 1)
#define BROKER_DISCONN_FLAG (1 << 3)
#define SEND_HEARTBEAT_FLAG (1 << 4)
#define STOP_PUBLISHING_SENSOR_DATA_FLAG (1 << 5)
#define START_PUBLISHING_SENSOR_DATA_FLAG (1 << 6)
#define SEND_SENSOR_DATA_FLAG (1 << 7)
// Allow 32 messsages in flight
#define RECEIVE_MESSAGE_ID_BUFFER_SIZE 32
#define RECEIVE_MESSAGE_ID_BUFFER_MASK (RECEIVE_MESSAGE_ID_BUFFER_SIZE - 1)
typedef enum {
NOT_CONNECTED,
CONNECTED_TO_NETWORK,
CONNECTED_TO_BROKER,
STREAMING_DATA
} State;
static State state = NOT_CONNECTED;
static volatile uint16_t event_flags = 0;
static char mqtt_sub_topic[128];
static char mqtt_pub_topic[128];
static unsigned long last_heartbeat_time = 0;
static volatile uint16_t seconds_counted = 0;
static volatile uint16_t target_seconds = 0;
static volatile uint16_t data_frequency = 0;
static unsigned long last_data_time = 0;
/**
* @brief Circular buffer for the message identifiers of the received messages.
*/
static uint32_t received_message_identifiers[RECEIVE_MESSAGE_ID_BUFFER_SIZE];
static volatile uint8_t received_message_identifiers_head = 0;
static volatile uint8_t received_message_identifiers_tail = 0;
static const char heartbeat_message[] = "{\"type\": \"heartbeat\"}";
char transmit_buffer[256];
ISR(TCA0_OVF_vect) {
seconds_counted++;
if (seconds_counted == target_seconds) {
event_flags |= STOP_PUBLISHING_SENSOR_DATA_FLAG;
}
TCA0.SINGLE.INTFLAGS = TCA_SINGLE_OVF_bm;
}
void sendHeartbeatInterrupt(void) {
if (PORTD.INTFLAGS & PIN2_bm) {
PORTD.INTFLAGS = PIN2_bm;
event_flags |= SEND_HEARTBEAT_FLAG;
}
}
void resetInterrupt(void) {
if (PORTF.INTFLAGS & PIN6_bm) {
PORTF.INTFLAGS = PIN6_bm;
asm("jmp 0");
}
}
void disconnectedFromNetwork(void) { event_flags |= NETWORK_DISCONN_FLAG; }
void disconnectedFromBroker(void) { event_flags |= BROKER_DISCONN_FLAG; }
void receivedMessage(__attribute__((unused)) const char* topic,
__attribute__((unused)) const uint16_t msg_length,
const int32_t msg_id) {
received_message_identifiers_head = (received_message_identifiers_head +
1) &
RECEIVE_MESSAGE_ID_BUFFER_MASK;
received_message_identifiers[received_message_identifiers_head] = msg_id;
}
void connectMqtt() {
MqttClient.onDisconnect(disconnectedFromBroker);
MqttClient.onReceive(receivedMessage);
// Attempt to connect to broker
// Do this in a loop so that we retry if it fails
while (!MqttClient.beginAWS()) { delay(1000); }
}
void connectLTE() {
Lte.onDisconnect(disconnectedFromNetwork);
// Start LTE modem and wait until we are connected to the operator.
// If initialization fails, we just retry in the loop
while (!Lte.begin()) {}
// Signal that we are connected
event_flags |= NETWORK_CONN_FLAG;
}
void startStreamTimer() {
// We need to tell the core that we're "taking over" the TCA0 timer
takeOverTCA0();
TCA0.SINGLE.INTCTRL = TCA_SINGLE_OVF_bm;
// Count per second (24MHz)
TCA0.SINGLE.PER = 23437;
sei();
// Enable the timer with a division of 1024
TCA0.SINGLE.CTRLA = TCA_SINGLE_CLKSEL_DIV1024_gc | TCA_SINGLE_ENABLE_bm;
}
void stopStreamTimer() { TCA0.SINGLE.CTRLA = 0; }
static JsonDocument doc;
void decodeMessage(const char* message) {
DeserializationError error = deserializeJson(doc, message);
if (error) {
Log.errorf(F("Unable to deserialize received JSON: %s\r\n"),
error.f_str());
return;
}
// Handle command frame
const char* cmd = doc["state"]["cmd"];
if (cmd == 0) {
Log.errorf(F("Unable to get command, pointer is zero, "
"message is %s\r\n"),
message);
return;
}
// If it's a toggle_led command, handle it
if (strcmp_P(cmd, PSTR("set_led")) == 0) {
// -- Read the led value
const char* target_led = doc["state"]["opts"]["led"];
const unsigned int target_state =
doc["state"]["opts"]["state"].as<unsigned int>();
if (target_led == 0) {
Log.errorf(F("Unable to get target led or state, pointer is zero, "
"message is %s\r\n"),
message);
return;
}
// -- Toggle LED based on the given value
Led led;
if (strcmp_P(target_led, PSTR("USER")) == 0) {
led = Led::USER;
} else if (strcmp_P(target_led, PSTR("ERROR")) == 0) {
led = Led::ERROR;
} else {
Log.errorf(F("Invalid LED value provided, "
"led provided = %s\r\n"),
target_led);
return;
}
if (target_state) {
Log.infof(F("Turning LED %s on\r\n"), target_led);
LedCtrl.on(led);
} else {
Log.infof(F("Turning LED %s off\r\n"), target_led);
LedCtrl.off(led);
}
} else if (strcmp_P(cmd, PSTR("stream")) == 0) {
const unsigned int duration =
doc["state"]["opts"]["duration"].as<unsigned int>();
const unsigned int frequency =
doc["state"]["opts"]["freq"].as<unsigned int>();
if (duration == 0 || frequency == 0) {
Log.errorf(F("Unable to get duration or frequency, pointer "
"is zero, message is %s\r\n"),
message);
return;
}
data_frequency = frequency;
seconds_counted = 0;
target_seconds = duration;
event_flags |= START_PUBLISHING_SENSOR_DATA_FLAG;
} else if (strcmp_P(cmd, PSTR("verbose_logs")) == 0) {
Log.setLogLevel(LogLevel::DEBUG);
}
}
void printHelp() {
Log.rawf(
F("\r\nAvailable Commands\r\n"
"-----------------------\r\n"
"help\t\t Print this message\r\n"
"loglevel=level\t Set the log level. Available levels are debug, "
"info, warn, error\r\n"
"-----------------------\r\n"));
}
void handleSerialCommand(const char* instruction, uint16_t instructionLen) {
// Find the first occurrence of '='
char* equalIndex = strchr(instruction, '=');
// If we did not find it, treat is at a non-value command
if (equalIndex == NULL) {
equalIndex = (char*)(&instruction[instructionLen - 1]);
Log.debug(F("Given command is non-value"));
}
// Extract the command
uint16_t cmdLen = equalIndex - instruction;
char cmd[cmdLen + 1];
memcpy(cmd, instruction, cmdLen);
cmd[cmdLen] = '\0';
// Extract the value
uint16_t valueLen = instructionLen - cmdLen - 1;
char value[valueLen + 1];
memcpy(value, instruction + cmdLen + 1, valueLen);
value[valueLen] = '\0';
// Depending on the cmd content, execute different commands
if (strcmp_P(cmd, PSTR("help")) == 0) {
printHelp();
} else if (strcmp_P(cmd, PSTR("loglevel")) == 0) {
if (!Log.setLogLevelStr(value)) {
Log.errorf(F("Could not set log level %s\r\n"), value);
} else {
Log.rawf(F("Log level is now %s\r\n"), value);
}
} else if (strcmp_P(cmd, PSTR("heartbeat")) == 0) {
event_flags |= SEND_HEARTBEAT_FLAG;
} else if (strcmp_P(cmd, PSTR("reset")) == 0) {
asm("jmp 0");
} else {
Log.info(F("\nInvalid command"));
printHelp();
return;
}
}
void setup() {
Log.begin(115200);
LedCtrl.begin();
LedCtrl.startupCycle();
// Set PD2 as input (button)
pinConfigure(PIN_PD2, PIN_DIR_INPUT | PIN_PULLUP_ON);
attachInterrupt(PIN_PD2, sendHeartbeatInterrupt, FALLING);
// Set PF6 as input (reset button)
pinConfigure(PIN_PF6, PIN_DIR_INPUT | PIN_PULLUP_ON);
attachInterrupt(PIN_PF6, resetInterrupt, FALLING);
sei();
Log.infof(F("Starting sandbox / landing page procedure. Version = %s\r\n"),
SANDBOX_VERSION);
if (Mcp9808.begin()) {
Log.error(F("Could not initialize the temperature sensor"));
while (1) {}
}
if (Veml3328.begin()) {
Log.error(F("Could not initialize the light sensor"));
while (1) {}
}
ECC608.begin();
// Find the thing ID and set the publish and subscription topics
uint8_t thing_name[128];
size_t thing_name_len = sizeof(thing_name);
ATCA_STATUS status =
ECC608.readProvisionItem(AWS_THINGNAME, thing_name, &thing_name_len);
if (status != ATCA_SUCCESS) {
Log.error(F("Could not retrieve thing name from the ECC"));
Log.error(F("Unable to initialize the MQTT topics. Stopping..."));
LedCtrl.on(Led::ERROR);
return;
}
Log.infof(F("Board name: %s\r\n"), thing_name);
sprintf_P(mqtt_sub_topic, MQTT_SUB_TOPIC_FMT, thing_name);
sprintf_P(mqtt_pub_topic, MQTT_PUB_TOPIC_FMT, thing_name);
Log.info(
F("Will now connect to the operator. If the board hasn't previously "
"connected to the operator/network, establishing the "
"connection the first time might take some time."));
connectLTE();
}
int motorTemp() {
analogRead(PIN_PD1);
float motor_analog_value = (float)analogRead(PIN_PD1);
//Serial3.println(motor_analog_value);
//delay(1000);
return motor_analog_value;
}
int RPM() {
//analogRead(PIN_PD3);
float motor_RPM_Pulse_value = (float)analogRead(PIN_PD3);
//Serial3.println(motor_RPM_Pulse_value);
//delay(1000);
return motor_RPM_Pulse_value;
}
void loop() {
// See if there are any messages for the command handler
if (Serial3.available()) {
String extractedString = Serial3.readStringUntil('\n');
handleSerialCommand(extractedString.c_str(), extractedString.length());
}
// ----------------------------------------------------------
if (event_flags & NETWORK_CONN_FLAG) {
switch (state) {
case NOT_CONNECTED:
state = CONNECTED_TO_NETWORK;
LedCtrl.on(Led::CELL);
Log.infof(F("Connected to operator: %s\r\n"),
Lte.getOperator().c_str());
connectMqtt();
Log.infof(
F("Connected to MQTT broker, subscribing to topic: %s!\r\n"),
mqtt_sub_topic);
MqttClient.subscribe(mqtt_sub_topic, AT_LEAST_ONCE);
state = CONNECTED_TO_BROKER;
break;
default:
break;
}
event_flags &= ~NETWORK_CONN_FLAG;
} else if (event_flags & NETWORK_DISCONN_FLAG) {
switch (state) {
default:
state = NOT_CONNECTED;
LedCtrl.off(Led::CELL);
LedCtrl.off(Led::CON);
LedCtrl.off(Led::DATA);
LedCtrl.off(Led::USER);
LedCtrl.off(Led::ERROR);
Log.info(F("Network disconnection, attempting to reconnect..."));
Lte.end();
connectLTE();
break;
}
event_flags &= ~NETWORK_DISCONN_FLAG;
} else if (event_flags & BROKER_DISCONN_FLAG) {
switch (state) {
case CONNECTED_TO_BROKER:
state = CONNECTED_TO_NETWORK;
Log.info(
F("Lost connection to broker, attempting to reconnect..."));
connectMqtt();
MqttClient.subscribe(mqtt_sub_topic, AT_LEAST_ONCE);
break;
case STREAMING_DATA:
state = CONNECTED_TO_NETWORK;
Log.info(
F("Lost connection to broker, attempting to reconnect..."));
stopStreamTimer();
connectMqtt();
MqttClient.subscribe(mqtt_sub_topic, AT_LEAST_ONCE);
break;
default:
break;
}
event_flags &= ~BROKER_DISCONN_FLAG;
} else if (received_message_identifiers_head !=
received_message_identifiers_tail) {
switch (state) {
case CONNECTED_TO_BROKER:
case STREAMING_DATA: {
char message[384] = "";
cli();
received_message_identifiers_tail =
(received_message_identifiers_tail + 1) &
RECEIVE_MESSAGE_ID_BUFFER_MASK;
const uint32_t message_id =
received_message_identifiers[received_message_identifiers_tail];
sei();
const bool message_read_successfully = MqttClient.readMessage(
mqtt_sub_topic,
message,
sizeof(message),
message_id);
if (message_read_successfully) {
decodeMessage(message);
} else {
Log.error(F("Failed to read message\r\n"));
}
} break;
default:
break;
}
} else if (event_flags & SEND_HEARTBEAT_FLAG) {
switch (state) {
case CONNECTED_TO_BROKER:
case STREAMING_DATA:
Log.info(F("Sending heartburn"));
MqttClient.publish(mqtt_pub_topic, heartbeat_message);
last_heartbeat_time = millis();
break;
default:
break;
}
event_flags &= ~SEND_HEARTBEAT_FLAG;
} else if (event_flags & START_PUBLISHING_SENSOR_DATA_FLAG) {
switch (state) {
case CONNECTED_TO_BROKER:
state = STREAMING_DATA;
Log.infof(F("Starting to stream data for %d seconds\r\n"),
target_seconds);
startStreamTimer();
break;
default:
break;
}
event_flags &= ~START_PUBLISHING_SENSOR_DATA_FLAG;
} else if (event_flags & STOP_PUBLISHING_SENSOR_DATA_FLAG) {
switch (state) {
case STREAMING_DATA:
state = CONNECTED_TO_BROKER;
break;
default:
break;
}
stopStreamTimer();
event_flags &= ~STOP_PUBLISHING_SENSOR_DATA_FLAG;
} else if (event_flags & SEND_SENSOR_DATA_FLAG) {
switch (state) {
case STREAMING_DATA:
last_data_time = millis();
// -- Warning: Doing sprintf on a pointer without checking for
// overflow is *bad* practice, but we do it here due to the
// simplicity of the data.
sprintf_P(transmit_buffer,
PSTR("{\"type\": \"data\",\
\"data\": { \
\"Motor Temperature\": %d, \
\"RPM Pulse\": %d \
} \
}"),
// add motor_analog_temp
//int(Mcp9808.readTempC()),
motorTemp(),
//Veml3328.getRed());
RPM());
if (!MqttClient.publish(mqtt_pub_topic, transmit_buffer)) {
Log.errorf(F("Failed to publish message: %s\r\n"),
transmit_buffer);
}
break;
default:
break;
}
event_flags &= ~SEND_SENSOR_DATA_FLAG;
}
switch (state) {
case CONNECTED_TO_BROKER:
if ((millis() - last_heartbeat_time) > HEARTBEAT_INTERVAL_MS) {
event_flags |= SEND_HEARTBEAT_FLAG;
}
break;
case STREAMING_DATA:
if ((millis() - last_heartbeat_time) > HEARTBEAT_INTERVAL_MS) {
event_flags |= SEND_HEARTBEAT_FLAG;
}
if ((millis() - last_data_time) > data_frequency) {
event_flags |= SEND_SENSOR_DATA_FLAG;
}
break;
default:
break;
}
}






{kind=link}
Comments